 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystem 0/1/2/3: Quad-process theory for multi-timescale embodied collective cognitive systems
Mar 08, 2025



This paper introduces the System 0/1/2/3 framework as an extension of dual-process theory, employing a quad-process model of cognition. Expanding upon System 1 (fast, intuitive thinking) and System 2 (slow, deliberative thinking), we incorporate System 0, which represents pre-cognitive embodied processes, and System 3, which encompasses collective intelligence and symbol emergence. We contextualize this model within Bergson's philosophy by adopting multi-scale time theory to unify the diverse temporal dynamics of cognition. System 0 emphasizes morphological computation and passive dynamics, illustrating how physical embodiment enables adaptive behavior without explicit neural processing. Systems 1 and 2 are explained from a constructive perspective, incorporating neurodynamical and AI viewpoints. In System 3, we introduce collective predictive coding to explain how societal-level adaptation and symbol emergence operate over extended timescales. This comprehensive framework ranges from rapid embodied reactions to slow-evolving collective intelligence, offering a unified perspective on cognition across multiple timescales, levels of abstraction, and forms of human intelligence. The System 0/1/2/3 model provides a novel theoretical foundation for understanding the interplay between adaptive and cognitive processes, thereby opening new avenues for research in cognitive science, AI, robotics, and collective intelligence.
World Models and Predictive Coding for Cognitive and Developmental Robotics: Frontiers and Challenges
Jan 14, 2023Creating autonomous robots that can actively explore the environment, acquire knowledge and learn skills continuously is the ultimate achievement envisioned in cognitive and developmental robotics. Their learning processes should be based on interactions with their physical and social world in the manner of human learning and cognitive development. Based on this context, in this paper, we focus on the two concepts of world models and predictive coding. Recently, world models have attracted renewed attention as a topic of considerable interest in artificial intelligence. Cognitive systems learn world models to better predict future sensory observations and optimize their policies, i.e., controllers. Alternatively, in neuroscience, predictive coding proposes that the brain continuously predicts its inputs and adapts to model its own dynamics and control behavior in its environment. Both ideas may be considered as underpinning the cognitive development of robots and humans capable of continual or lifelong learning. Although many studies have been conducted on predictive coding in cognitive robotics and neurorobotics, the relationship between world model-based approaches in AI and predictive coding in robotics has rarely been discussed. Therefore, in this paper, we clarify the definitions, relationships, and status of current research on these topics, as well as missing pieces of world models and predictive coding in conjunction with crucially related concepts such as the free-energy principle and active inference in the context of cognitive and developmental robotics. Furthermore, we outline the frontiers and challenges involved in world models and predictive coding toward the further integration of AI and robotics, as well as the creation of robots with real cognitive and developmental capabilities in the future.
Latent Representation in Human-Robot Interaction with Explicit Consideration of Periodic Dynamics
Jun 16, 2021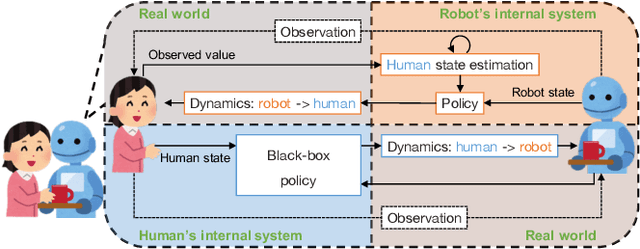
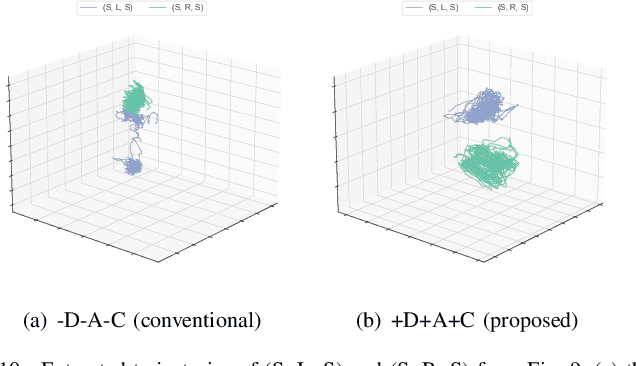
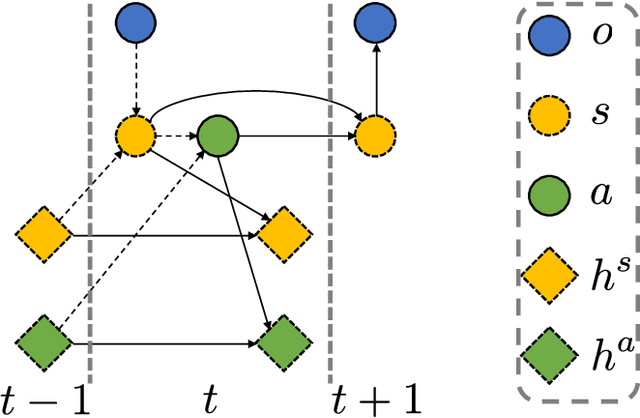
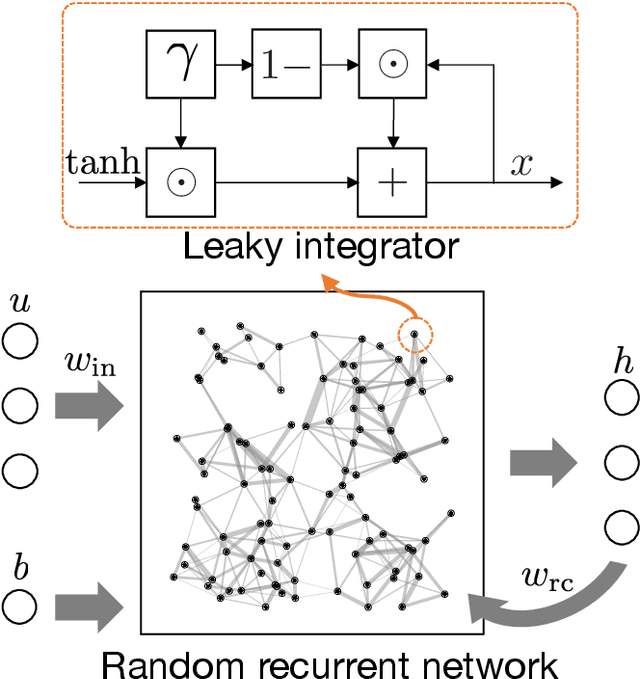
This paper presents a new data-driven framework for analyzing periodic physical human-robot interaction (pHRI) in latent state space. To elaborate human understanding and/or robot control during pHRI, the model representing pHRI is critical. Recent developments of deep learning technologies would enable us to learn such a model from a dataset collected from the actual pHRI. Our framework is developed based on variational recurrent neural network (VRNN), which can inherently handle time-series data like one pHRI generates. This paper modifies VRNN in order to include the latent dynamics from robot to human explicitly. In addition, to analyze periodic motions like walking, we integrate a new recurrent network based on reservoir computing (RC), which has random and fixed connections between numerous neurons, with VRNN. By augmenting RC into complex domain, periodic behavior can be represented as the phase rotation in complex domain without decaying the amplitude. For verification of the proposed framework, a rope-rotation/swinging experiment was analyzed. The proposed framework, trained on the dataset collected from the experiment, achieved the latent state space where the differences in periodic motions can be distinguished. Such a well-distinguished space yielded the best prediction accuracy of the human observations and the robot actions. The attached video can be seen in youtube: https://youtu.be/umn0MVcIpsY
Building-GAN: Graph-Conditioned Architectural Volumetric Design Generation
Apr 27, 2021
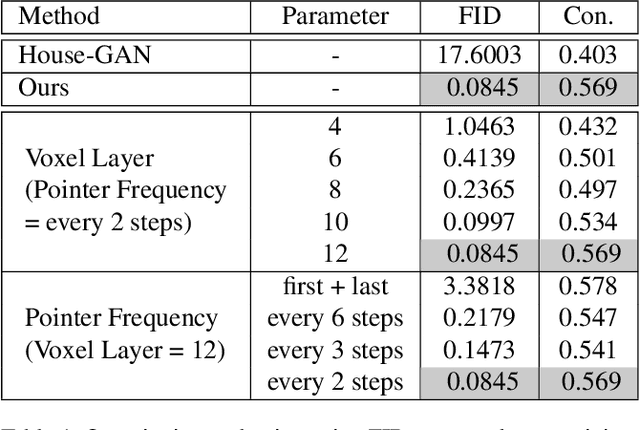
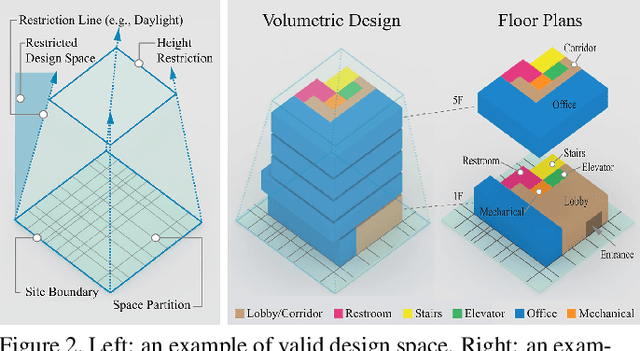
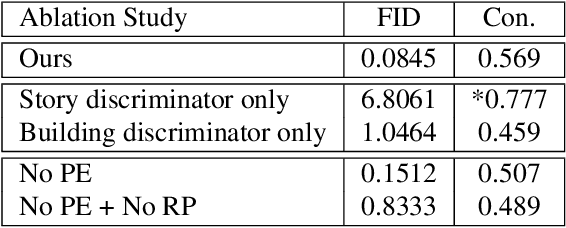
Volumetric design is the first and critical step for professional building design, where architects not only depict the rough 3D geometry of the building but also specify the programs to form a 2D layout on each floor. Though 2D layout generation for a single story has been widely studied, there is no developed method for multi-story buildings. This paper focuses on volumetric design generation conditioned on an input program graph. Instead of outputting dense 3D voxels, we propose a new 3D representation named voxel graph that is both compact and expressive for building geometries. Our generator is a cross-modal graph neural network that uses a pointer mechanism to connect the input program graph and the output voxel graph, and the whole pipeline is trained using the adversarial framework. The generated designs are evaluated qualitatively by a user study and quantitatively using three metrics: quality, diversity, and connectivity accuracy. We show that our model generates realistic 3D volumetric designs and outperforms previous methods and baselines.
Detecting Features of Tools, Objects, and Actions from Effects in a Robot using Deep Learning
Sep 23, 2018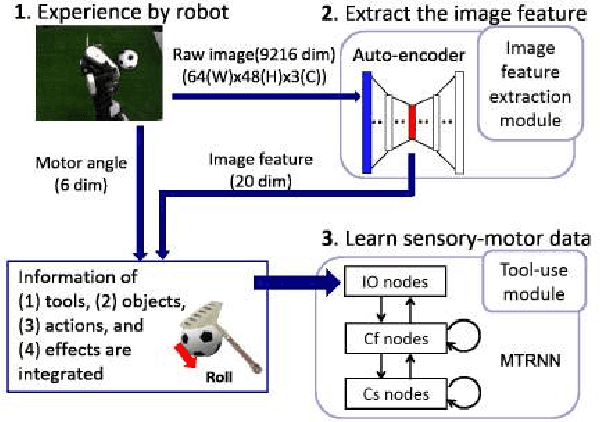
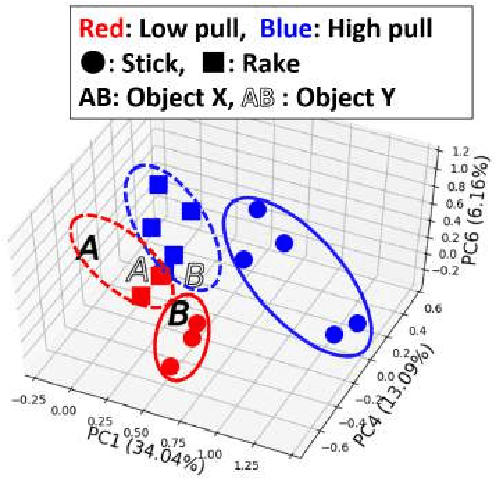
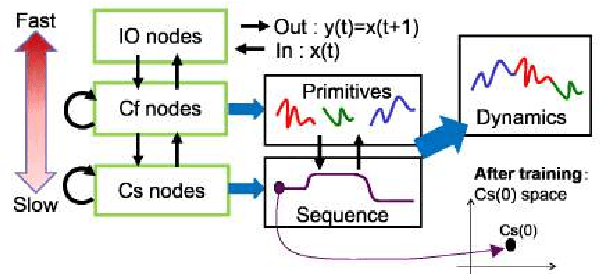
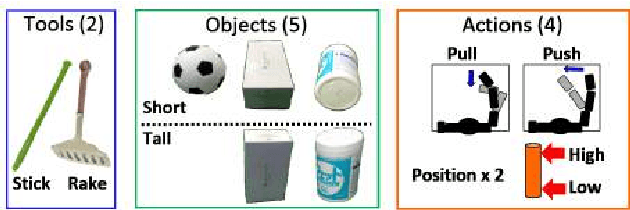
We propose a tool-use model that can detect the features of tools, target objects, and actions from the provided effects of object manipulation. We construct a model that enables robots to manipulate objects with tools, using infant learning as a concept. To realize this, we train sensory-motor data recorded during a tool-use task performed by a robot with deep learning. Experiments include four factors: (1) tools, (2) objects, (3) actions, and (4) effects, which the model considers simultaneously. For evaluation, the robot generates predicted images and motions given information of the effects of using unknown tools and objects. We confirm that the robot is capable of detecting features of tools, objects, and actions by learning the effects and executing the task.