 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Benchmark Environment Motivated by Industrial Control Problems
Paper and Code
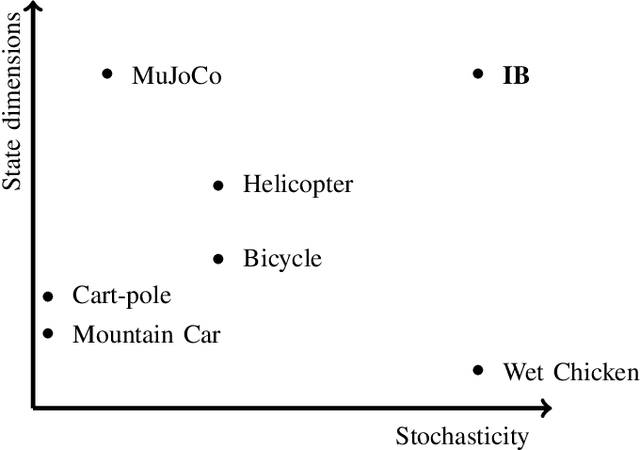
In the research area of reinforcement learning (RL), frequently novel and promising methods are developed and introduced to the RL community. However, although many researchers are keen to apply their methods on real-world problems, implementing such methods in real industry environments often is a frustrating and tedious process. Generally, academic research groups have only limited access to real industrial data and applications. For this reason, new methods are usually developed, evaluated and compared by using artificial software benchmarks. On one hand, these benchmarks are designed to provide interpretable RL training scenarios and detailed insight into the learning process of the method on hand. On the other hand, they usually do not share much similarity with industrial real-world applications. For this reason we used our industry experience to design a benchmark which bridges the gap between freely available, documented, and motivated artificial benchmarks and properties of real industrial problems. The resulting industrial benchmark (IB) has been made publicly available to the RL community by publishing its Java and Python code, including an OpenAI Gym wrapper, on Github. In this paper we motivate and describe in detail the IB's dynamics and identify prototypic experimental settings that capture common situations in real-world industry control problems.