 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-shot transfer of tool-use skills using human demonstrations with proximity and tactile sensing
Jul 17, 2025Tools extend the manipulation abilities of robots, much like they do for humans. Despite human expertise in tool manipulation, teaching robots these skills faces challenges. The complexity arises from the interplay of two simultaneous points of contact: one between the robot and the tool, and another between the tool and the environment. Tactile and proximity sensors play a crucial role in identifying these complex contacts. However, learning tool manipulation using these sensors remains challenging due to limited real-world data and the large sim-to-real gap. To address this, we propose a few-shot tool-use skill transfer framework using multimodal sensing. The framework involves pre-training the base policy to capture contact states common in tool-use skills in simulation and fine-tuning it with human demonstrations collected in the real-world target domain to bridge the domain gap. We validate that this framework enables teaching surface-following tasks using tools with diverse physical and geometric properties with a small number of demonstrations on the Franka Emika robot arm. Our analysis suggests that the robot acquires new tool-use skills by transferring the ability to recognise tool-environment contact relationships from pre-trained to fine-tuned policies. Additionally, combining proximity and tactile sensors enhances the identification of contact states and environmental geometry.
Few-Shot Learning of Force-Based Motions From Demonstration Through Pre-training of Haptic Representation
Sep 08, 2023



In many contact-rich tasks, force sensing plays an essential role in adapting the motion to the physical properties of the manipulated object. To enable robots to capture the underlying distribution of object properties necessary for generalising learnt manipulation tasks to unseen objects, existing Learning from Demonstration (LfD) approaches require a large number of costly human demonstrations. Our proposed semi-supervised LfD approach decouples the learnt model into an haptic representation encoder and a motion generation decoder. This enables us to pre-train the first using large amount of unsupervised data, easily accessible, while using few-shot LfD to train the second, leveraging the benefits of learning skills from humans. We validate the approach on the wiping task using sponges with different stiffness and surface friction. Our results demonstrate that pre-training significantly improves the ability of the LfD model to recognise physical properties and generate desired wiping motions for unseen sponges, outperforming the LfD method without pre-training. We validate the motion generated by our semi-supervised LfD model on the physical robot hardware using the KUKA iiwa robot arm. We also validate that the haptic representation encoder, pre-trained in simulation, captures the properties of real objects, explaining its contribution to improving the generalisation of the downstream task.
Training Humans to Train Robots Dynamic Motor Skills
May 13, 2021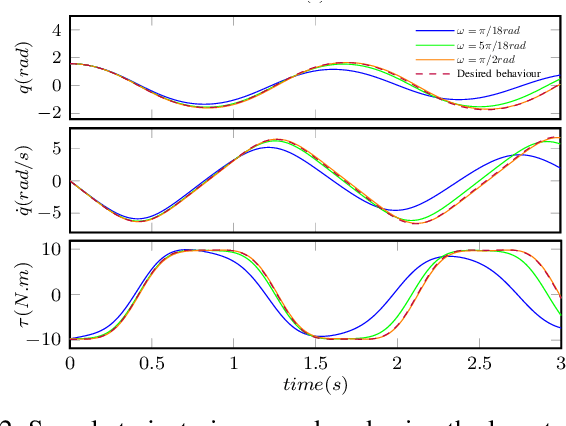

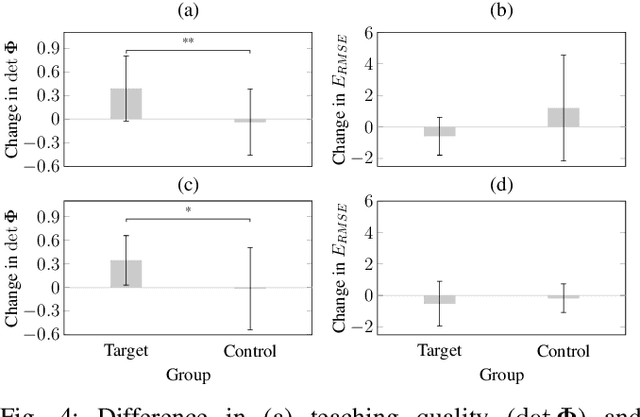
Learning from demonstration (LfD) is commonly considered to be a natural and intuitive way to allow novice users to teach motor skills to robots. However, it is important to acknowledge that the effectiveness of LfD is heavily dependent on the quality of teaching, something that may not be assured with novices. It remains an open question as to the most effective way of guiding demonstrators to produce informative demonstrations beyond ad hoc advice for specific teaching tasks. To this end, this paper investigates the use of machine teaching to derive an index for determining the quality of demonstrations and evaluates its use in guiding and training novices to become better teachers. Experiments with a simple learner robot suggest that guidance and training of teachers through the proposed approach can lead to up to 66.5% decrease in error in the learnt skill.