 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Sensing and Communications for V2I Networks: Dynamic Predictive Beamforming for Extended Vehicle Targets
Paper and Code
Nov 26, 2021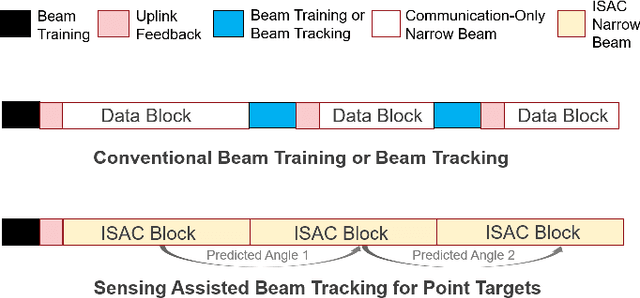
We investigate sensing-assisted predictive beamforming schemes for vehicle-to-infrastructure (V2I) communication by exploiting the integrated sensing and communication (ISAC) functionalities at the roadside unit (RSU). The RSU deploys a massive multi-input-multi-output (mMIMO) array and operates at millimeter wave (mmWave) frequencies. The pencil-sharp mMIMO beams and fine range resolution achieved at mmWave, implicates that the point target assumption is impractical in such V2I networks, as the volume and shape of the vehicles become essential for beamforming. Simply pointing a beam to the vehicle may result in the communication receiver (CR) never lying in the beam, even when the vehicle's trajectory is accurately tracked. To tackle this problem, we consider the extended vehicle target with two novel beam tracking schemes. For the first scheme, the beamwidth is adjusted in real-time to cover the entire vehicle, followed by an extended Kalman filtering (EKF) algorithm to predict and track the position of CR according to the resolved high-resolution scatterers. An upgraded scheme is further proposed by splitting each transmission block into two stages. The first stage is exploited for ISAC transmission, where a wide beam is adopted for both communication and sensing. Based on the sensed results at the first stage, the second stage is dedicated to communication by adopting a pencil-sharp beam, yielding a significant improvement of the achievable rate. We further reveal the inherent tradeoff between the two stages in terms of their durations, and develop an optimal time allocation strategy that maximizes the average achievable rate. Finally, numerical results are provided to verify the superiorities of proposed schemes over the state-of-the-art methods.