 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Refine: An Agentic RL Approach for Iterative SPARQL Query Construction
Nov 14, 2025Generating complex, logically-sound SPARQL queries for multi-hop questions remains a critical bottleneck for Knowledge Graph Question Answering, as the brittle nature of one-shot generation by Large Language Models (LLMs) hinders reliable interaction with structured data. Current methods lack the adaptive policies needed to dynamically debug queries based on real-time execution feedback. This paper introduces a novel agentic framework where an LLM learns a resilient policy for the sequential process of iterative SPARQL construction. We show that a compact 3B-parameter model, trained exclusively via outcome-driven Reinforcement Learning (GRPO) without supervised fine-tuning, can learn effective policies for this task, discovering how to systematically recover from execution errors and refine its queries toward a correct answer. On a curated, executable single-answer subset of LC-QuAD 2.0, our agent achieves 49.7\% accuracy post-entity-linking, a significant 17.5 percentage point improvement over the strongest iterative zero-shot baseline. Further analysis reveals that while the agent's capability is driven by RL, its performance is enhanced by an explicit deliberative reasoning step that acts as a cognitive scaffold to improve policy precision. This work presents a generalizable blueprint for teaching agents to master formal, symbolic tools through interaction, bridging the gap between probabilistic LLMs and the structured world of Knowledge Graphs.
Dialogic Learning in Child-Robot Interaction: A Hybrid Approach to Personalized Educational Content Generation
Mar 20, 2025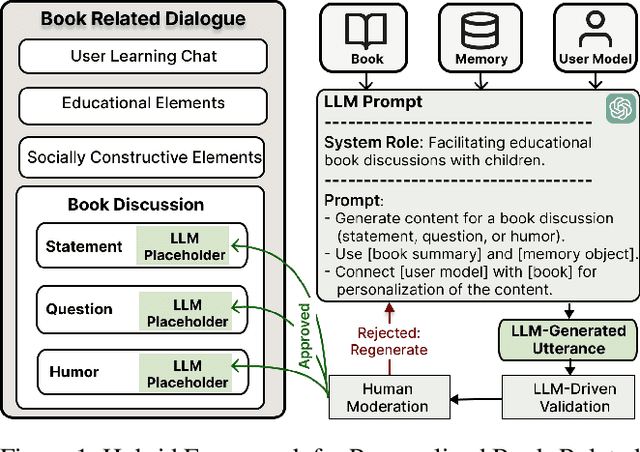
Dialogic learning fosters motivation and deeper understanding in education through purposeful and structured dialogues. Foundational models offer a transformative potential for child-robot interactions, enabling the design of personalized, engaging, and scalable interactions. However, their integration into educational contexts presents challenges in terms of ensuring age-appropriate and safe content and alignment with pedagogical goals. We introduce a hybrid approach to designing personalized educational dialogues in child-robot interactions. By combining rule-based systems with LLMs for selective offline content generation and human validation, the framework ensures educational quality and developmental appropriateness. We illustrate this approach through a project aimed at enhancing reading motivation, in which a robot facilitated book-related dialogues.
Moment&Cross: Next-Generation Real-Time Cross-Domain CTR Prediction for Live-Streaming Recommendation at Kuaishou
Aug 11, 2024



Kuaishou, is one of the largest short-video and live-streaming platform, compared with short-video recommendations, live-streaming recommendation is more complex because of: (1) temporarily-alive to distribution, (2) user may watch for a long time with feedback delay, (3) content is unpredictable and changes over time. Actually, even if a user is interested in the live-streaming author, it still may be an negative watching (e.g., short-view < 3s) since the real-time content is not attractive enough. Therefore, for live-streaming recommendation, there exists a challenging task: how do we recommend the live-streaming at right moment for users? Additionally, our platform's major exposure content is short short-video, and the amount of exposed short-video is 9x more than exposed live-streaming. Thus users will leave more behaviors on short-videos, which leads to a serious data imbalance problem making the live-streaming data could not fully reflect user interests. In such case, there raises another challenging task: how do we utilize users' short-video behaviors to make live-streaming recommendation better?
Safety Control of Service Robots with LLMs and Embodied Knowledge Graphs
May 28, 2024Safety limitations in service robotics across various industries have raised significant concerns about the need for robust mechanisms ensuring that robots adhere to safe practices, thereby preventing actions that might harm humans or cause property damage. Despite advances, including the integration of Knowledge Graphs (KGs) with Large Language Models (LLMs), challenges in ensuring consistent safety in autonomous robot actions persist. In this paper, we propose a novel integration of Large Language Models with Embodied Robotic Control Prompts (ERCPs) and Embodied Knowledge Graphs (EKGs) to enhance the safety framework for service robots. ERCPs are designed as predefined instructions that ensure LLMs generate safe and precise responses. These responses are subsequently validated by EKGs, which provide a comprehensive knowledge base ensuring that the actions of the robot are continuously aligned with safety protocols, thereby promoting safer operational practices in varied contexts. Our experimental setup involved diverse real-world tasks, where robots equipped with our framework demonstrated significantly higher compliance with safety standards compared to traditional methods. This integration fosters secure human-robot interactions and positions our methodology at the forefront of AI-driven safety innovations in service robotics.
PrTransH: Embedding Probabilistic Medical Knowledge from Real World EMR Data
Sep 02, 2019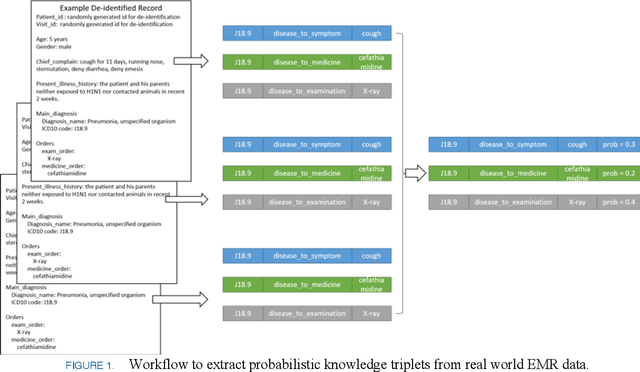
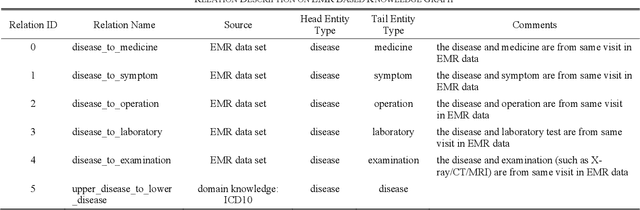
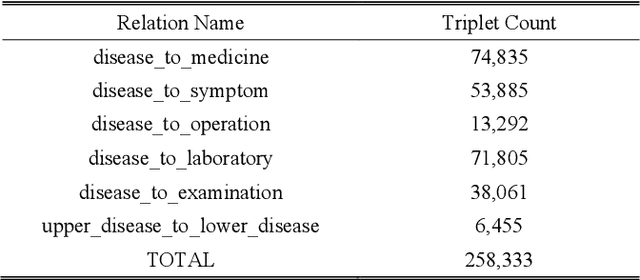
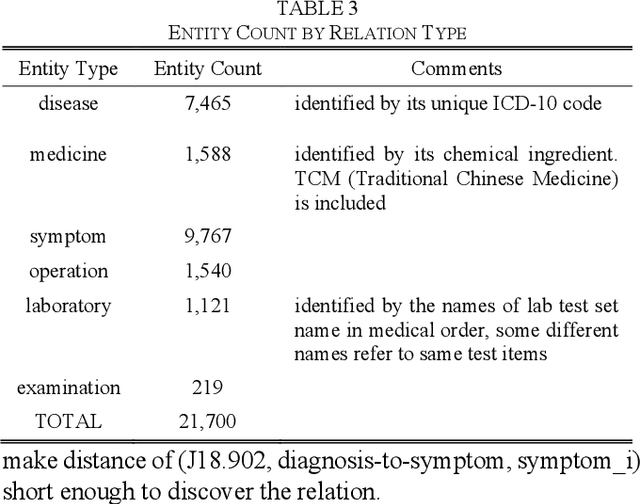
This paper proposes an algorithm named as PrTransH to learn embedding vectors from real world EMR data based medical knowledge. The unique challenge in embedding medical knowledge graph from real world EMR data is that the uncertainty of knowledge triplets blurs the border between "correct triplet" and "wrong triplet", changing the fundamental assumption of many existing algorithms. To address the challenge, some enhancements are made to existing TransH algorithm, including: 1) involve probability of medical knowledge triplet into training objective; 2) replace the margin-based ranking loss with unified loss calculation considering both valid and corrupted triplets; 3) augment training data set with medical background knowledge. Verifications on real world EMR data based medical knowledge graph prove that PrTransH outperforms TransH in link prediction task. To the best of our survey, this paper is the first one to learn and verify knowledge embedding on probabilistic knowledge graphs.