 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedFeat+: A Robust Federated Learning Framework Through Federated Aggregation and Differentially Private Feature-Based Classifier Retraining
Apr 08, 2025In this paper, we propose the FedFeat+ framework, which distinctively separates feature extraction from classification. We develop a two-tiered model training process: following local training, clients transmit their weights and some features extracted from the feature extractor from the final local epochs to the server. The server aggregates these models using the FedAvg method and subsequently retrains the global classifier utilizing the shared features. The classifier retraining process enhances the model's understanding of the holistic view of the data distribution, ensuring better generalization across diverse datasets. This improved generalization enables the classifier to adaptively influence the feature extractor during subsequent local training epochs. We establish a balance between enhancing model accuracy and safeguarding individual privacy through the implementation of differential privacy mechanisms. By incorporating noise into the feature vectors shared with the server, we ensure that sensitive data remains confidential. We present a comprehensive convergence analysis, along with theoretical reasoning regarding performance enhancement and privacy preservation. We validate our approach through empirical evaluations conducted on benchmark datasets, including CIFAR-10, CIFAR-100, MNIST, and FMNIST, achieving high accuracy while adhering to stringent privacy guarantees. The experimental results demonstrate that the FedFeat+ framework, despite using only a lightweight two-layer CNN classifier, outperforms the FedAvg method in both IID and non-IID scenarios, achieving accuracy improvements ranging from 3.92 % to 12.34 % across CIFAR-10, CIFAR-100, and Fashion-MNIST datasets.
Federated Hybrid Training and Self-Adversarial Distillation: Towards Robust Edge Networks
Dec 26, 2024



Federated learning (FL) is a distributed training technology that enhances data privacy in mobile edge networks by allowing data owners to collaborate without transmitting raw data to the edge server. However, data heterogeneity and adversarial attacks pose challenges to develop an unbiased and robust global model for edge deployment. To address this, we propose Federated hyBrid Adversarial training and self-adversarial disTillation (FedBAT), a new framework designed to improve both robustness and generalization of the global model. FedBAT seamlessly integrates hybrid adversarial training and self-adversarial distillation into the conventional FL framework from data augmentation and feature distillation perspectives. From a data augmentation perspective, we propose hybrid adversarial training to defend against adversarial attacks by balancing accuracy and robustness through a weighted combination of standard and adversarial training. From a feature distillation perspective, we introduce a novel augmentation-invariant adversarial distillation method that aligns local adversarial features of augmented images with their corresponding unbiased global clean features. This alignment can effectively mitigate bias from data heterogeneity while enhancing both the robustness and generalization of the global model. Extensive experimental results across multiple datasets demonstrate that FedBAT yields comparable or superior performance gains in improving robustness while maintaining accuracy compared to several baselines.
Active STAR-RIS Empowered Edge System for Enhanced Energy Efficiency and Task Management
Aug 23, 2024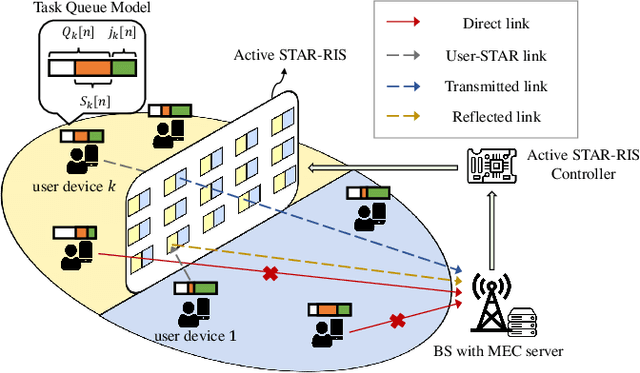
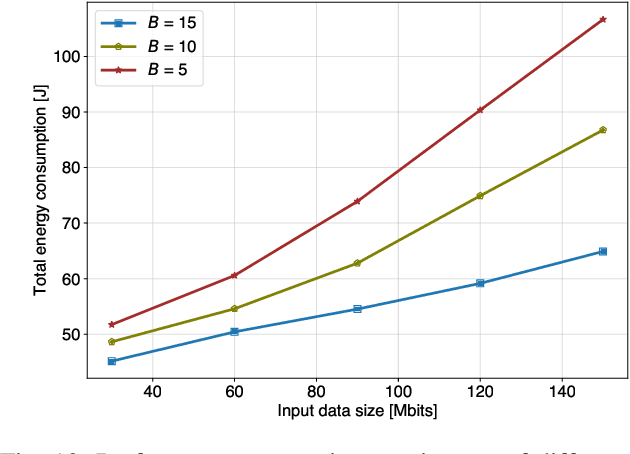
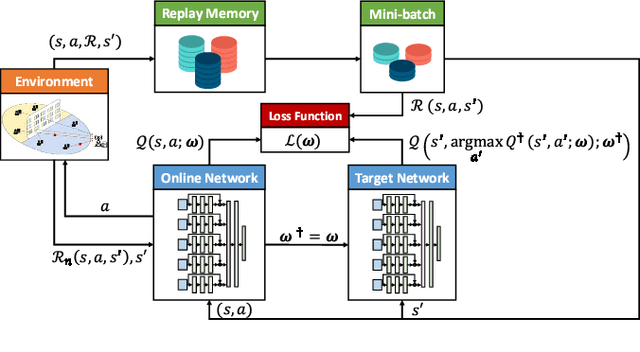
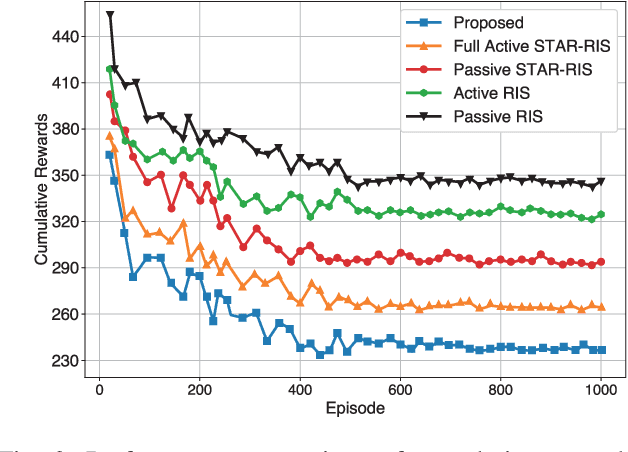
The proliferation of data-intensive and low-latency applications has driven the development of multi-access edge computing (MEC) as a viable solution to meet the increasing demands for high-performance computing and storage capabilities at the network edge. Despite the benefits of MEC, challenges such as obstructions cause non-line-of-sight (NLoS) communication to persist. Reconfigurable intelligent surfaces (RISs) and the more advanced simultaneously transmitting and reflecting (STAR)-RISs have emerged to address these challenges; however, practical limitations and multiplicative fading effects hinder their efficacy. We propose an active STAR-RIS-assisted MEC system to overcome these obstacles, leveraging the advantages of active STAR-RIS. The main contributions consist of formulating an optimization problem to minimize energy consumption with task queue stability by jointly optimizing the partial task offloading, amplitude, phase shift coefficients, amplification coefficients, transmit power of the base station (BS), and admitted tasks. Furthermore, we decompose the non-convex problem into manageable sub-problems, employing sequential fractional programming for transmit power control, convex optimization technique for task offloading, and Lyapunov optimization with double deep Q-network (DDQN) for joint amplitude, phase shift, amplification, and task admission. Extensive performance evaluations demonstrate the superiority of the proposed system over benchmark schemes, highlighting its potential for enhancing MEC system performance. Numerical results indicate that our proposed system outperforms the conventional STAR-RIS-assisted by 18.64\% and the conventional RIS-assisted system by 30.43\%, respectively.
Advancing Ultra-Reliable 6G: Transformer and Semantic Localization Empowered Robust Beamforming in Millimeter-Wave Communications
Jun 04, 2024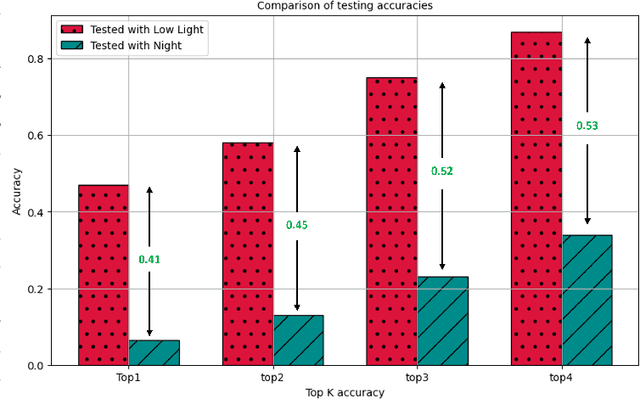
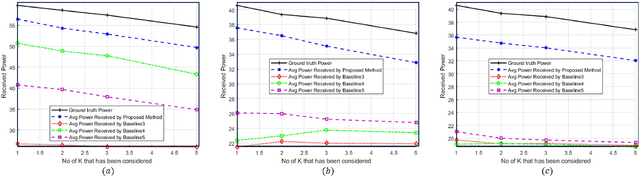
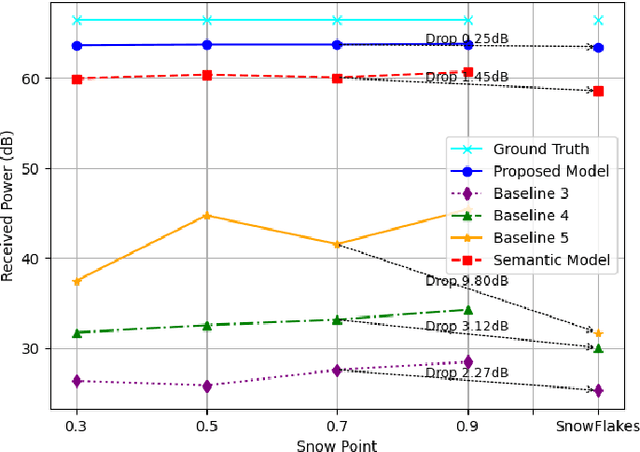
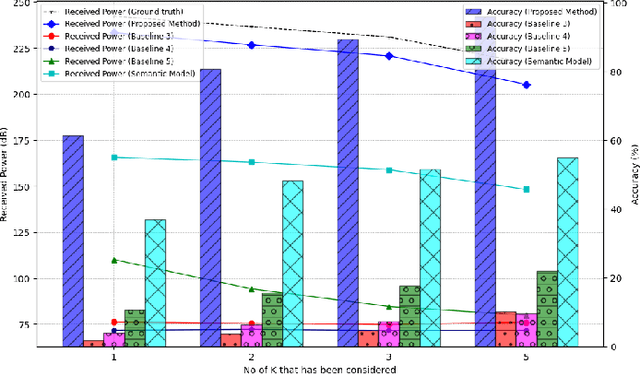
Advancements in 6G wireless technology have elevated the importance of beamforming, especially for attaining ultra-high data rates via millimeter-wave (mmWave) frequency deployment. Although promising, mmWave bands require substantial beam training to achieve precise beamforming. While initial deep learning models that use RGB camera images demonstrated promise in reducing beam training overhead, their performance suffers due to sensitivity to lighting and environmental variations. Due to this sensitivity, Quality of Service (QoS) fluctuates, eventually affecting the stability and dependability of networks in dynamic environments. This emphasizes a critical need for more robust solutions. This paper proposes a robust beamforming technique to ensure consistent QoS under varying environmental conditions. An optimization problem has been formulated to maximize users' data rates. To solve the formulated NP-hard optimization problem, we decompose it into two subproblems: the semantic localization problem and the optimal beam selection problem. To solve the semantic localization problem, we propose a novel method that leverages the k-means clustering and YOLOv8 model. To solve the beam selection problem, we propose a novel lightweight hybrid architecture that utilizes various data sources and a weighted entropy-based mechanism to predict the optimal beams. Rapid and accurate beam predictions are needed to maintain QoS. A novel metric, Accuracy-Complexity Efficiency (ACE), has been proposed to quantify this. Six testing scenarios have been developed to evaluate the robustness of the proposed model. Finally, the simulation result demonstrates that the proposed model outperforms several state-of-the-art baselines regarding beam prediction accuracy, received power, and ACE in the developed test scenarios.
Data Service Maximization in Integrated Terrestrial-Non-Terrestrial 6G Networks: A Deep Reinforcement Learning Approach
May 30, 2024



Integrating terrestrial and non-terrestrial networks has emerged as a promising paradigm to fulfill the constantly growing demand for connectivity, low transmission delay, and quality of services (QoS). This integration brings together the strengths of terrestrial and non-terrestrial networks, such as the reliability of terrestrial networks, broad coverage, and service continuity of non-terrestrial networks like low earth orbit (LEO) satellites. In this work, we study a data service maximization problem in an integrated terrestrial-non-terrestrial network (I-TNT) where the ground base stations (GBSs) and LEO satellites cooperatively serve the coexisting aerial users (AUs) and ground users (GUs). Then, by considering the spectrum scarcity, interference, and QoS requirements of the users, we jointly optimize the user association, AUE's trajectory, and power allocation. To tackle the formulated mixed-integer non-convex problem, we disintegrate it into two subproblems: 1) user association problem and 2) trajectory and power allocation problem. Since the user association problem is a binary integer programming problem, we use the standard convex optimization method to solve it. Meanwhile, the trajectory and power allocation problem is solved by the deep deterministic policy gradient (DDPG) method to cope with the problem's non-convexity and dynamic network environments. Then, the two subproblems are alternately solved by the proposed iterative algorithm. By comparing with the baselines in the existing literature, extensive simulations are conducted to evaluate the performance of the proposed framework.
Collaboration in the Sky: A Distributed Framework for Task Offloading and Resource Allocation in Multi-Access Edge Computing
Jul 30, 2021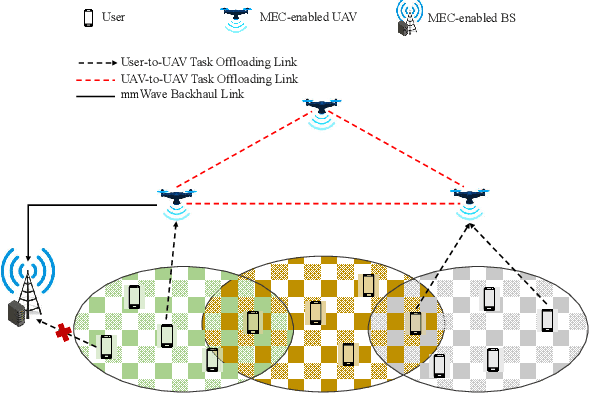
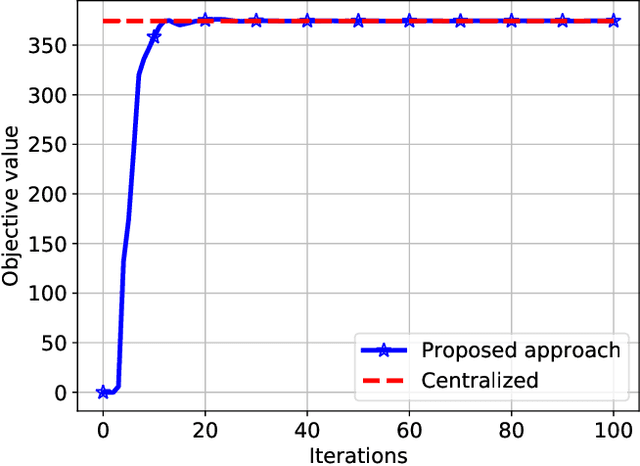
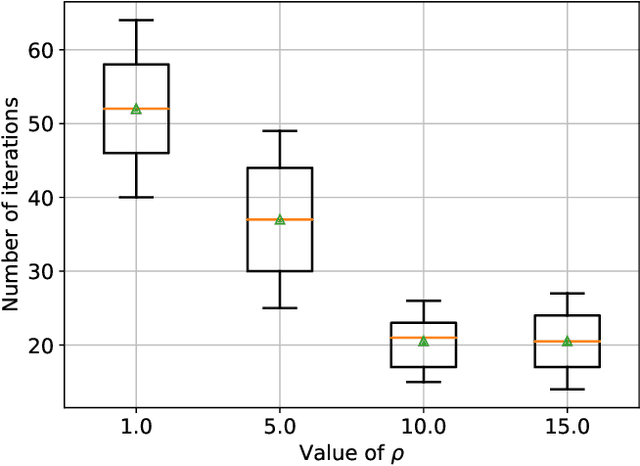
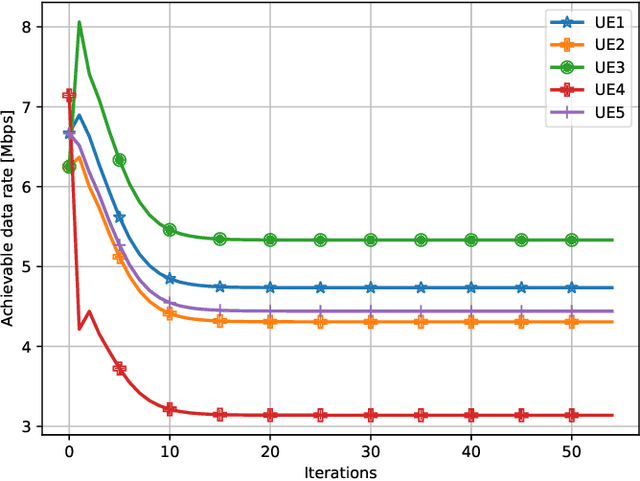
Recently, unmanned aerial vehicles (UAVs) assisted multi-access edge computing (MEC) systems emerged as a promising solution for providing computation services to mobile users outside of terrestrial infrastructure coverage. As each UAV operates independently, however, it is challenging to meet the computation demands of the mobile users due to the limited computing capacity at the UAV's MEC server as well as the UAV's energy constraint. Therefore, collaboration among UAVs is needed. In this paper, a collaborative multi-UAV-assisted MEC system integrated with a MEC-enabled terrestrial base station (BS) is proposed. Then, the problem of minimizing the total latency experienced by the mobile users in the proposed system is studied by optimizing the offloading decision as well as the allocation of communication and computing resources while satisfying the energy constraints of both mobile users and UAVs. The proposed problem is shown to be a non-convex, mixed-integer nonlinear problem (MINLP) that is intractable. Therefore, the formulated problem is decomposed into three subproblems: i) users tasks offloading decision problem, ii) communication resource allocation problem and iii) UAV-assisted MEC decision problem. Then, the Lagrangian relaxation and alternating direction method of multipliers (ADMM) methods are applied to solve the decomposed problems, alternatively. Simulation results show that the proposed approach reduces the average latency by up to 40.7\% and 4.3\% compared to the greedy and exhaustive search methods.
Radio Resource Allocation in 5G New Radio: A Neural Networks Based Approach)
Nov 13, 2019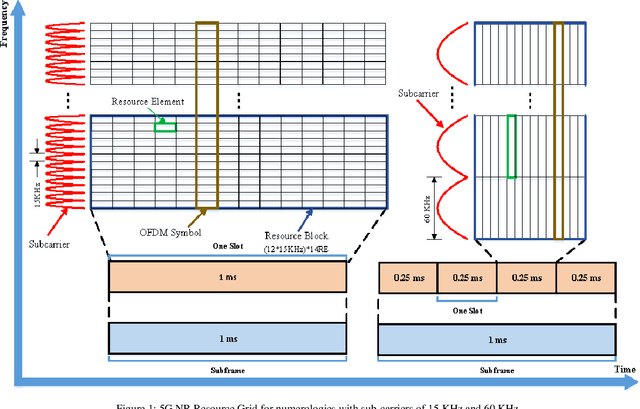
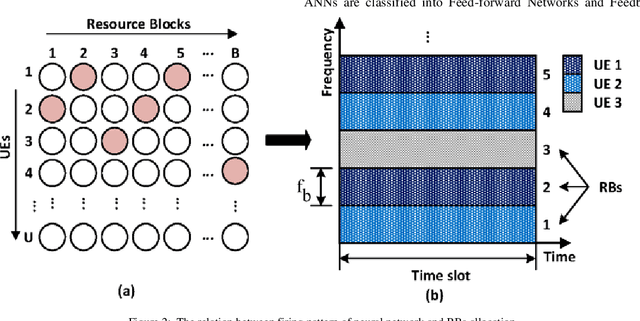
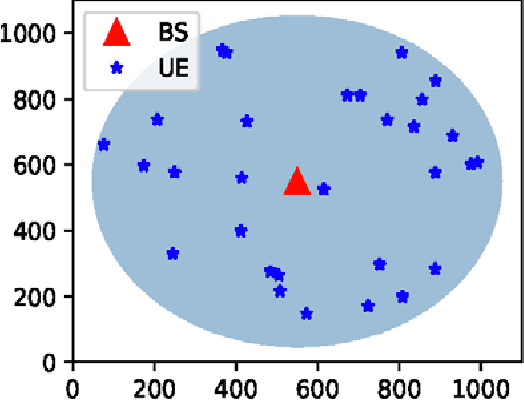
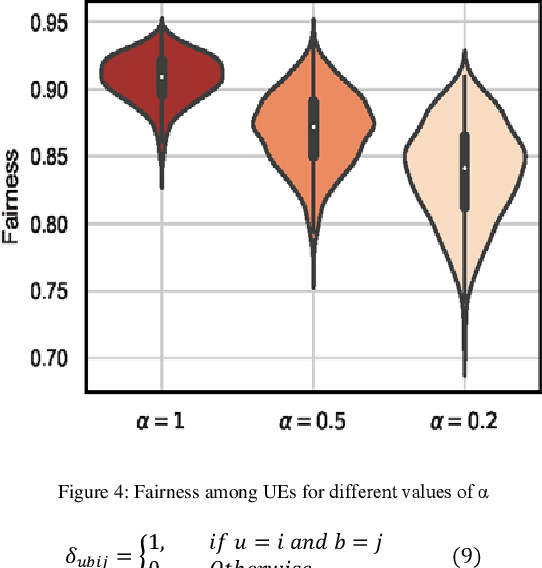
The minimum frequency-time unit that can be allocated to User Equipments (UEs) in the fifth generation (5G) cellular networks is a Resource Block (RB). A RB is a channel composed of a set of OFDM subcarriers for a given time slot duration. 5G New Radio (NR) allows for a large number of block shapes ranging from 15 kHz to 480 kHz. In this paper, we address the problem of RBs allocation to UEs. The RBs are allocated at the beginning of each time slot based on the channel state of each UE. The problem is formulated based on the Generalized Proportional Fair (GPF) scheduling. Then, we model the problem as a 2-Dimension Hopfield Neural Networks (2D-HNN). Finally, in an attempt to solve the problem, the energy function of 2D-HNN is investigated. Simulation results show the efficiency of the proposed approach.
Detecting Features of Tools, Objects, and Actions from Effects in a Robot using Deep Learning
Sep 23, 2018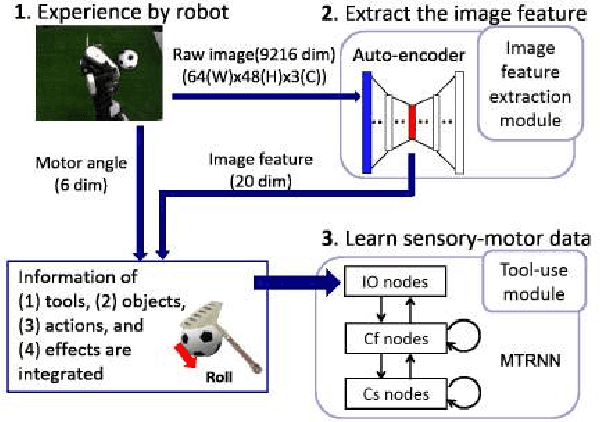
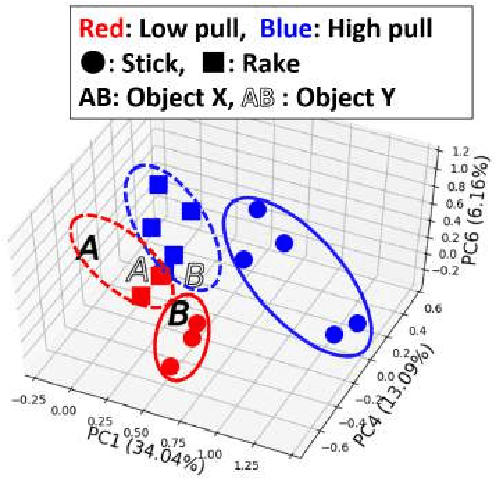
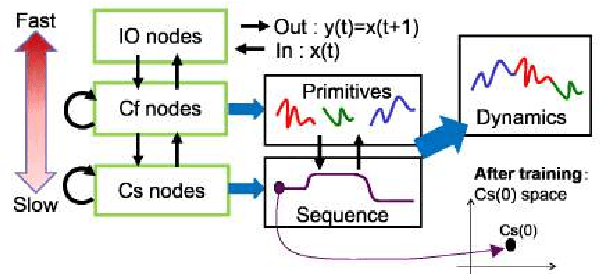
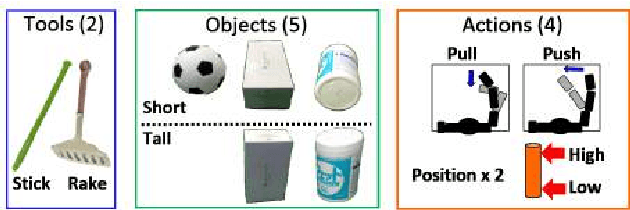
We propose a tool-use model that can detect the features of tools, target objects, and actions from the provided effects of object manipulation. We construct a model that enables robots to manipulate objects with tools, using infant learning as a concept. To realize this, we train sensory-motor data recorded during a tool-use task performed by a robot with deep learning. Experiments include four factors: (1) tools, (2) objects, (3) actions, and (4) effects, which the model considers simultaneously. For evaluation, the robot generates predicted images and motions given information of the effects of using unknown tools and objects. We confirm that the robot is capable of detecting features of tools, objects, and actions by learning the effects and executing the task.