 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReplanning Human-Robot Collaborative Tasks with Vision-Language Models via Semantic and Physical Dual-Correction
Feb 16, 2026Human-Robot Collaboration (HRC) plays an important role in assembly tasks by enabling robots to plan and adjust their motions based on interactive, real-time human instructions. However, such instructions are often linguistically ambiguous and underspecified, making it difficult to generate physically feasible and cooperative robot behaviors. To address this challenge, many studies have applied Vision-Language Models (VLMs) to interpret high-level instructions and generate corresponding actions. Nevertheless, VLM-based approaches still suffer from hallucinated reasoning and an inability to anticipate physical execution failures. To address these challenges, we propose an HRC framework that augments a VLM-based reasoning with a dual-correction mechanism: an internal correction model that verifies logical consistency and task feasibility prior to action execution, and an external correction model that detects and rectifies physical failures through post-execution feedback. Simulation ablation studies demonstrate that the proposed method improves the success rate compared to baselines without correction models. Our real-world experiments in collaborative assembly tasks supported by object fixation or tool preparation by an upper body humanoid robot further confirm the framewor's effectiveness in enabling interactive replanning across different collaborative tasks in response to human instructions, validating its practical feasibility.
Explicit Contact Optimization in Whole-Body Contact-Rich Manipulation
Aug 28, 2024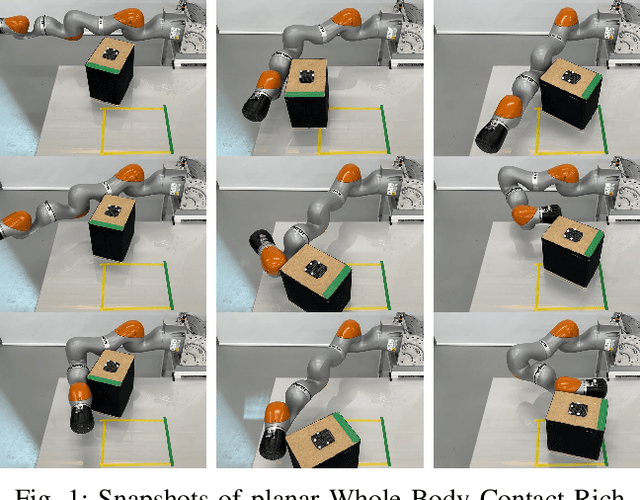
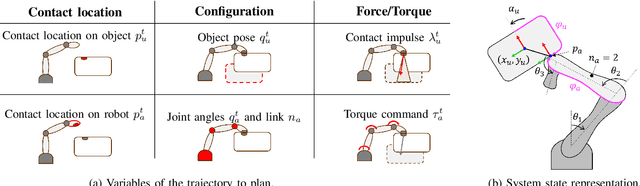
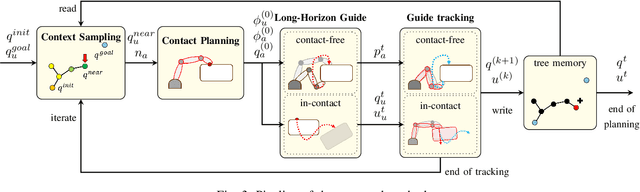
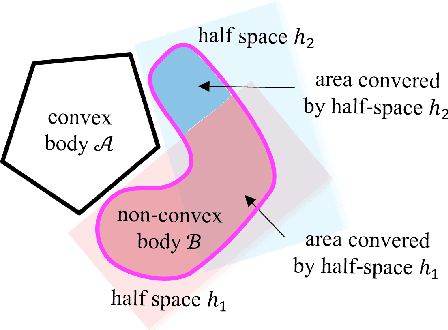
Humans can exploit contacts anywhere on their body surface to manipulate large and heavy items, objects normally out of reach or multiple objects at once. However, such manipulation through contacts using the whole surface of the body remains extremely challenging to achieve on robots. This can be labelled as Whole-Body Contact-Rich Manipulation (WBCRM) problem. In addition to the high-dimensionality of the Contact-Rich Manipulation problem due to the combinatorics of contact modes, admitting contact creation anywhere on the body surface adds complexity, which hinders planning of manipulation within a reasonable time. We address this computational problem by formulating the contact and motion planning of planar WBCRM as hierarchical continuous optimization problems. To enable this formulation, we propose a novel continuous explicit representation of the robot surface, that we believe to be foundational for future research using continuous optimization for WBCRM. Our results demonstrate a significant improvement of convergence, planning time and feasibility - with, on the average, 99% less iterations and 96% reduction in time to find a solution over considered scenarios, without recourse to prone-to-failure trajectory refinement steps.
Dual-arm Motion Generation for Repositioning Care based on Deep Predictive Learning with Somatosensory Attention Mechanism
Jul 18, 2024A versatile robot working in a domestic environment based on a deep neural network (DNN) is currently attracting attention. One of the roles expected for domestic robots is caregiving for a human. In particular, we focus on repositioning care because repositioning plays a fundamental role in supporting the health and quality of life of individuals with limited mobility. However, generating motions of the repositioning care, avoiding applying force to non-target parts and applying appropriate force to target parts, remains challenging. In this study, we proposed a DNN-based architecture using visual and somatosensory attention mechanisms that can generate dual-arm repositioning motions which involve different sequential policies of interaction force; contact-less reaching and contact-based assisting motions. We used the humanoid robot Dry-AIREC, which features the capability to adjust joint impedance dynamically. In the experiment, the repositioning assistance from the supine position to the sitting position was conducted by Dry-AIREC. The trained model, utilizing the proposed architecture, successfully guided the robot's hand to the back of the mannequin without excessive contact force on the mannequin and provided adequate support and appropriate contact for postural adjustment.
Latent Object Characteristics Recognition with Visual to Haptic-Audio Cross-modal Transfer Learning
Mar 15, 2024Recognising the characteristics of objects while a robot handles them is crucial for adjusting motions that ensure stable and efficient interactions with containers. Ahead of realising stable and efficient robot motions for handling/transferring the containers, this work aims to recognise the latent unobservable object characteristics. While vision is commonly used for object recognition by robots, it is ineffective for detecting hidden objects. However, recognising objects indirectly using other sensors is a challenging task. To address this challenge, we propose a cross-modal transfer learning approach from vision to haptic-audio. We initially train the model with vision, directly observing the target object. Subsequently, we transfer the latent space learned from vision to a second module, trained only with haptic-audio and motor data. This transfer learning framework facilitates the representation of object characteristics using indirect sensor data, thereby improving recognition accuracy. For evaluating the recognition accuracy of our proposed learning framework we selected shape, position, and orientation as the object characteristics. Finally, we demonstrate online recognition of both trained and untrained objects using the humanoid robot Nextage Open.
Realtime Motion Generation with Active Perception Using Attention Mechanism for Cooking Robot
Sep 26, 2023



To support humans in their daily lives, robots are required to autonomously learn, adapt to objects and environments, and perform the appropriate actions. We tackled on the task of cooking scrambled eggs using real ingredients, in which the robot needs to perceive the states of the egg and adjust stirring movement in real time, while the egg is heated and the state changes continuously. In previous works, handling changing objects was found to be challenging because sensory information includes dynamical, both important or noisy information, and the modality which should be focused on changes every time, making it difficult to realize both perception and motion generation in real time. We propose a predictive recurrent neural network with an attention mechanism that can weigh the sensor input, distinguishing how important and reliable each modality is, that realize quick and efficient perception and motion generation. The model is trained with learning from the demonstration, and allows the robot to acquire human-like skills. We validated the proposed technique using the robot, Dry-AIREC, and with our learning model, it could perform cooking eggs with unknown ingredients. The robot could change the method of stirring and direction depending on the status of the egg, as in the beginning it stirs in the whole pot, then subsequently, after the egg started being heated, it starts flipping and splitting motion targeting specific areas, although we did not explicitly indicate them.
Few-Shot Learning of Force-Based Motions From Demonstration Through Pre-training of Haptic Representation
Sep 08, 2023



In many contact-rich tasks, force sensing plays an essential role in adapting the motion to the physical properties of the manipulated object. To enable robots to capture the underlying distribution of object properties necessary for generalising learnt manipulation tasks to unseen objects, existing Learning from Demonstration (LfD) approaches require a large number of costly human demonstrations. Our proposed semi-supervised LfD approach decouples the learnt model into an haptic representation encoder and a motion generation decoder. This enables us to pre-train the first using large amount of unsupervised data, easily accessible, while using few-shot LfD to train the second, leveraging the benefits of learning skills from humans. We validate the approach on the wiping task using sponges with different stiffness and surface friction. Our results demonstrate that pre-training significantly improves the ability of the LfD model to recognise physical properties and generate desired wiping motions for unseen sponges, outperforming the LfD method without pre-training. We validate the motion generated by our semi-supervised LfD model on the physical robot hardware using the KUKA iiwa robot arm. We also validate that the haptic representation encoder, pre-trained in simulation, captures the properties of real objects, explaining its contribution to improving the generalisation of the downstream task.
How to select and use tools? : Active Perception of Target Objects Using Multimodal Deep Learning
Jun 04, 2021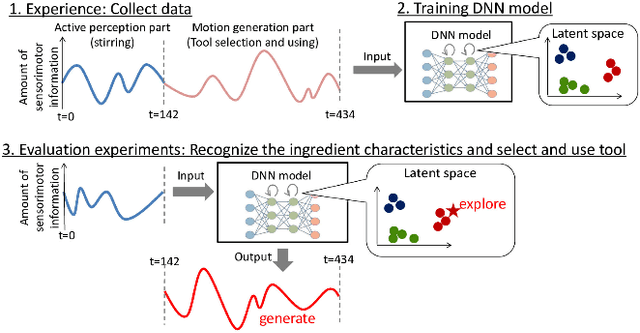
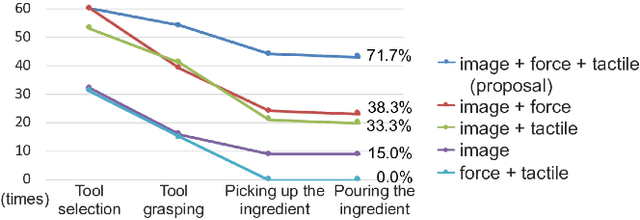

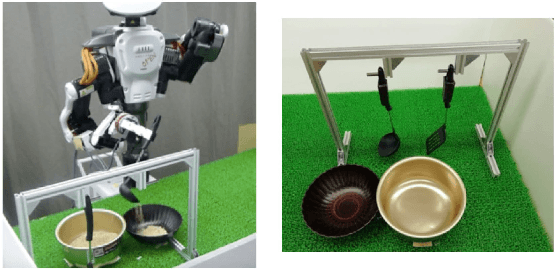
Selection of appropriate tools and use of them when performing daily tasks is a critical function for introducing robots for domestic applications. In previous studies, however, adaptability to target objects was limited, making it difficult to accordingly change tools and adjust actions. To manipulate various objects with tools, robots must both understand tool functions and recognize object characteristics to discern a tool-object-action relation. We focus on active perception using multimodal sensorimotor data while a robot interacts with objects, and allow the robot to recognize their extrinsic and intrinsic characteristics. We construct a deep neural networks (DNN) model that learns to recognize object characteristics, acquires tool-object-action relations, and generates motions for tool selection and handling. As an example tool-use situation, the robot performs an ingredients transfer task, using a turner or ladle to transfer an ingredient from a pot to a bowl. The results confirm that the robot recognizes object characteristics and servings even when the target ingredients are unknown. We also examine the contributions of images, force, and tactile data and show that learning a variety of multimodal information results in rich perception for tool use.
* Best Paper Award of Cognitive Robotics in ICRA2021 IEEE Robotics and Automation Letters 2021, Proceedings of the 2021 International Conference on Robotics and Automation (ICRA 2021), 2021
Detecting Features of Tools, Objects, and Actions from Effects in a Robot using Deep Learning
Sep 23, 2018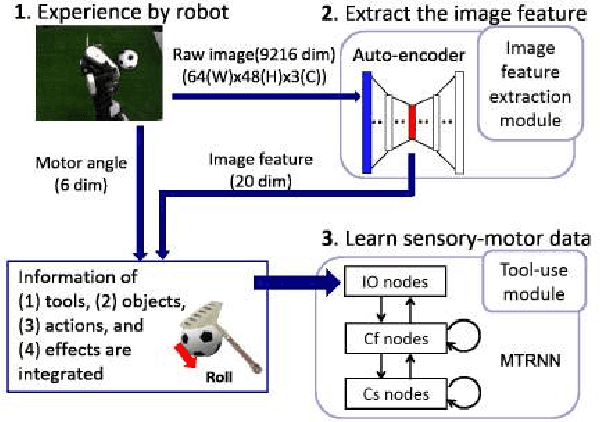
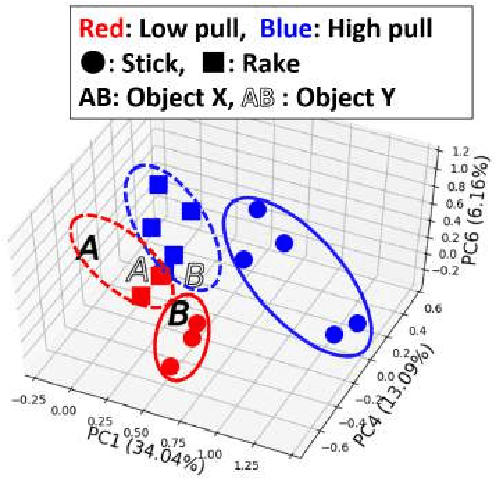
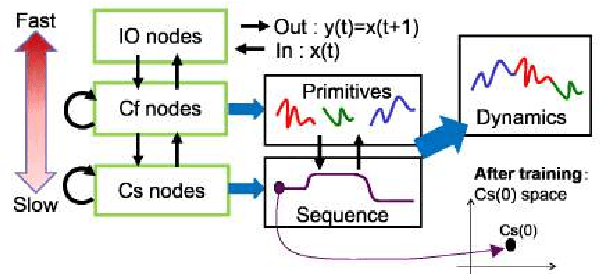
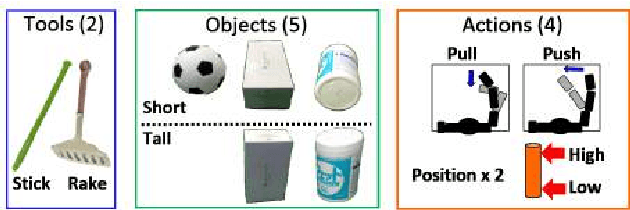
We propose a tool-use model that can detect the features of tools, target objects, and actions from the provided effects of object manipulation. We construct a model that enables robots to manipulate objects with tools, using infant learning as a concept. To realize this, we train sensory-motor data recorded during a tool-use task performed by a robot with deep learning. Experiments include four factors: (1) tools, (2) objects, (3) actions, and (4) effects, which the model considers simultaneously. For evaluation, the robot generates predicted images and motions given information of the effects of using unknown tools and objects. We confirm that the robot is capable of detecting features of tools, objects, and actions by learning the effects and executing the task.