 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWater-Filling is Universally Minimax Optimal
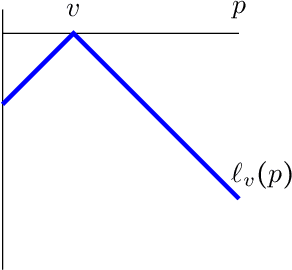
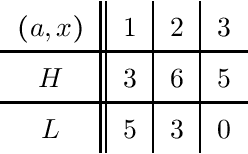
Mar 27, 2026Allocation of dynamically-arriving (i.e., online) divisible resources among a set of offline agents is a fundamental problem, with applications to online marketplaces, scheduling, portfolio selection, signal processing, and many other areas. The water-filling algorithm, which allocates an incoming resource to maximize the minimum load of compatible agents, is ubiquitous in many of these applications whenever the underlying objectives prefer more balanced solutions; however, the analysis and guarantees differ across settings. We provide a justification for the widespread use of water-filling by showing that it is a universally minimax optimal policy in a strong sense. Formally, our main result implies that water-filling is minimax optimal for a large class of objectives -- including both Schur-concave maximization and Schur-convex minimization -- under $α$-regret and competitive ratio measures. This optimality holds for every fixed tuple of agents and resource counts. Remarkably, water-filling achieves these guarantees as a myopic policy, remaining entirely agnostic to the objective function, agent count, and resource availability. Our techniques notably depart from the popular primal-dual analysis of online algorithms, and instead develop a novel way to apply the theory of majorization in online settings to achieve universality guarantees.
Oracle-efficient Hybrid Learning with Constrained Adversaries
Mar 04, 2026The Hybrid Online Learning Problem, where features are drawn i.i.d. from an unknown distribution but labels are generated adversarially, is a well-motivated setting positioned between statistical and fully-adversarial online learning. Prior work has presented a dichotomy: algorithms that are statistically-optimal, but computationally intractable (Wu et al., 2023), and algorithms that are computationally-efficient (given an ERM oracle), but statistically-suboptimal (Wu et al., 2024). This paper takes a significant step towards achieving statistical optimality and computational efficiency simultaneously in the Hybrid Learning setting. To do so, we consider a structured setting, where the Adversary is constrained to pick labels from an expressive, but fixed, class of functions $R$. Our main result is a new learning algorithm, which runs efficiently given an ERM oracle and obtains regret scaling with the Rademacher complexity of a class derived from the Learner's hypothesis class $H$ and the Adversary's label class $R$. As a key corollary, we give an oracle-efficient algorithm for computing equilibria in stochastic zero-sum games when action sets may be high-dimensional but the payoff function exhibits a type of low-dimensional structure. Technically, we develop a number of tools for the design and analysis of our learning algorithm, including a novel Frank-Wolfe reduction with "truncated entropy regularizer" and a new tail bound for sums of "hybrid" martingale difference sequences.
Accelerating AllReduce with a Persistent Straggler
May 29, 2025Distributed machine learning workloads use data and tensor parallelism for training and inference, both of which rely on the AllReduce collective to synchronize gradients or activations. However, bulk-synchronous AllReduce algorithms can be delayed by a persistent straggler that is slower to reach the synchronization barrier required to begin the collective. To address this challenge, we propose StragglAR: an AllReduce algorithm that accelerates distributed training and inference in the presence of persistent stragglers. StragglAR implements a ReduceScatter among the remaining GPUs during the straggler-induced delay, and then executes a novel collective algorithm to complete the AllReduce once the straggler reaches the synchronization barrier. StragglAR achieves a 2x theoretical speedup over popular bandwidth-efficient AllReduce algorithms (e.g., Ring) for large GPU clusters with persistent stragglers. On an 8-GPU server, our implementation of StragglAR yields a 22% speedup over state-of-the-art AllReduce algorithms.
Full Swap Regret and Discretized Calibration
Feb 13, 2025We study the problem of minimizing swap regret in structured normal-form games. Players have a very large (potentially infinite) number of pure actions, but each action has an embedding into $d$-dimensional space and payoffs are given by bilinear functions of these embeddings. We provide an efficient learning algorithm for this setting that incurs at most $\tilde{O}(T^{(d+1)/(d+3)})$ swap regret after $T$ rounds. To achieve this, we introduce a new online learning problem we call \emph{full swap regret minimization}. In this problem, a learner repeatedly takes a (randomized) action in a bounded convex $d$-dimensional action set $\mathcal{K}$ and then receives a loss from the adversary, with the goal of minimizing their regret with respect to the \emph{worst-case} swap function mapping $\mathcal{K}$ to $\mathcal{K}$. For varied assumptions about the convexity and smoothness of the loss functions, we design algorithms with full swap regret bounds ranging from $O(T^{d/(d+2)})$ to $O(T^{(d+1)/(d+2)})$. Finally, we apply these tools to the problem of online forecasting to minimize calibration error, showing that several notions of calibration can be viewed as specific instances of full swap regret. In particular, we design efficient algorithms for online forecasting that guarantee at most $O(T^{1/3})$ $\ell_2$-calibration error and $O(\max(\sqrt{\epsilon T}, T^{1/3}))$ \emph{discretized-calibration} error (when the forecaster is restricted to predicting multiples of $\epsilon$).
Near-Optimal Algorithms for Omniprediction
Jan 30, 2025Omnipredictors are simple prediction functions that encode loss-minimizing predictions with respect to a hypothesis class $\mathcal{H}$, simultaneously for every loss function within a class of losses $\mathcal{L}$. In this work, we give near-optimal learning algorithms for omniprediction, in both the online and offline settings. To begin, we give an oracle-efficient online learning algorithm that acheives $(\mathcal{L},\mathcal{H})$-omniprediction with $\tilde{O}(\sqrt{T \log |\mathcal{H}|})$ regret for any class of Lipschitz loss functions $\mathcal{L} \subseteq \mathcal{L}_\mathrm{Lip}$. Quite surprisingly, this regret bound matches the optimal regret for \emph{minimization of a single loss function} (up to a $\sqrt{\log(T)}$ factor). Given this online algorithm, we develop an online-to-offline conversion that achieves near-optimal complexity across a number of measures. In particular, for all bounded loss functions within the class of Bounded Variation losses $\mathcal{L}_\mathrm{BV}$ (which include all convex, all Lipschitz, and all proper losses) and any (possibly-infinite) $\mathcal{H}$, we obtain an offline learning algorithm that, leveraging an (offline) ERM oracle and $m$ samples from $\mathcal{D}$, returns an efficient $(\mathcal{L}_{\mathrm{BV}},\mathcal{H},\varepsilon(m))$-omnipredictor for $\varepsilon(m)$ scaling near-linearly in the Rademacher complexity of $\mathrm{Th} \circ \mathcal{H}$.
Learning in Budgeted Auctions with Spacing Objectives
Nov 07, 2024In many repeated auction settings, participants care not only about how frequently they win but also how their winnings are distributed over time. This problem arises in various practical domains where avoiding congested demand is crucial, such as online retail sales and compute services, as well as in advertising campaigns that require sustained visibility over time. We introduce a simple model of this phenomenon, modeling it as a budgeted auction where the value of a win is a concave function of the time since the last win. This implies that for a given number of wins, even spacing over time is optimal. We also extend our model and results to the case when not all wins result in "conversions" (realization of actual gains), and the probability of conversion depends on a context. The goal is to maximize and evenly space conversions rather than just wins. We study the optimal policies for this setting in second-price auctions and offer learning algorithms for the bidders that achieve low regret against the optimal bidding policy in a Bayesian online setting. Our main result is a computationally efficient online learning algorithm that achieves $\tilde O(\sqrt T)$ regret. We achieve this by showing that an infinite-horizon Markov decision process (MDP) with the budget constraint in expectation is essentially equivalent to our problem, even when limiting that MDP to a very small number of states. The algorithm achieves low regret by learning a bidding policy that chooses bids as a function of the context and the system's state, which will be the time elapsed since the last win (or conversion). We show that state-independent strategies incur linear regret even without uncertainty of conversions. We complement this by showing that there are state-independent strategies that, while still having linear regret, achieve a $(1-\frac 1 e)$ approximation to the optimal reward.
Improved bounds for calibration via stronger sign preservation games
Jun 19, 2024A set of probabilistic forecasts is calibrated if each prediction of the forecaster closely approximates the empirical distribution of outcomes on the subset of timesteps where that prediction was made. We study the fundamental problem of online calibrated forecasting of binary sequences, which was initially studied by Foster & Vohra (1998). They derived an algorithm with $O(T^{2/3})$ calibration error after $T$ time steps, and showed a lower bound of $\Omega(T^{1/2})$. These bounds remained stagnant for two decades, until Qiao & Valiant (2021) improved the lower bound to $\Omega(T^{0.528})$ by introducing a combinatorial game called sign preservation and showing that lower bounds for this game imply lower bounds for calibration. We introduce a strengthening of Qiao & Valiant's game that we call sign preservation with reuse (SPR). We prove that the relationship between SPR and calibrated forecasting is bidirectional: not only do lower bounds for SPR translate into lower bounds for calibration, but algorithms for SPR also translate into new algorithms for calibrated forecasting. In particular, any strategy that improves the trivial upper bound for the value of the SPR game would imply a forecasting algorithm with calibration error exponent less than 2/3, improving Foster & Vohra's upper bound for the first time. Using similar ideas, we then prove a slightly stronger lower bound than that of Qiao & Valiant, namely $\Omega(T^{0.54389})$. Our lower bound is obtained by an oblivious adversary, marking the first $\omega(T^{1/2})$ calibration lower bound for oblivious adversaries.
Faster Recalibration of an Online Predictor via Approachability
Oct 25, 2023Predictive models in ML need to be trustworthy and reliable, which often at the very least means outputting calibrated probabilities. This can be particularly difficult to guarantee in the online prediction setting when the outcome sequence can be generated adversarially. In this paper we introduce a technique using Blackwell's approachability theorem for taking an online predictive model which might not be calibrated and transforming its predictions to calibrated predictions without much increase to the loss of the original model. Our proposed algorithm achieves calibration and accuracy at a faster rate than existing techniques arXiv:1607.03594 and is the first algorithm to offer a flexible tradeoff between calibration error and accuracy in the online setting. We demonstrate this by characterizing the space of jointly achievable calibration and regret using our technique.
U-Calibration: Forecasting for an Unknown Agent
Jun 30, 2023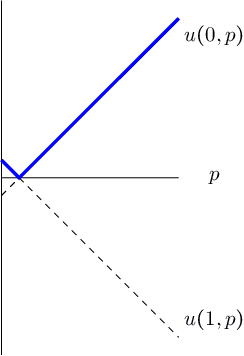

We consider the problem of evaluating forecasts of binary events whose predictions are consumed by rational agents who take an action in response to a prediction, but whose utility is unknown to the forecaster. We show that optimizing forecasts for a single scoring rule (e.g., the Brier score) cannot guarantee low regret for all possible agents. In contrast, forecasts that are well-calibrated guarantee that all agents incur sublinear regret. However, calibration is not a necessary criterion here (it is possible for miscalibrated forecasts to provide good regret guarantees for all possible agents), and calibrated forecasting procedures have provably worse convergence rates than forecasting procedures targeting a single scoring rule. Motivated by this, we present a new metric for evaluating forecasts that we call U-calibration, equal to the maximal regret of the sequence of forecasts when evaluated under any bounded scoring rule. We show that sublinear U-calibration error is a necessary and sufficient condition for all agents to achieve sublinear regret guarantees. We additionally demonstrate how to compute the U-calibration error efficiently and provide an online algorithm that achieves $O(\sqrt{T})$ U-calibration error (on par with optimal rates for optimizing for a single scoring rule, and bypassing lower bounds for the traditionally calibrated learning procedures). Finally, we discuss generalizations to the multiclass prediction setting.
Non-Stochastic CDF Estimation Using Threshold Queries
Jan 13, 2023Estimating the empirical distribution of a scalar-valued data set is a basic and fundamental task. In this paper, we tackle the problem of estimating an empirical distribution in a setting with two challenging features. First, the algorithm does not directly observe the data; instead, it only asks a limited number of threshold queries about each sample. Second, the data are not assumed to be independent and identically distributed; instead, we allow for an arbitrary process generating the samples, including an adaptive adversary. These considerations are relevant, for example, when modeling a seller experimenting with posted prices to estimate the distribution of consumers' willingness to pay for a product: offering a price and observing a consumer's purchase decision is equivalent to asking a single threshold query about their value, and the distribution of consumers' values may be non-stationary over time, as early adopters may differ markedly from late adopters. Our main result quantifies, to within a constant factor, the sample complexity of estimating the empirical CDF of a sequence of elements of $[n]$, up to $\varepsilon$ additive error, using one threshold query per sample. The complexity depends only logarithmically on $n$, and our result can be interpreted as extending the existing logarithmic-complexity results for noisy binary search to the more challenging setting where noise is non-stochastic. Along the way to designing our algorithm, we consider a more general model in which the algorithm is allowed to make a limited number of simultaneous threshold queries on each sample. We solve this problem using Blackwell's Approachability Theorem and the exponential weights method. As a side result of independent interest, we characterize the minimum number of simultaneous threshold queries required by deterministic CDF estimation algorithms.