 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative ISAC Network for Off-Grid Imaging-based Low-Altitude Surveillance
May 05, 2025



The low-altitude economy has emerged as a critical focus for future economic development, emphasizing the urgent need for flight activity surveillance utilizing the existing sensing capabilities of mobile cellular networks. Traditional monostatic or localization-based sensing methods, however, encounter challenges in fusing sensing results and matching channel parameters. To address these challenges, we propose an innovative approach that directly draws the radio images of the low-altitude space, leveraging its inherent sparsity with compressed sensing (CS)-based algorithms and the cooperation of multiple base stations. Furthermore, recognizing that unmanned aerial vehicles (UAVs) are randomly distributed in space, we introduce a physics-embedded learning method to overcome off-grid issues inherent in CS-based models. Additionally, an online hard example mining method is incorporated into the design of the loss function, enabling the network to adaptively concentrate on the samples bearing significant discrepancy with the ground truth, thereby enhancing its ability to detect the rare UAVs within the expansive low-altitude space. Simulation results demonstrate the effectiveness of the imaging-based low-altitude surveillance approach, with the proposed physics-embedded learning algorithm significantly outperforming traditional CS-based methods under off-grid conditions.
Learned Intelligent Recognizer with Adaptively Customized RIS Phases in Communication Systems
May 05, 2025This study presents an advanced wireless system that embeds target recognition within reconfigurable intelligent surface (RIS)-aided communication systems, powered by cuttingedge deep learning innovations. Such a system faces the challenge of fine-tuning both the RIS phase shifts and neural network (NN) parameters, since they intricately interdepend on each other to accomplish the recognition task. To address these challenges, we propose an intelligent recognizer that strategically harnesses every piece of prior action responses, thereby ingeniously multiplexing downlink signals to facilitate environment sensing. Specifically, we design a novel NN based on the long short-term memory (LSTM) architecture and the physical channel model. The NN iteratively captures and fuses information from previous measurements and adaptively customizes RIS configurations to acquire the most relevant information for the recognition task in subsequent moments. Tailored dynamically, these configurations adapt to the scene, task, and target specifics. Simulation results reveal that our proposed method significantly outperforms the state-of-the-art method, while resulting in minimal impacts on communication performance, even as sensing is performed simultaneously.
Joint Design of Radar Receive Filter and Unimodular ISAC Waveform with Sidelobe Level Control
Mar 19, 2025Integrated sensing and communication (ISAC) has been considered a key feature of next-generation wireless networks. This paper investigates the joint design of the radar receive filter and dual-functional transmit waveform for the multiple-input multiple-output (MIMO) ISAC system. While optimizing the mean square error (MSE) of the radar receive spatial response and maximizing the achievable rate at the communication receiver, besides the constraints of full-power radar receiving filter and unimodular transmit sequence, we control the maximum range sidelobe level, which is often overlooked in existing ISAC waveform design literature, for better radar imaging performance. To solve the formulated optimization problem with convex and nonconvex constraints, we propose an inexact augmented Lagrangian method (ALM) algorithm. For each subproblem in the proposed inexact ALM algorithm, we custom-design a block successive upper-bound minimization (BSUM) scheme with closed-form solutions for all blocks of variable to enhance the computational efficiency. Convergence analysis shows that the proposed algorithm is guaranteed to provide a stationary and feasible solution. Extensive simulations are performed to investigate the impact of different system parameters on communication and radar imaging performance. Comparison with the existing works shows the superiority of the proposed algorithm.
Networked Collaborative Sensing using Multi-domain Measurements: Architectures, Performance Limits and Algorithms
Feb 23, 2024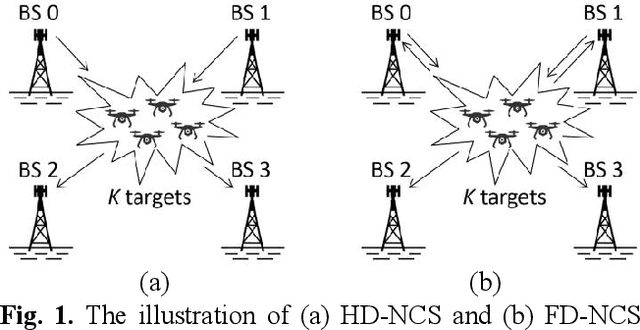
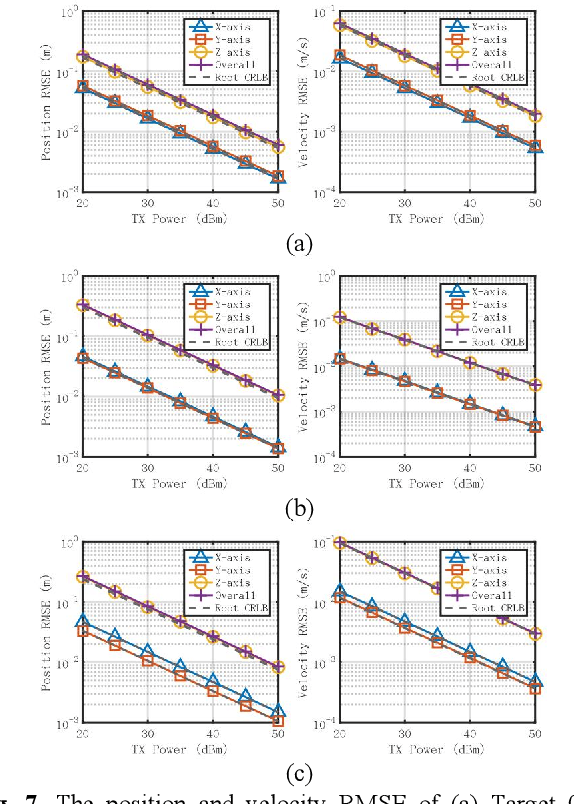
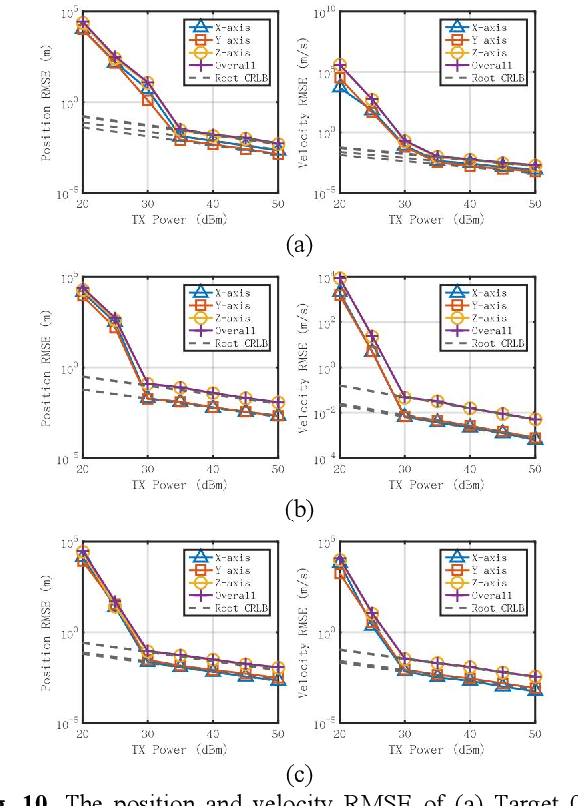
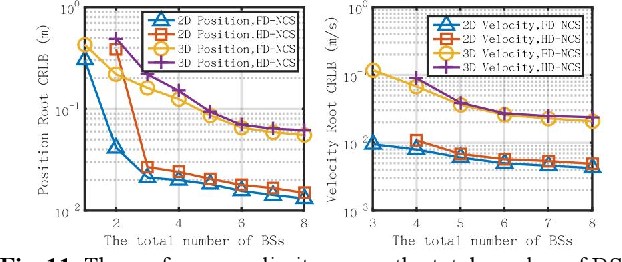
As a promising 6G technology, integrated sensing and communication (ISAC) gains growing interest. ISAC provides integration gain via sharing spectrum, hardware, and software. However, concerns exist regarding its sensing performance when compared to dedicated radar systems. To address this issue, the advantages of widely deployed networks should be utilized, and this paper proposes networked collaborative sensing (NCS) using multi-domain measurements (MM), including range, Doppler, and two-dimension angle of arrival. In the NCS-MM architecture, this paper proposes a novel multi-domain decoupling model and a novel guard band-based protocol. The proposed model simplifies multi-domain derivations and algorithm designs, and the proposed protocol conserves resources and mitigates NCS interference. To determine the performance limits, this paper derives the Cram\'er-Rao lower bound (CRLB) of three-dimension position and velocity in NCS-MM. An accumulated single-dimension channel model is used to obtain the CRLB of MM, which is proven to be equivalent to that of the multi-dimension model. The algorithms of both MM estimation and fusion are proposed. An arbitrary-dimension Newtonized orthogonal matched pursuit (AD-NOMP) is proposed to accurately estimate grid-less MM. The degree-of-freedom (DoF) of MM is analyzed, and a novel DoF-based two-stage weighted least squares (TSWLS) is proposed to reduce equations without DoF loss. The numerical results show that the performances of the proposed algorithms are close to their performance limits.
Energy-efficient Integrated Sensing and Communication System and DNLFM Waveform
Sep 18, 2023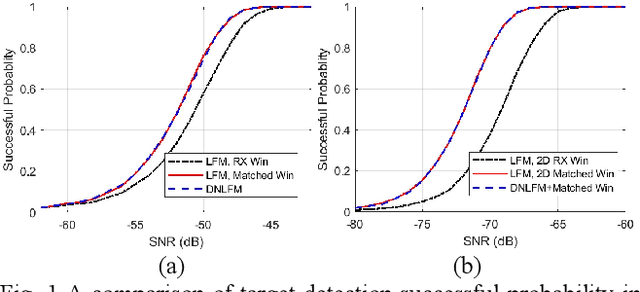
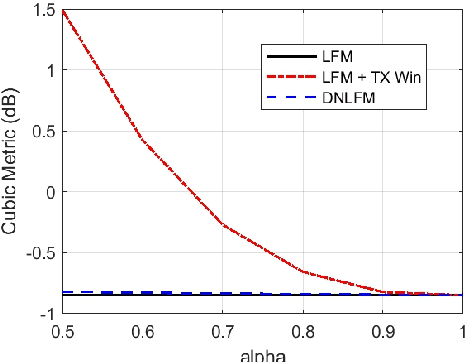
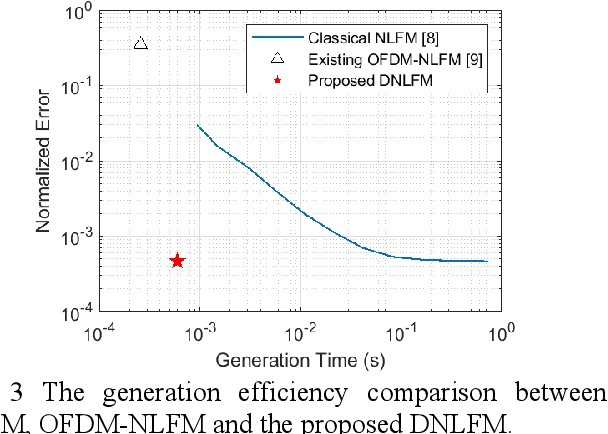

Integrated sensing and communication (ISAC) is a key enabler of 6G. Unlike communication radio links, the sensing signal requires to experience round trips from many scatters. Therefore, sensing is more power-sensitive and faces a severer multi-target interference. In this paper, the ISAC system employs dedicated sensing signals, which can be reused as the communication reference signal. This paper proposes to add time-frequency matched windows at both the transmitting and receiving sides, which avoids mismatch loss and increases energy efficiency. Discrete non-linear frequency modulation (DNLFM) is further proposed to achieve both time-domain constant modulus and frequency-domain arbitrary windowing weights. DNLFM uses very few Newton iterations and a simple geometrically-equivalent method to generate, which greatly reduces the complex numerical integral in the conventional method. Moreover, the spatial-domain matched window is proposed to achieve low sidelobes. The simulation results show that the proposed methods gain a higher energy efficiency than conventional methods.
Joint Beam Management and SLAM for mmWave Communication Systems
Jul 16, 2023



The millimeter-wave (mmWave) communication technology, which employs large-scale antenna arrays, enables inherent sensing capabilities. Simultaneous localization and mapping (SLAM) can utilize channel multipath angle estimates to realize integrated sensing and communication design in 6G communication systems. However, existing works have ignored the significant overhead required by the mmWave beam management when implementing SLAM with angle estimates. This study proposes a joint beam management and SLAM design that utilizes the strong coupling between the radio map and channel multipath for simultaneous beam management, localization, and mapping. In this approach, we first propose a hierarchical sweeping and sensing service design. The path angles are estimated in the hierarchical sweeping, enabling angle-based SLAM with the aid of an inertial measurement unit (IMU) to realize sensing service. Then, feature-aided tracking is proposed that utilizes prior angle information generated from the radio map and IMU. Finally, a switching module is introduced to enable flexible switching between hierarchical sweeping and feature-aided tracking. Simulations show that the proposed joint design can achieve sub-meter level localization and mapping accuracy (with an error < 0.5 m). Moreover, the beam management overhead can be reduced by approximately 40% in different wireless environments.
Joint Localization and Environment Sensing by Harnessing NLOS Components in RIS-aided mmWave Communication Systems
May 21, 2023



This study explores the use of non-line-of-sight (NLOS) components in millimeter-wave (mmWave) communication systems for joint localization and environment sensing. The radar cross section (RCS) of a reconfigurable intelligent surface (RIS) is calculated to develop a general path gain model for RISs and traditional scatterers. The results show that RISs have a greater potential to assist in localization due to their ability to maintain high RCSs and create strong NLOS links. A one-stage linear weighted least squares estimator is proposed to simultaneously determine user equipment (UE) locations, velocities, and scatterer (or RIS) locations using line-of-sight (LOS) and NLOS paths. The estimator supports environment sensing and UE localization even using only NLOS paths. A second-stage estimator is also introduced to improve environment sensing accuracy by considering the nonlinear relationship between UE and scatterer locations. Simulation results demonstrate the effectiveness of the proposed estimators in rich scattering environments and the benefits of using NLOS paths for improving UE location accuracy and assisting in environment sensing. The effects of RIS number, size, and deployment on localization performance are also analyzed.
* 32 pages, 12 figures, accepted by IEEE Transactions on Wireless Communications
Waveform Design and Hybrid Duplex Exploiting Radar Features for Joint Communication and Sensing
Jul 07, 2022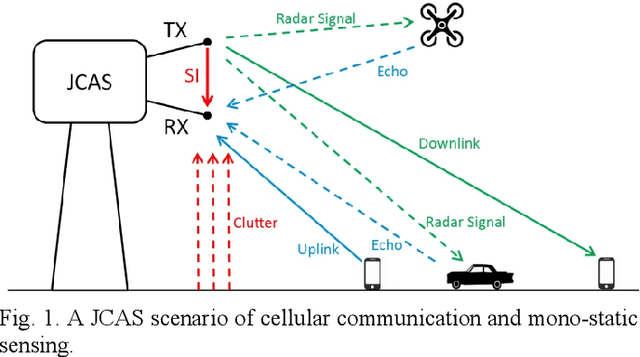
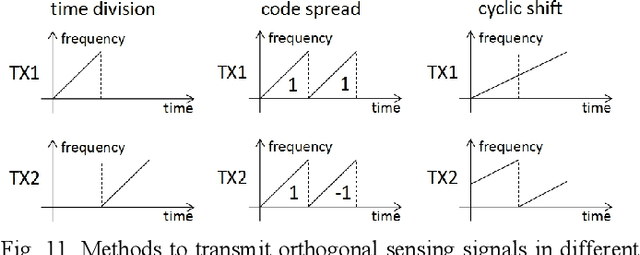
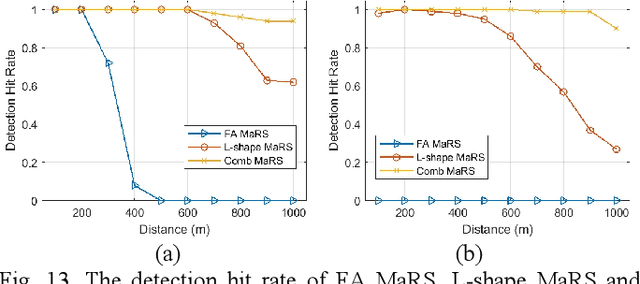
Joint communication and sensing (JCAS) is a very promising 6G technology, which attracts more and more research attention. Unlike communication, radar has many unique features in terms of waveform criteria, self-interference cancellation (SIC), aperture-dependent resolution, and virtual aperture. This paper proposes a waveform design named max-aperture radar slicing (MaRS) to gain a large time-frequency aperture, which reuses the orthogonal frequency division multiplexing (OFDM) hardware and occupies only a tiny fraction of OFDM resources. The proposed MaRS keeps the radar advantages of constant modulus, zero auto-correlation, and simple SIC. Joint space-time processing algorithms are proposed to recover the range-velocity-angle information from strong clutters. Furthermore, this paper proposes a hybrid-duplex JCAS scheme where communication is half-duplex while radar is full-duplex. In this scheme, the half-duplex communication antenna array is reused, and a small sensing-dedicated antenna array is specially designed. Using these two arrays, a large space-domain aperture is virtually formed to greatly improve the angle resolution. The numerical results show that the proposed MaRS and hybrid-duplex schemes achieve a high sensing resolution with less than 0.4% OFDM resources and gain an almost 100% hit rate for both car and UAV detection at a range up to 1 km.
Waveform Design Using Half-duplex Devices for 6G Joint Communications and Sensing
Jan 04, 2022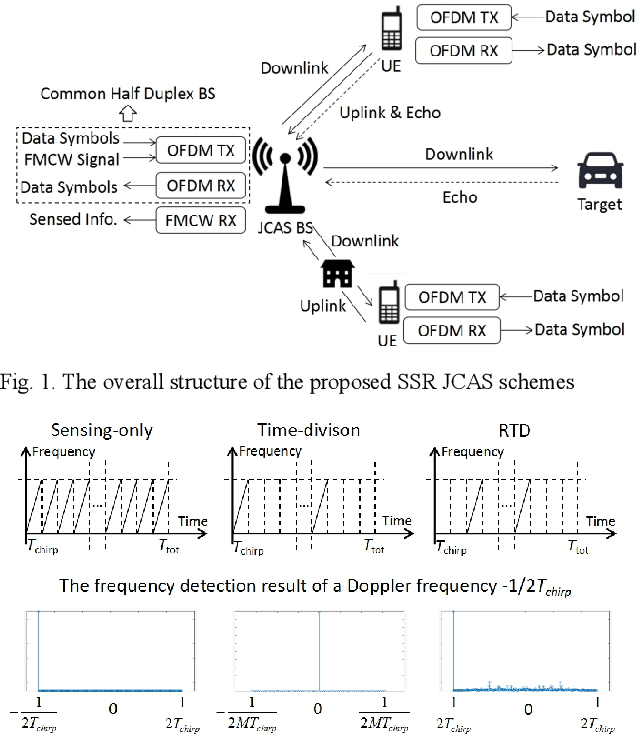
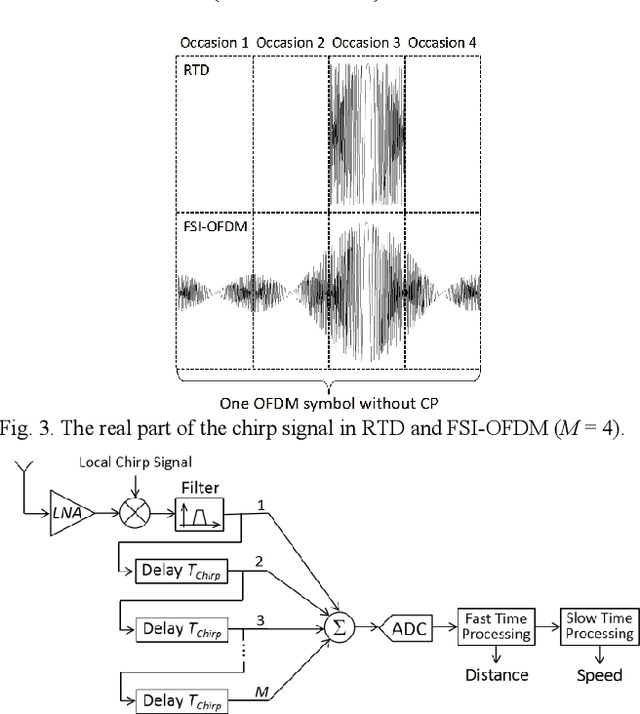
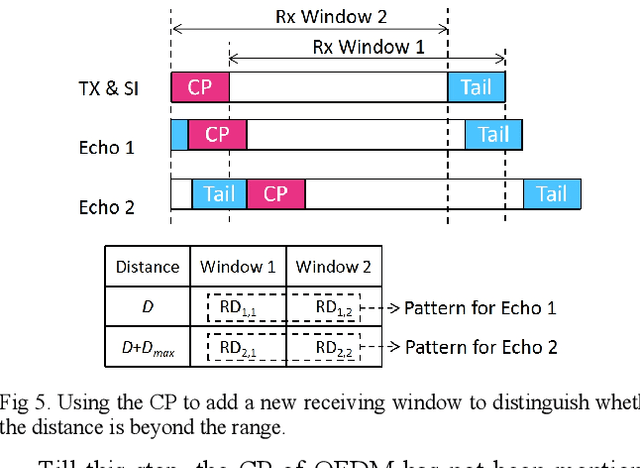
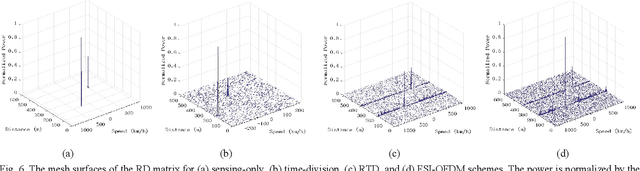
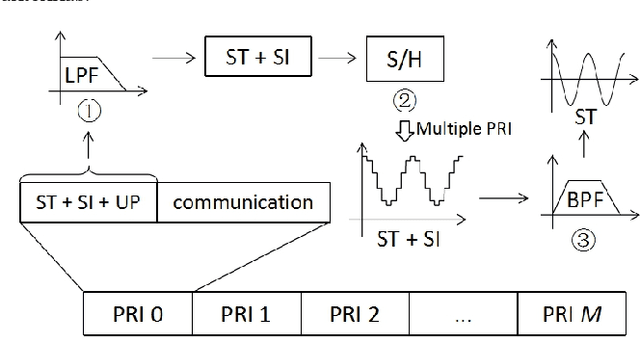
Joint communications and sensing is a promising 6G technology, and the challenge is how to integrate them efficiently. Existing frequency-division and time-division coexistence can hardly bring a gain of integration. Directly using orthogonal frequency-division multiplexing (OFDM) to sense requires complex in-band full-duplex to cancel the selfinterference (SI). To solve these problems, this paper proposes novel coexistence schemes to gain super sensing range (SSR) and simple SI cancellation. SSR enables JCS to gain a sensing range of a sensing-only scheme and shares the resources with communications. Random time-division is proposed to gain a super Doppler range. Flexible sensing implanted OFDM (FSIOFDM) is also proposed. FSI-OFDM uses random sensing occasions to gain super Doppler range, as well as utilizes the fixed tail sensing occasions to achieve supper distance range. The simulation results show that the proposed schemes can gain SSR with limited resources.
Integrated Sensing and Communications for V2I Networks: Dynamic Predictive Beamforming for Extended Vehicle Targets
Nov 26, 2021
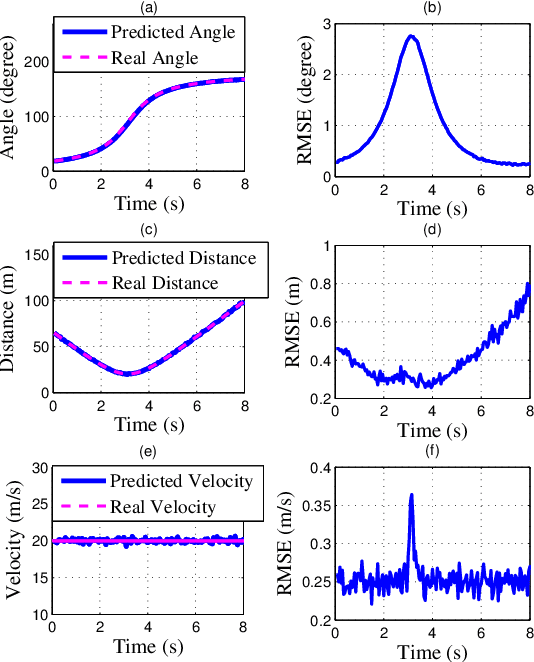
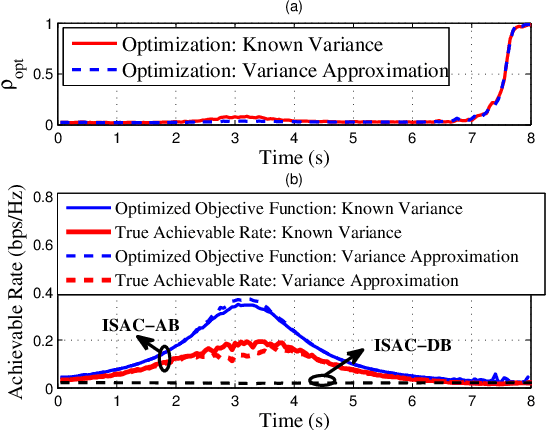
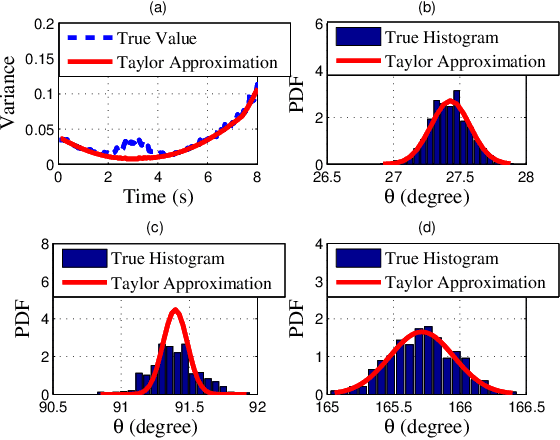
We investigate sensing-assisted predictive beamforming schemes for vehicle-to-infrastructure (V2I) communication by exploiting the integrated sensing and communication (ISAC) functionalities at the roadside unit (RSU). The RSU deploys a massive multi-input-multi-output (mMIMO) array and operates at millimeter wave (mmWave) frequencies. The pencil-sharp mMIMO beams and fine range resolution achieved at mmWave, implicates that the point target assumption is impractical in such V2I networks, as the volume and shape of the vehicles become essential for beamforming. Simply pointing a beam to the vehicle may result in the communication receiver (CR) never lying in the beam, even when the vehicle's trajectory is accurately tracked. To tackle this problem, we consider the extended vehicle target with two novel beam tracking schemes. For the first scheme, the beamwidth is adjusted in real-time to cover the entire vehicle, followed by an extended Kalman filtering (EKF) algorithm to predict and track the position of CR according to the resolved high-resolution scatterers. An upgraded scheme is further proposed by splitting each transmission block into two stages. The first stage is exploited for ISAC transmission, where a wide beam is adopted for both communication and sensing. Based on the sensed results at the first stage, the second stage is dedicated to communication by adopting a pencil-sharp beam, yielding a significant improvement of the achievable rate. We further reveal the inherent tradeoff between the two stages in terms of their durations, and develop an optimal time allocation strategy that maximizes the average achievable rate. Finally, numerical results are provided to verify the superiorities of proposed schemes over the state-of-the-art methods.