 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideoFlexTok: Flexible-Length Coarse-to-Fine Video Tokenization
Apr 14, 2026Visual tokenizers map high-dimensional raw pixels into a compressed representation for downstream modeling. Beyond compression, tokenizers dictate what information is preserved and how it is organized. A de facto standard approach to video tokenization is to represent a video as a spatiotemporal 3D grid of tokens, each capturing the corresponding local information in the original signal. This requires the downstream model that consumes the tokens, e.g., a text-to-video model, to learn to predict all low-level details "pixel-by-pixel" irrespective of the video's inherent complexity, leading to high learning complexity. We present VideoFlexTok, which represents videos with a variable-length sequence of tokens structured in a coarse-to-fine manner -- where the first tokens (emergently) capture abstract information, such as semantics and motion, and later tokens add fine-grained details. The generative flow decoder enables realistic video reconstructions from any token count. This representation structure allows adapting the token count according to downstream needs and encoding videos longer than the baselines with the same budget. We evaluate VideoFlexTok on class- and text-to-video generative tasks and show that it leads to more efficient training compared to 3D grid tokens, e.g., achieving comparable generation quality (gFVD and ViCLIP Score) with a 5x smaller model (1.1B vs 5.2B). Finally, we demonstrate how VideoFlexTok can enable long video generation without prohibitive computational cost by training a text-to-video model on 10-second 81-frame videos with only 672 tokens, 8x fewer than a comparable 3D grid tokenizer.
How Well Does GPT-4o Understand Vision? Evaluating Multimodal Foundation Models on Standard Computer Vision Tasks
Jul 02, 2025Multimodal foundation models, such as GPT-4o, have recently made remarkable progress, but it is not clear where exactly these models stand in terms of understanding vision. In this paper, we benchmark the performance of popular multimodal foundation models (GPT-4o, o4-mini, Gemini 1.5 Pro and Gemini 2.0 Flash, Claude 3.5 Sonnet, Qwen2-VL, Llama 3.2) on standard computer vision tasks (semantic segmentation, object detection, image classification, depth and surface normal prediction) using established datasets (e.g., COCO, ImageNet and its variants, etc). The main challenges to performing this are: 1) most models are trained to output text and cannot natively express versatile domains, such as segments or 3D geometry, and 2) many leading models are proprietary and accessible only at an API level, i.e., there is no weight access to adapt them. We address these challenges by translating standard vision tasks into equivalent text-promptable and API-compatible tasks via prompt chaining to create a standardized benchmarking framework. We observe that 1) the models are not close to the state-of-the-art specialist models at any task. However, 2) they are respectable generalists; this is remarkable as they are presumably trained on primarily image-text-based tasks. 3) They perform semantic tasks notably better than geometric ones. 4) While the prompt-chaining techniques affect performance, better models exhibit less sensitivity to prompt variations. 5) GPT-4o performs the best among non-reasoning models, securing the top position in 4 out of 6 tasks, 6) reasoning models, e.g. o3, show improvements in geometric tasks, and 7) a preliminary analysis of models with native image generation, like the latest GPT-4o, shows they exhibit quirks like hallucinations and spatial misalignments.
FlexTok: Resampling Images into 1D Token Sequences of Flexible Length
Feb 19, 2025Image tokenization has enabled major advances in autoregressive image generation by providing compressed, discrete representations that are more efficient to process than raw pixels. While traditional approaches use 2D grid tokenization, recent methods like TiTok have shown that 1D tokenization can achieve high generation quality by eliminating grid redundancies. However, these methods typically use a fixed number of tokens and thus cannot adapt to an image's inherent complexity. We introduce FlexTok, a tokenizer that projects 2D images into variable-length, ordered 1D token sequences. For example, a 256x256 image can be resampled into anywhere from 1 to 256 discrete tokens, hierarchically and semantically compressing its information. By training a rectified flow model as the decoder and using nested dropout, FlexTok produces plausible reconstructions regardless of the chosen token sequence length. We evaluate our approach in an autoregressive generation setting using a simple GPT-style Transformer. On ImageNet, this approach achieves an FID<2 across 8 to 128 tokens, outperforming TiTok and matching state-of-the-art methods with far fewer tokens. We further extend the model to support to text-conditioned image generation and examine how FlexTok relates to traditional 2D tokenization. A key finding is that FlexTok enables next-token prediction to describe images in a coarse-to-fine "visual vocabulary", and that the number of tokens to generate depends on the complexity of the generation task.
ViPer: Visual Personalization of Generative Models via Individual Preference Learning
Jul 24, 2024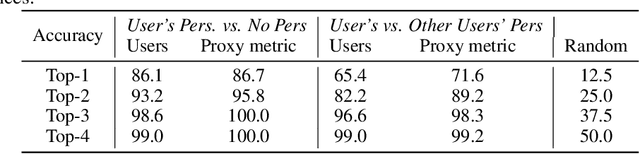

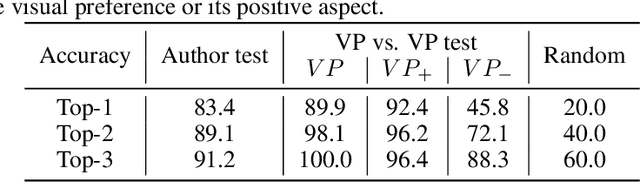
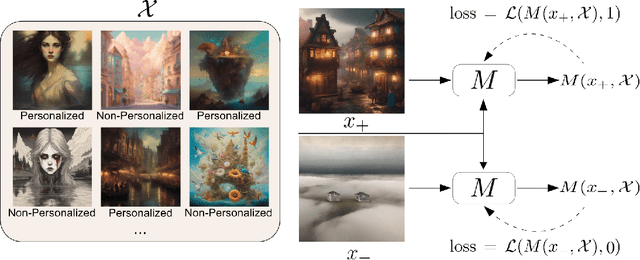
Different users find different images generated for the same prompt desirable. This gives rise to personalized image generation which involves creating images aligned with an individual's visual preference. Current generative models are, however, unpersonalized, as they are tuned to produce outputs that appeal to a broad audience. Using them to generate images aligned with individual users relies on iterative manual prompt engineering by the user which is inefficient and undesirable. We propose to personalize the image generation process by first capturing the generic preferences of the user in a one-time process by inviting them to comment on a small selection of images, explaining why they like or dislike each. Based on these comments, we infer a user's structured liked and disliked visual attributes, i.e., their visual preference, using a large language model. These attributes are used to guide a text-to-image model toward producing images that are tuned towards the individual user's visual preference. Through a series of user studies and large language model guided evaluations, we demonstrate that the proposed method results in generations that are well aligned with individual users' visual preferences.
4M-21: An Any-to-Any Vision Model for Tens of Tasks and Modalities
Jun 14, 2024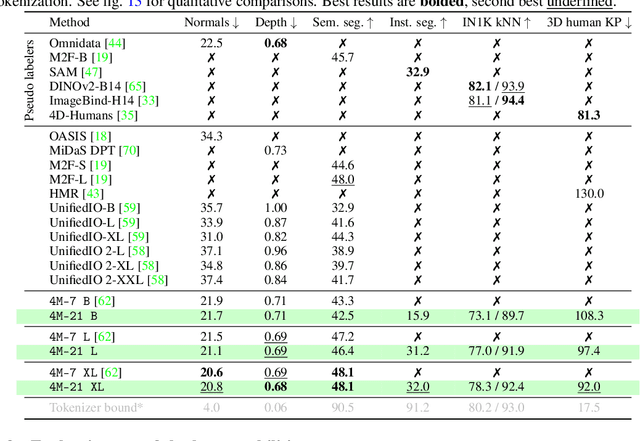
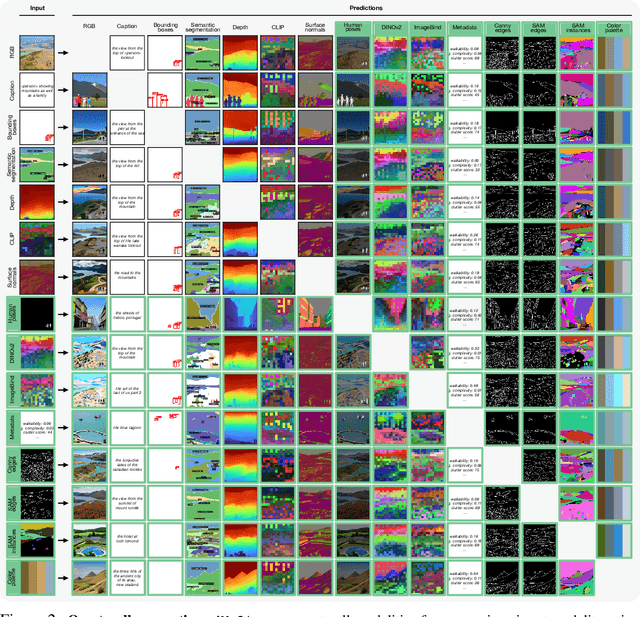
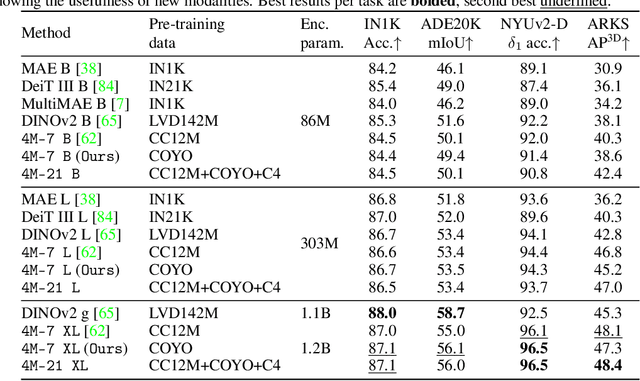
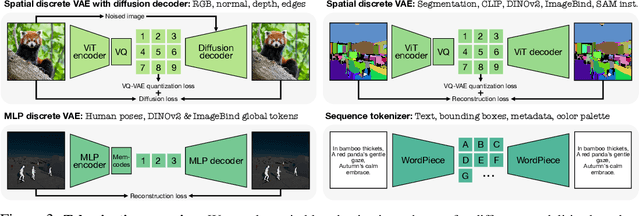
Current multimodal and multitask foundation models like 4M or UnifiedIO show promising results, but in practice their out-of-the-box abilities to accept diverse inputs and perform diverse tasks are limited by the (usually rather small) number of modalities and tasks they are trained on. In this paper, we expand upon the capabilities of them by training a single model on tens of highly diverse modalities and by performing co-training on large-scale multimodal datasets and text corpora. This includes training on several semantic and geometric modalities, feature maps from recent state of the art models like DINOv2 and ImageBind, pseudo labels of specialist models like SAM and 4DHumans, and a range of new modalities that allow for novel ways to interact with the model and steer the generation, for example image metadata or color palettes. A crucial step in this process is performing discrete tokenization on various modalities, whether they are image-like, neural network feature maps, vectors, structured data like instance segmentation or human poses, or data that can be represented as text. Through this, we expand on the out-of-the-box capabilities of multimodal models and specifically show the possibility of training one model to solve at least 3x more tasks/modalities than existing ones and doing so without a loss in performance. This enables more fine-grained and controllable multimodal generation capabilities and allows us to study the distillation of models trained on diverse data and objectives into a unified model. We successfully scale the training to a three billion parameter model using tens of modalities and different datasets. The resulting models and training code are open sourced at 4m.epfl.ch.
4M: Massively Multimodal Masked Modeling
Dec 11, 2023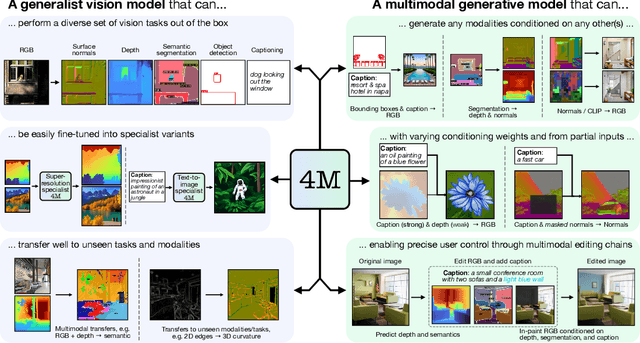

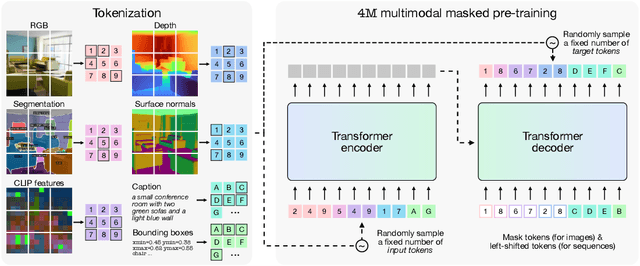

Current machine learning models for vision are often highly specialized and limited to a single modality and task. In contrast, recent large language models exhibit a wide range of capabilities, hinting at a possibility for similarly versatile models in computer vision. In this paper, we take a step in this direction and propose a multimodal training scheme called 4M. It consists of training a single unified Transformer encoder-decoder using a masked modeling objective across a wide range of input/output modalities - including text, images, geometric, and semantic modalities, as well as neural network feature maps. 4M achieves scalability by unifying the representation space of all modalities through mapping them into discrete tokens and performing multimodal masked modeling on a small randomized subset of tokens. 4M leads to models that exhibit several key capabilities: (1) they can perform a diverse set of vision tasks out of the box, (2) they excel when fine-tuned for unseen downstream tasks or new input modalities, and (3) they can function as a generative model that can be conditioned on arbitrary modalities, enabling a wide variety of expressive multimodal editing capabilities with remarkable flexibility. Through experimental analyses, we demonstrate the potential of 4M for training versatile and scalable foundation models for vision tasks, setting the stage for further exploration in multimodal learning for vision and other domains.
Modality-invariant Visual Odometry for Embodied Vision
Apr 29, 2023



Effectively localizing an agent in a realistic, noisy setting is crucial for many embodied vision tasks. Visual Odometry (VO) is a practical substitute for unreliable GPS and compass sensors, especially in indoor environments. While SLAM-based methods show a solid performance without large data requirements, they are less flexible and robust w.r.t. to noise and changes in the sensor suite compared to learning-based approaches. Recent deep VO models, however, limit themselves to a fixed set of input modalities, e.g., RGB and depth, while training on millions of samples. When sensors fail, sensor suites change, or modalities are intentionally looped out due to available resources, e.g., power consumption, the models fail catastrophically. Furthermore, training these models from scratch is even more expensive without simulator access or suitable existing models that can be fine-tuned. While such scenarios get mostly ignored in simulation, they commonly hinder a model's reusability in real-world applications. We propose a Transformer-based modality-invariant VO approach that can deal with diverse or changing sensor suites of navigation agents. Our model outperforms previous methods while training on only a fraction of the data. We hope this method opens the door to a broader range of real-world applications that can benefit from flexible and learned VO models.
MultiMAE: Multi-modal Multi-task Masked Autoencoders
Apr 04, 2022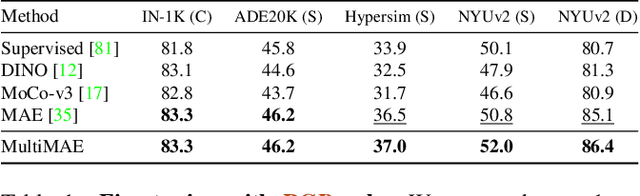
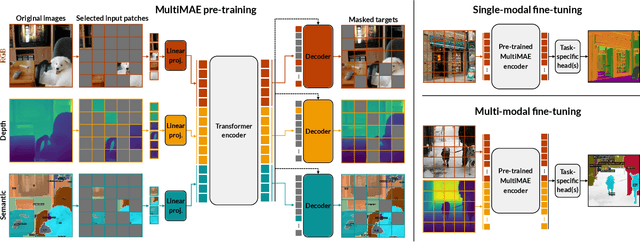
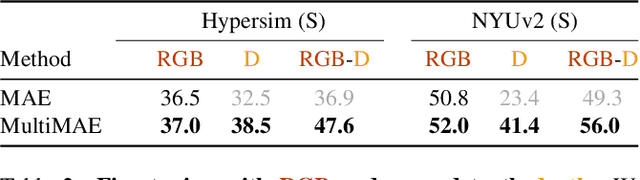
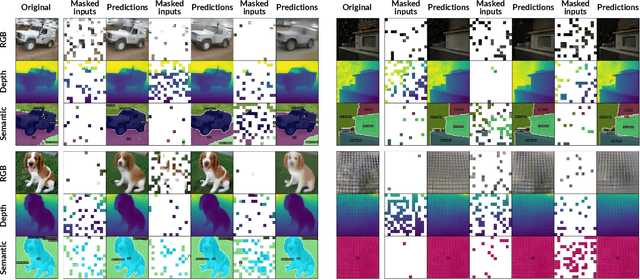
We propose a pre-training strategy called Multi-modal Multi-task Masked Autoencoders (MultiMAE). It differs from standard Masked Autoencoding in two key aspects: I) it can optionally accept additional modalities of information in the input besides the RGB image (hence "multi-modal"), and II) its training objective accordingly includes predicting multiple outputs besides the RGB image (hence "multi-task"). We make use of masking (across image patches and input modalities) to make training MultiMAE tractable as well as to ensure cross-modality predictive coding is indeed learned by the network. We show this pre-training strategy leads to a flexible, simple, and efficient framework with improved transfer results to downstream tasks. In particular, the same exact pre-trained network can be flexibly used when additional information besides RGB images is available or when no information other than RGB is available - in all configurations yielding competitive to or significantly better results than the baselines. To avoid needing training datasets with multiple modalities and tasks, we train MultiMAE entirely using pseudo labeling, which makes the framework widely applicable to any RGB dataset. The experiments are performed on multiple transfer tasks (image classification, semantic segmentation, depth estimation) and datasets (ImageNet, ADE20K, Taskonomy, Hypersim, NYUv2). The results show an intriguingly impressive capability by the model in cross-modal/task predictive coding and transfer.
Omnidata: A Scalable Pipeline for Making Multi-Task Mid-Level Vision Datasets from 3D Scans
Oct 11, 2021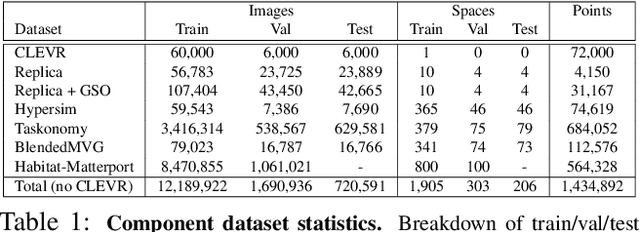
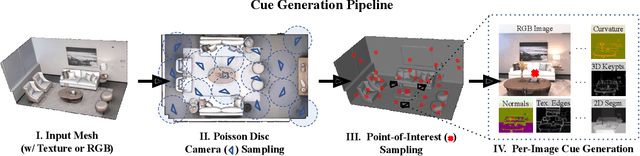
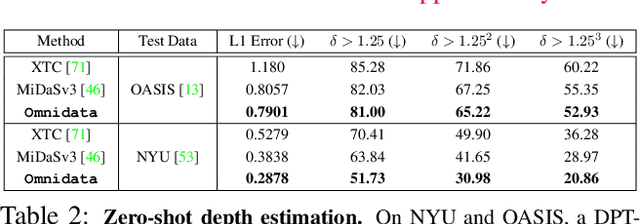

This paper introduces a pipeline to parametrically sample and render multi-task vision datasets from comprehensive 3D scans from the real world. Changing the sampling parameters allows one to "steer" the generated datasets to emphasize specific information. In addition to enabling interesting lines of research, we show the tooling and generated data suffice to train robust vision models. Common architectures trained on a generated starter dataset reached state-of-the-art performance on multiple common vision tasks and benchmarks, despite having seen no benchmark or non-pipeline data. The depth estimation network outperforms MiDaS and the surface normal estimation network is the first to achieve human-level performance for in-the-wild surface normal estimation -- at least according to one metric on the OASIS benchmark. The Dockerized pipeline with CLI, the (mostly python) code, PyTorch dataloaders for the generated data, the generated starter dataset, download scripts and other utilities are available through our project website, https://omnidata.vision.
Training Binary Neural Networks using the Bayesian Learning Rule
Mar 10, 2020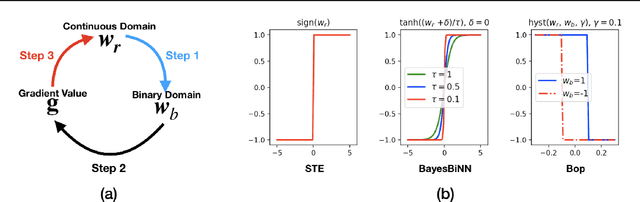

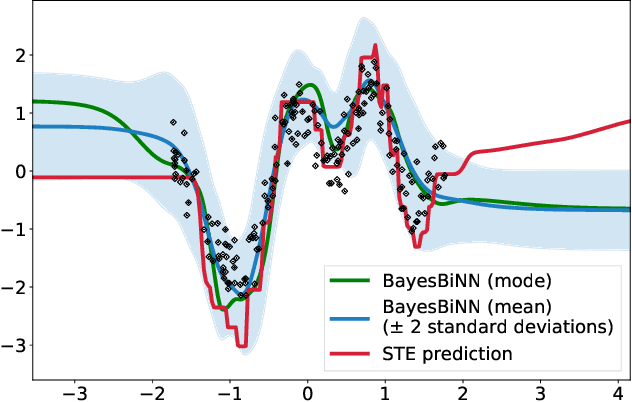
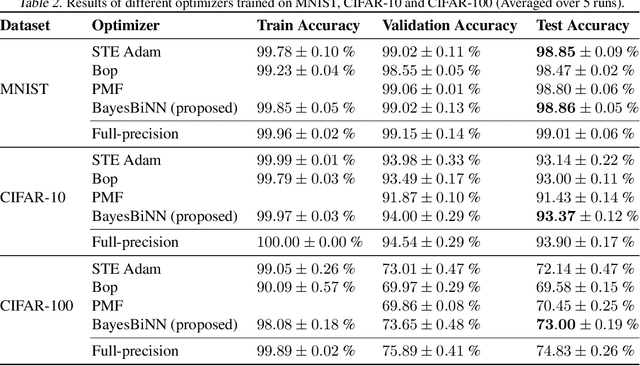
Neural networks with binary weights are computation-efficient and hardware-friendly, but their training is challenging because it involves a discrete optimization problem. Surprisingly, ignoring the discrete nature of the problem and using gradient-based methods, such as Straight-Through Estimator, still works well in practice. This raises the question: are there principled approaches which justify such methods? In this paper, we propose such an approach using the Bayesian learning rule. The rule, when applied to estimate a Bernoulli distribution over the binary weights, results in an algorithm which justifies some of the algorithmic choices made by the previous approaches. The algorithm not only obtains state-of-the-art performance, but also enables uncertainty estimation for continual learning to avoid catastrophic forgetting. Our work provides a principled approach for training binary neural networks which justifies and extends existing approaches.