 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixtral 12B
Oct 09, 2024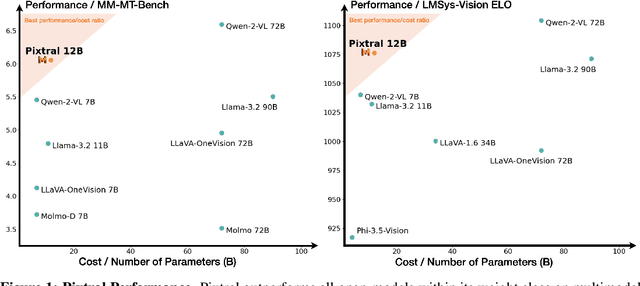
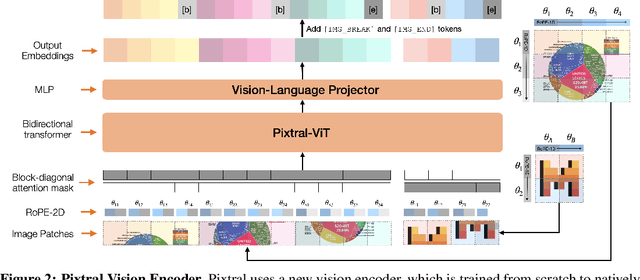
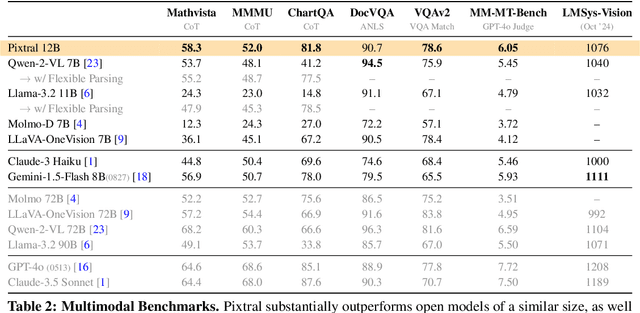
We introduce Pixtral-12B, a 12--billion-parameter multimodal language model. Pixtral-12B is trained to understand both natural images and documents, achieving leading performance on various multimodal benchmarks, surpassing a number of larger models. Unlike many open-source models, Pixtral is also a cutting-edge text model for its size, and does not compromise on natural language performance to excel in multimodal tasks. Pixtral uses a new vision encoder trained from scratch, which allows it to ingest images at their natural resolution and aspect ratio. This gives users flexibility on the number of tokens used to process an image. Pixtral is also able to process any number of images in its long context window of 128K tokens. Pixtral 12B substanially outperforms other open models of similar sizes (Llama-3.2 11B \& Qwen-2-VL 7B). It also outperforms much larger open models like Llama-3.2 90B while being 7x smaller. We further contribute an open-source benchmark, MM-MT-Bench, for evaluating vision-language models in practical scenarios, and provide detailed analysis and code for standardized evaluation protocols for multimodal LLMs. Pixtral-12B is released under Apache 2.0 license.
Plan-Seq-Learn: Language Model Guided RL for Solving Long Horizon Robotics Tasks
May 02, 2024Large Language Models (LLMs) have been shown to be capable of performing high-level planning for long-horizon robotics tasks, yet existing methods require access to a pre-defined skill library (e.g. picking, placing, pulling, pushing, navigating). However, LLM planning does not address how to design or learn those behaviors, which remains challenging particularly in long-horizon settings. Furthermore, for many tasks of interest, the robot needs to be able to adjust its behavior in a fine-grained manner, requiring the agent to be capable of modifying low-level control actions. Can we instead use the internet-scale knowledge from LLMs for high-level policies, guiding reinforcement learning (RL) policies to efficiently solve robotic control tasks online without requiring a pre-determined set of skills? In this paper, we propose Plan-Seq-Learn (PSL): a modular approach that uses motion planning to bridge the gap between abstract language and learned low-level control for solving long-horizon robotics tasks from scratch. We demonstrate that PSL achieves state-of-the-art results on over 25 challenging robotics tasks with up to 10 stages. PSL solves long-horizon tasks from raw visual input spanning four benchmarks at success rates of over 85%, out-performing language-based, classical, and end-to-end approaches. Video results and code at https://mihdalal.github.io/planseqlearn/
No RL, No Simulation: Learning to Navigate without Navigating
Oct 22, 2021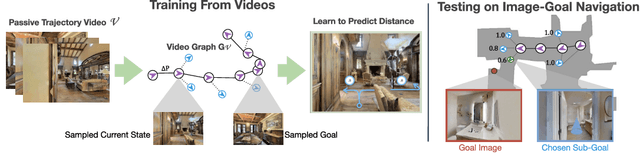
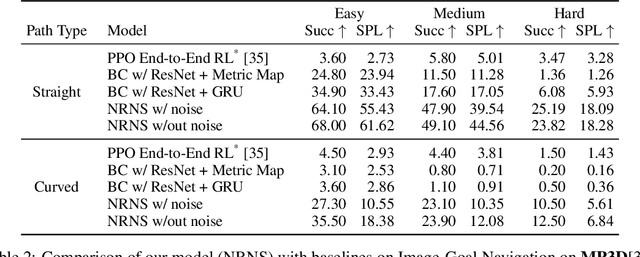
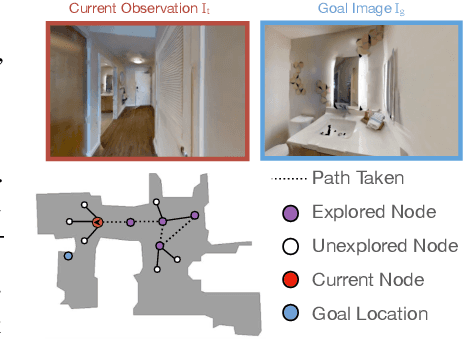
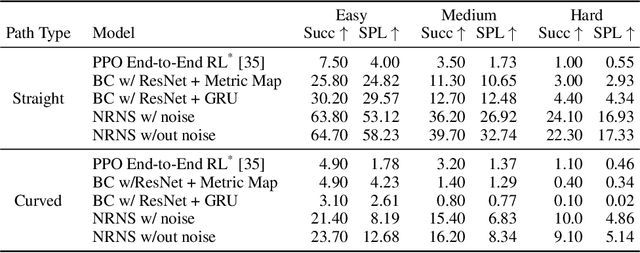
Most prior methods for learning navigation policies require access to simulation environments, as they need online policy interaction and rely on ground-truth maps for rewards. However, building simulators is expensive (requires manual effort for each and every scene) and creates challenges in transferring learned policies to robotic platforms in the real-world, due to the sim-to-real domain gap. In this paper, we pose a simple question: Do we really need active interaction, ground-truth maps or even reinforcement-learning (RL) in order to solve the image-goal navigation task? We propose a self-supervised approach to learn to navigate from only passive videos of roaming. Our approach, No RL, No Simulator (NRNS), is simple and scalable, yet highly effective. NRNS outperforms RL-based formulations by a significant margin. We present NRNS as a strong baseline for any future image-based navigation tasks that use RL or Simulation.
Habitat 2.0: Training Home Assistants to Rearrange their Habitat
Jun 28, 2021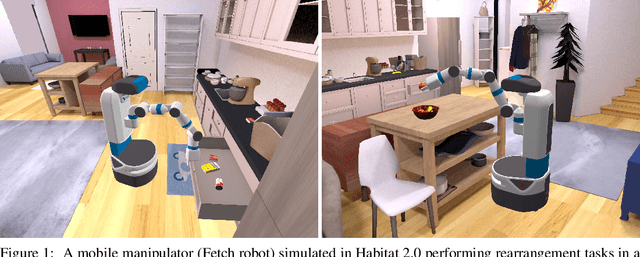
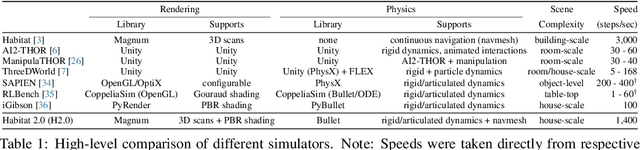
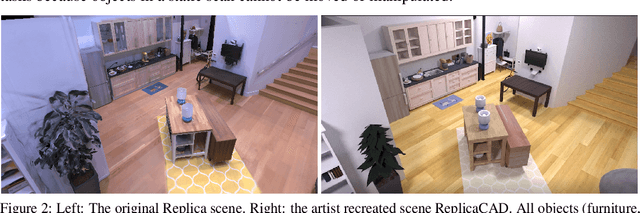
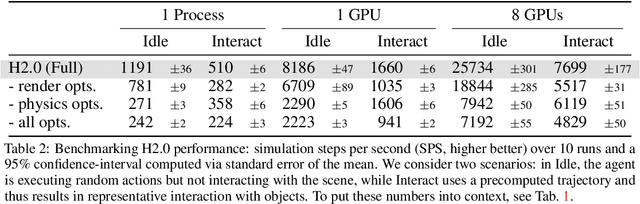
We introduce Habitat 2.0 (H2.0), a simulation platform for training virtual robots in interactive 3D environments and complex physics-enabled scenarios. We make comprehensive contributions to all levels of the embodied AI stack - data, simulation, and benchmark tasks. Specifically, we present: (i) ReplicaCAD: an artist-authored, annotated, reconfigurable 3D dataset of apartments (matching real spaces) with articulated objects (e.g. cabinets and drawers that can open/close); (ii) H2.0: a high-performance physics-enabled 3D simulator with speeds exceeding 25,000 simulation steps per second (850x real-time) on an 8-GPU node, representing 100x speed-ups over prior work; and, (iii) Home Assistant Benchmark (HAB): a suite of common tasks for assistive robots (tidy the house, prepare groceries, set the table) that test a range of mobile manipulation capabilities. These large-scale engineering contributions allow us to systematically compare deep reinforcement learning (RL) at scale and classical sense-plan-act (SPA) pipelines in long-horizon structured tasks, with an emphasis on generalization to new objects, receptacles, and layouts. We find that (1) flat RL policies struggle on HAB compared to hierarchical ones; (2) a hierarchy with independent skills suffers from 'hand-off problems', and (3) SPA pipelines are more brittle than RL policies.