 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoxtral TTS
Mar 26, 2026We introduce Voxtral TTS, an expressive multilingual text-to-speech model that generates natural speech from as little as 3 seconds of reference audio. Voxtral TTS adopts a hybrid architecture that combines auto-regressive generation of semantic speech tokens with flow-matching for acoustic tokens. These tokens are encoded and decoded with Voxtral Codec, a speech tokenizer trained from scratch with a hybrid VQ-FSQ quantization scheme. In human evaluations conducted by native speakers, Voxtral TTS is preferred for multilingual voice cloning due to its naturalness and expressivity, achieving a 68.4\% win rate over ElevenLabs Flash v2.5. We release the model weights under a CC BY-NC license.
Voxtral Realtime
Feb 11, 2026We introduce Voxtral Realtime, a natively streaming automatic speech recognition model that matches offline transcription quality at sub-second latency. Unlike approaches that adapt offline models through chunking or sliding windows, Voxtral Realtime is trained end-to-end for streaming, with explicit alignment between audio and text streams. Our architecture builds on the Delayed Streams Modeling framework, introducing a new causal audio encoder and Ada RMS-Norm for improved delay conditioning. We scale pretraining to a large-scale dataset spanning 13 languages. At a delay of 480ms, Voxtral Realtime achieves performance on par with Whisper, the most widely deployed offline transcription system. We release the model weights under the Apache 2.0 license.
Data Repetition Beats Data Scaling in Long-CoT Supervised Fine-Tuning
Feb 11, 2026Supervised fine-tuning (SFT) on chain-of-thought data is an essential post-training step for reasoning language models. Standard machine learning intuition suggests that training with more unique training samples yields better generalization. Counterintuitively, we show that SFT benefits from repetition: under a fixed update budget, training for more epochs on smaller datasets outperforms single-epoch training on larger datasets. On AIME'24/25 and GPQA benchmarks, Olmo3-7B trained for 128 epochs on 400 samples outperforms the equivalent 1 epoch on 51200 samples by 12-26 percentage points, with no additional catastrophic forgetting. We find that training token accuracy reliably signals when repetition has saturated; improvements from additional epochs plateau at full memorization, a pattern consistent across all settings. These findings provide a practical approach for reasoning SFT, where scaling epochs with token accuracy as a stopping criterion can replace expensive undirected data scaling. We pose the repetition advantage, where full memorization coincides with improved generalization, as a new open problem for the community in understanding the training dynamics of large language models.
Ministral 3
Jan 13, 2026We introduce the Ministral 3 series, a family of parameter-efficient dense language models designed for compute and memory constrained applications, available in three model sizes: 3B, 8B, and 14B parameters. For each model size, we release three variants: a pretrained base model for general-purpose use, an instruction finetuned, and a reasoning model for complex problem-solving. In addition, we present our recipe to derive the Ministral 3 models through Cascade Distillation, an iterative pruning and continued training with distillation technique. Each model comes with image understanding capabilities, all under the Apache 2.0 license.
Voxtral
Jul 17, 2025We present Voxtral Mini and Voxtral Small, two multimodal audio chat models. Voxtral is trained to comprehend both spoken audio and text documents, achieving state-of-the-art performance across a diverse range of audio benchmarks, while preserving strong text capabilities. Voxtral Small outperforms a number of closed-source models, while being small enough to run locally. A 32K context window enables the model to handle audio files up to 40 minutes in duration and long multi-turn conversations. We also contribute three benchmarks for evaluating speech understanding models on knowledge and trivia. Both Voxtral models are released under Apache 2.0 license.
Magistral
Jun 12, 2025



We introduce Magistral, Mistral's first reasoning model and our own scalable reinforcement learning (RL) pipeline. Instead of relying on existing implementations and RL traces distilled from prior models, we follow a ground up approach, relying solely on our own models and infrastructure. Notably, we demonstrate a stack that enabled us to explore the limits of pure RL training of LLMs, present a simple method to force the reasoning language of the model, and show that RL on text data alone maintains most of the initial checkpoint's capabilities. We find that RL on text maintains or improves multimodal understanding, instruction following and function calling. We present Magistral Medium, trained for reasoning on top of Mistral Medium 3 with RL alone, and we open-source Magistral Small (Apache 2.0) which further includes cold-start data from Magistral Medium.
Pixtral 12B
Oct 09, 2024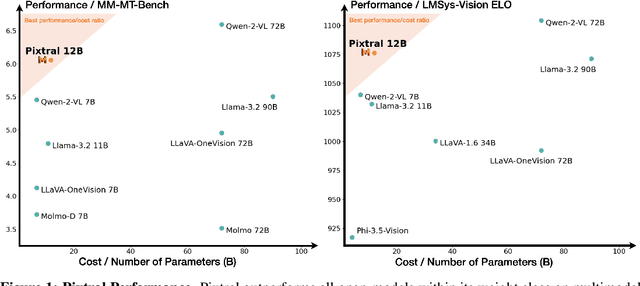
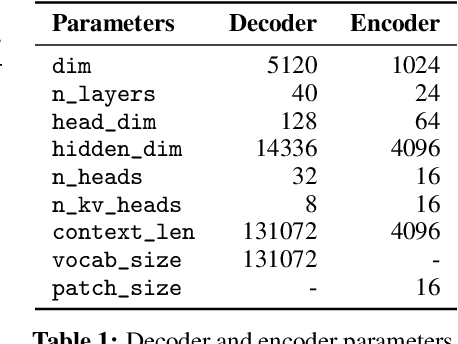
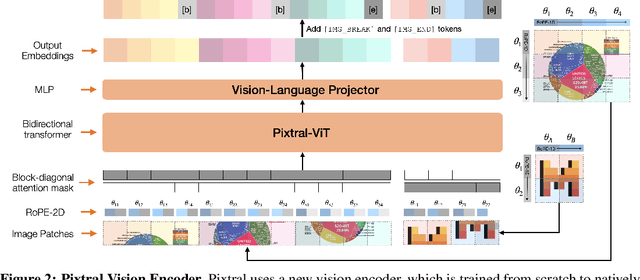
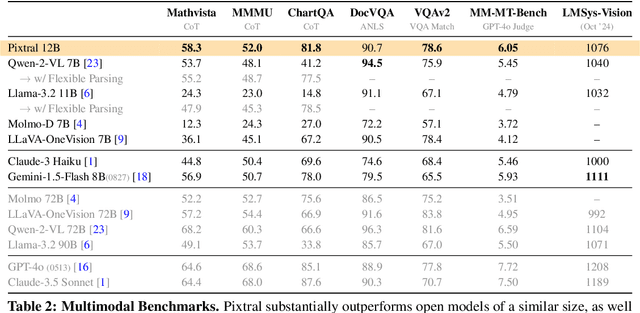
We introduce Pixtral-12B, a 12--billion-parameter multimodal language model. Pixtral-12B is trained to understand both natural images and documents, achieving leading performance on various multimodal benchmarks, surpassing a number of larger models. Unlike many open-source models, Pixtral is also a cutting-edge text model for its size, and does not compromise on natural language performance to excel in multimodal tasks. Pixtral uses a new vision encoder trained from scratch, which allows it to ingest images at their natural resolution and aspect ratio. This gives users flexibility on the number of tokens used to process an image. Pixtral is also able to process any number of images in its long context window of 128K tokens. Pixtral 12B substanially outperforms other open models of similar sizes (Llama-3.2 11B \& Qwen-2-VL 7B). It also outperforms much larger open models like Llama-3.2 90B while being 7x smaller. We further contribute an open-source benchmark, MM-MT-Bench, for evaluating vision-language models in practical scenarios, and provide detailed analysis and code for standardized evaluation protocols for multimodal LLMs. Pixtral-12B is released under Apache 2.0 license.
Dissecting Out-of-Distribution Detection and Open-Set Recognition: A Critical Analysis of Methods and Benchmarks
Aug 30, 2024



Detecting test-time distribution shift has emerged as a key capability for safely deployed machine learning models, with the question being tackled under various guises in recent years. In this paper, we aim to provide a consolidated view of the two largest sub-fields within the community: out-of-distribution (OOD) detection and open-set recognition (OSR). In particular, we aim to provide rigorous empirical analysis of different methods across settings and provide actionable takeaways for practitioners and researchers. Concretely, we make the following contributions: (i) We perform rigorous cross-evaluation between state-of-the-art methods in the OOD detection and OSR settings and identify a strong correlation between the performances of methods for them; (ii) We propose a new, large-scale benchmark setting which we suggest better disentangles the problem tackled by OOD detection and OSR, re-evaluating state-of-the-art OOD detection and OSR methods in this setting; (iii) We surprisingly find that the best performing method on standard benchmarks (Outlier Exposure) struggles when tested at scale, while scoring rules which are sensitive to the deep feature magnitude consistently show promise; and (iv) We conduct empirical analysis to explain these phenomena and highlight directions for future research. Code: https://github.com/Visual-AI/Dissect-OOD-OSR
HiLo: A Learning Framework for Generalized Category Discovery Robust to Domain Shifts
Aug 08, 2024Generalized Category Discovery (GCD) is a challenging task in which, given a partially labelled dataset, models must categorize all unlabelled instances, regardless of whether they come from labelled categories or from new ones. In this paper, we challenge a remaining assumption in this task: that all images share the same domain. Specifically, we introduce a new task and method to handle GCD when the unlabelled data also contains images from different domains to the labelled set. Our proposed `HiLo' networks extract High-level semantic and Low-level domain features, before minimizing the mutual information between the representations. Our intuition is that the clusterings based on domain information and semantic information should be independent. We further extend our method with a specialized domain augmentation tailored for the GCD task, as well as a curriculum learning approach. Finally, we construct a benchmark from corrupted fine-grained datasets as well as a large-scale evaluation on DomainNet with real-world domain shifts, reimplementing a number of GCD baselines in this setting. We demonstrate that HiLo outperforms SoTA category discovery models by a large margin on all evaluations.
SPTNet: An Efficient Alternative Framework for Generalized Category Discovery with Spatial Prompt Tuning
Mar 20, 2024Generalized Category Discovery (GCD) aims to classify unlabelled images from both `seen' and `unseen' classes by transferring knowledge from a set of labelled `seen' class images. A key theme in existing GCD approaches is adapting large-scale pre-trained models for the GCD task. An alternate perspective, however, is to adapt the data representation itself for better alignment with the pre-trained model. As such, in this paper, we introduce a two-stage adaptation approach termed SPTNet, which iteratively optimizes model parameters (i.e., model-finetuning) and data parameters (i.e., prompt learning). Furthermore, we propose a novel spatial prompt tuning method (SPT) which considers the spatial property of image data, enabling the method to better focus on object parts, which can transfer between seen and unseen classes. We thoroughly evaluate our SPTNet on standard benchmarks and demonstrate that our method outperforms existing GCD methods. Notably, we find our method achieves an average accuracy of 61.4% on the SSB, surpassing prior state-of-the-art methods by approximately 10%. The improvement is particularly remarkable as our method yields extra parameters amounting to only 0.117% of those in the backbone architecture. Project page: https://visual-ai.github.io/sptnet.