 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralised Active Perception in Continuous Action Spaces for the Coordinated Escort Problem
May 03, 2023



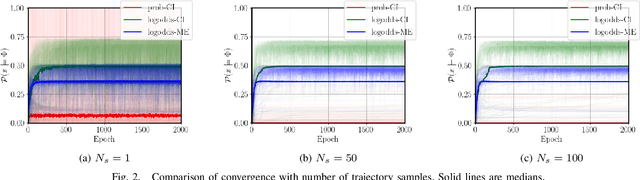
We consider the coordinated escort problem, where a decentralised team of supporting robots implicitly assist the mission of higher-value principal robots. The defining challenge is how to evaluate the effect of supporting robots' actions on the principal robots' mission. To capture this effect, we define two novel auxiliary reward functions for supporting robots called satisfaction improvement and satisfaction entropy, which computes the improvement in probability of mission success, or the uncertainty thereof. Given these reward functions, we coordinate the entire team of principal and supporting robots using decentralised cross entropy method (Dec-CEM), a new extension of CEM to multi-agent systems based on the product distribution approximation. In a simulated object avoidance scenario, our planning framework demonstrates up to two-fold improvement in task satisfaction against conventional decoupled information gathering.The significance of our results is to introduce a new family of algorithmic problems that will enable important new practical applications of heterogeneous multi-robot systems.
Topological Trajectory Prediction with Homotopy Classes
Jan 24, 2023



Trajectory prediction in a cluttered environment is key to many important robotics tasks such as autonomous navigation. However, there are an infinite number of possible trajectories to consider. To simplify the space of trajectories under consideration, we utilise homotopy classes to partition the space into countably many mathematically equivalent classes. All members within a class demonstrate identical high-level motion with respect to the environment, i.e., travelling above or below an obstacle. This allows high-level prediction of a trajectory in terms of a sparse label identifying its homotopy class. We therefore present a light-weight learning framework based on variable-order Markov processes to learn and predict homotopy classes and thus high-level agent motion. By informing a Gaussian Mixture Model (GMM) with our homotopy class predictions, we see great improvements in low-level trajectory prediction compared to a naive GMM on a real dataset.
Continuous Planning for Inertial-Aided Systems
Sep 12, 2022
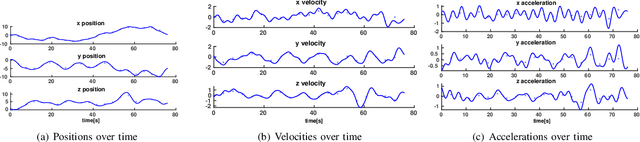
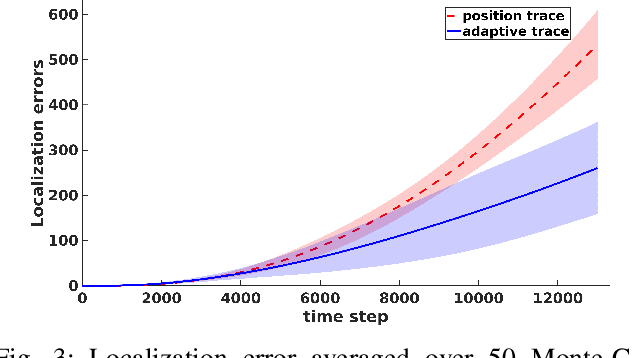
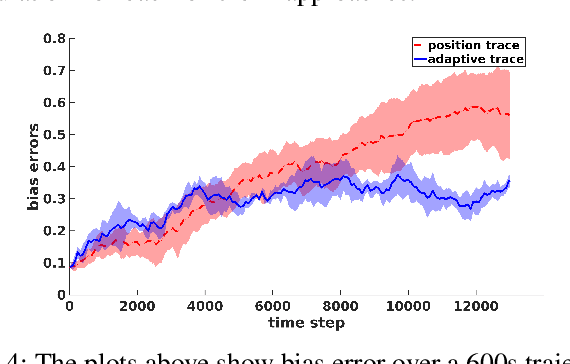
Inertial-aided systems require continuous motion excitation among other reasons to characterize the measurement biases that will enable accurate integration required for localization frameworks. This paper proposes the use of informative path planning to find the best trajectory for minimizing the uncertainty of IMU biases and an adaptive traces method to guide the planner towards trajectories which aid convergence. The key contribution is a novel regression method based on Gaussian Process (GP) to enforce continuity and differentiability between waypoints from a variant of the RRT* planning algorithm. We employ linear operators applied to the GP kernel function to infer not only continuous position trajectories, but also velocities and accelerations. The use of linear functionals enable velocity and acceleration constraints given by the IMU measurements to be imposed on the position GP model. The results from both simulation and real world experiments show that planning for IMU bias convergence helps minimize localization errors in state estimation frameworks.
Motion planning in task space with Gromov-Hausdorff approximations
Sep 11, 2022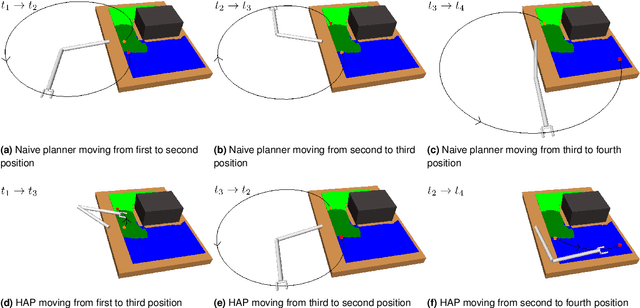
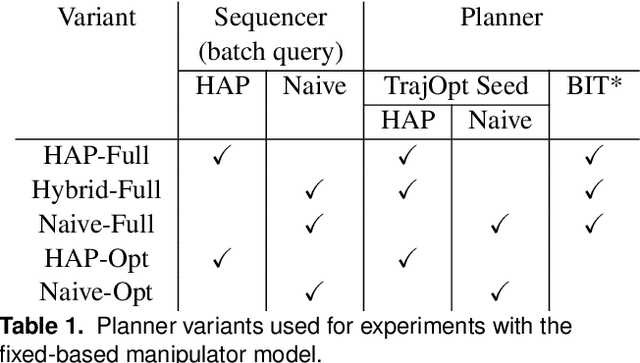
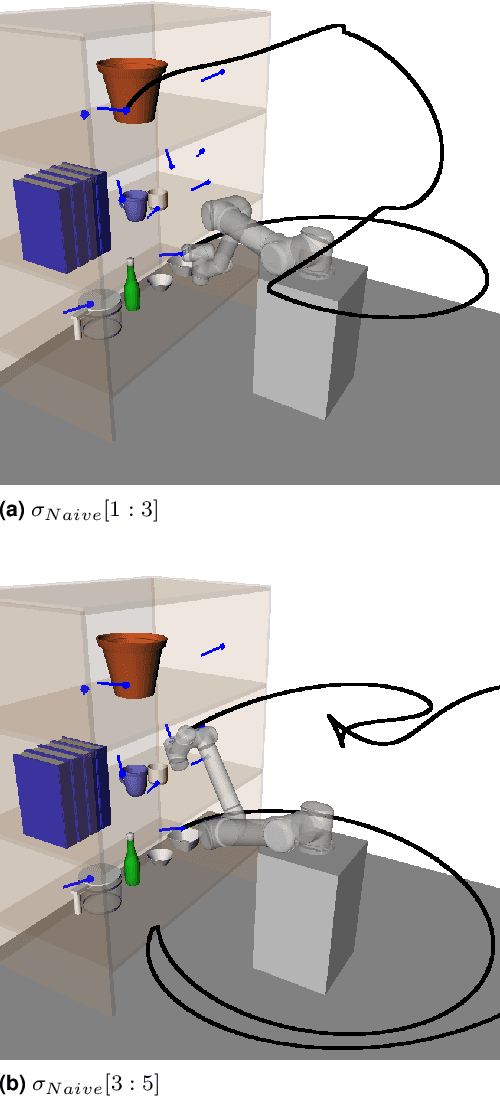
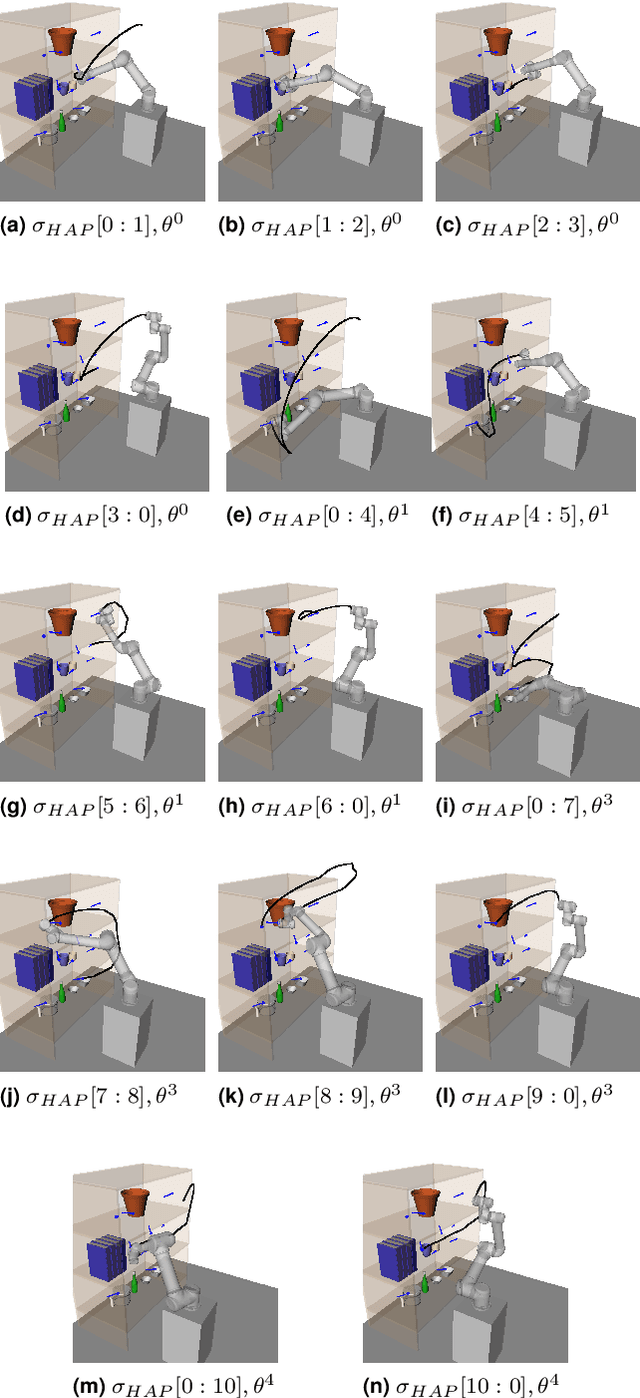
Applications of industrial robotic manipulators such as cobots can require efficient online motion planning in environments that have a combination of static and non-static obstacles. Existing general purpose planning methods often produce poor quality solutions when available computation time is restricted, or fail to produce a solution entirely. We propose a new motion planning framework designed to operate in a user-defined task space, as opposed to the robot's workspace, that intentionally trades off workspace generality for planning and execution time efficiency. Our framework automatically constructs trajectory libraries that are queried online, similar to previous methods that exploit offline computation. Importantly, our method also offers bounded suboptimality guarantees on trajectory length. The key idea is to establish approximate isometries known as $\epsilon$-Gromov-Hausdorff approximations such that points that are close by in task space are also close in configuration space. These bounding relations further imply that trajectories can be smoothly concatenated, which enables our framework to address batch-query scenarios where the objective is to find a minimum length sequence of trajectories that visit an unordered set of goals. We evaluate our framework in simulation with several kinematic configurations, including a manipulator mounted to a mobile base. Results demonstrate that our method achieves feasible real-time performance for practical applications and suggest interesting opportunities for extending its capabilities.
Informative Planning for Worst-Case Error Minimisation in Sparse Gaussian Process Regression
Mar 08, 2022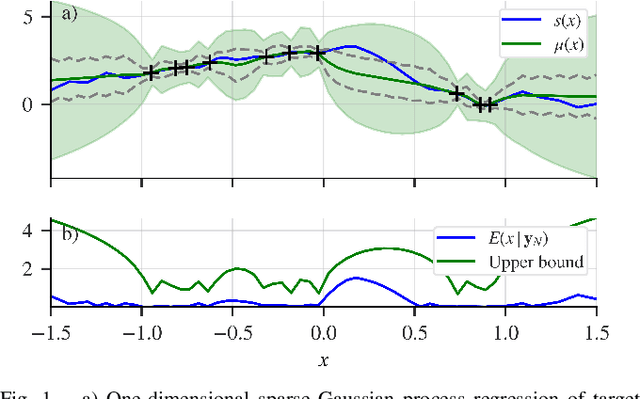
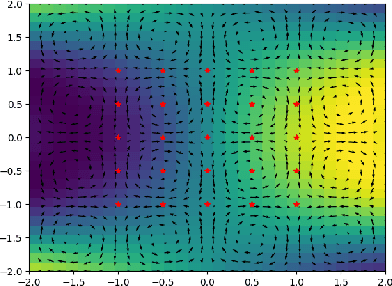
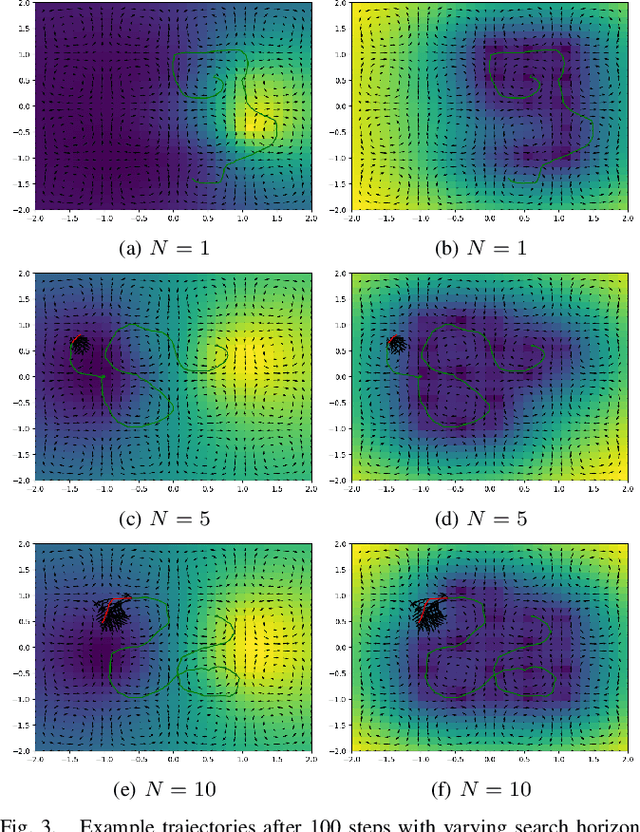
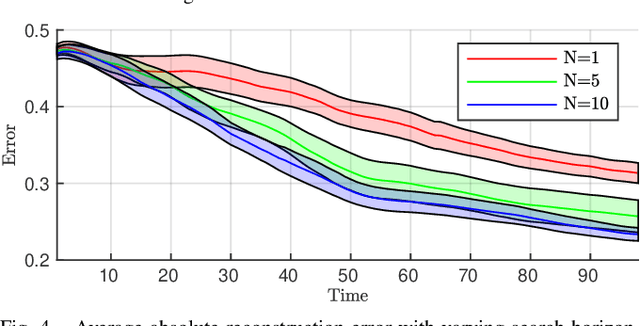
We present a planning framework for minimising the deterministic worst-case error in sparse Gaussian process (GP) regression. We first derive a universal worst-case error bound for sparse GP regression with bounded noise using interpolation theory on reproducing kernel Hilbert spaces (RKHSs). By exploiting the conditional independence (CI) assumption central to sparse GP regression, we show that the worst-case error minimisation can be achieved by solving a posterior entropy minimisation problem. In turn, the posterior entropy minimisation problem is solved using a Gaussian belief space planning algorithm. We corroborate the proposed worst-case error bound in a simple 1D example, and test the planning framework in simulation for a 2D vehicle in a complex flow field. Our results demonstrate that the proposed posterior entropy minimisation approach is effective in minimising deterministic error, and outperforms the conventional measurement entropy maximisation formulation when the inducing points are fixed.
Field trial on Ocean Estimation for Multi-Vessel Multi-Float-based Active perception
Jun 17, 2021
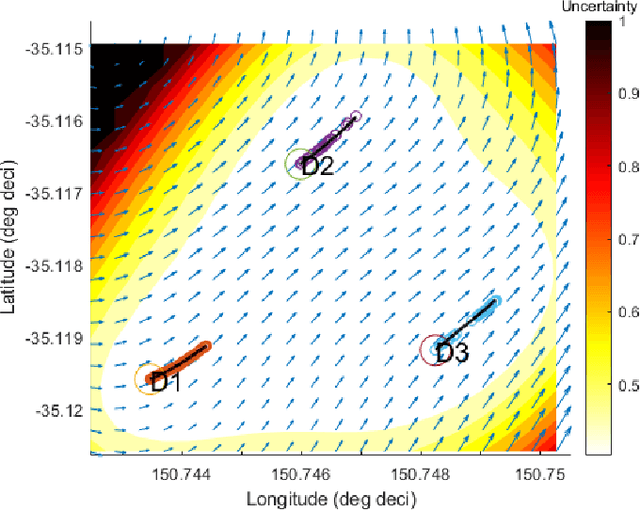
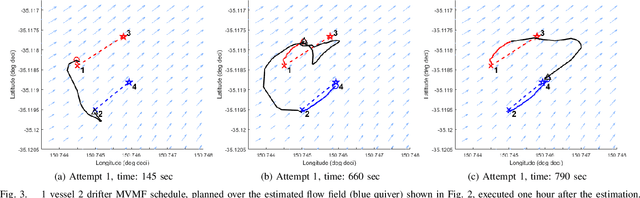
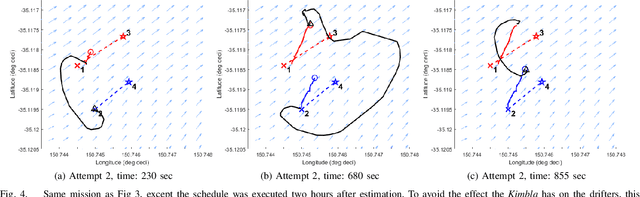
Marine vehicles have been used for various scientific missions where information over features of interest is collected. In order to maximise efficiency in collecting information over a large search space, we should be able to deploy a large number of autonomous vehicles that make a decision based on the latest understanding of the target feature in the environment. In our previous work, we have presented a hierarchical framework for the multi-vessel multi-float (MVMF) problem where surface vessels drop and pick up underactuated floats in a time-minimal way. In this paper, we present the field trial results using the framework with a number of drifters and floats. We discovered a number of important aspects that need to be considered in the proposed framework, and present the potential approaches to address the challenges.
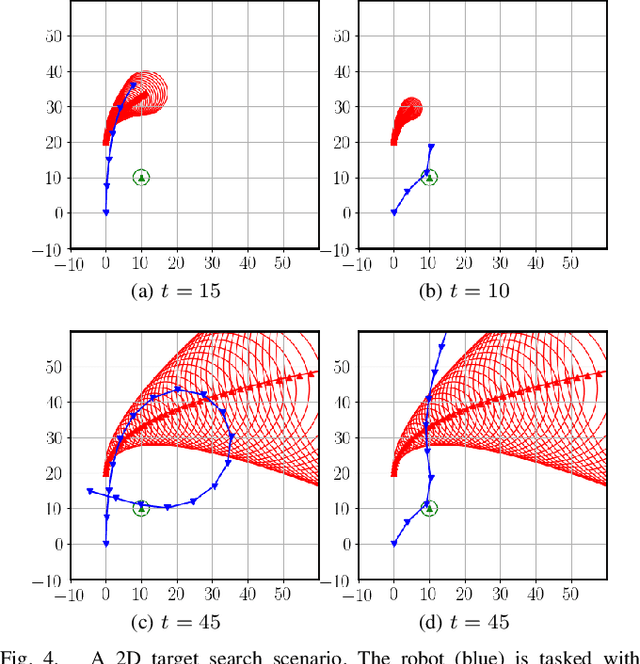
Decentralised Intelligence, Surveillance, and Reconnaissance in Unknown Environments with Heterogeneous Multi-Robot Systems
Jun 17, 2021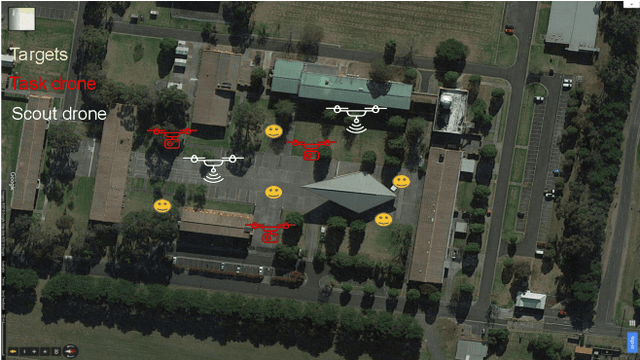
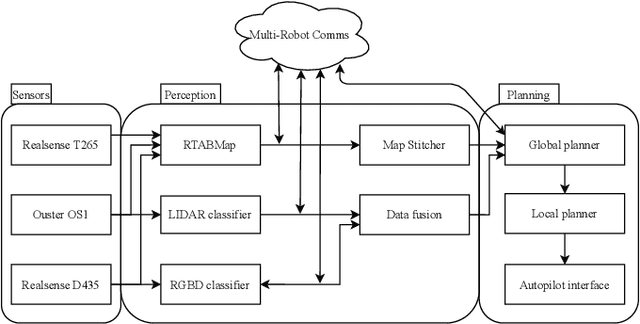
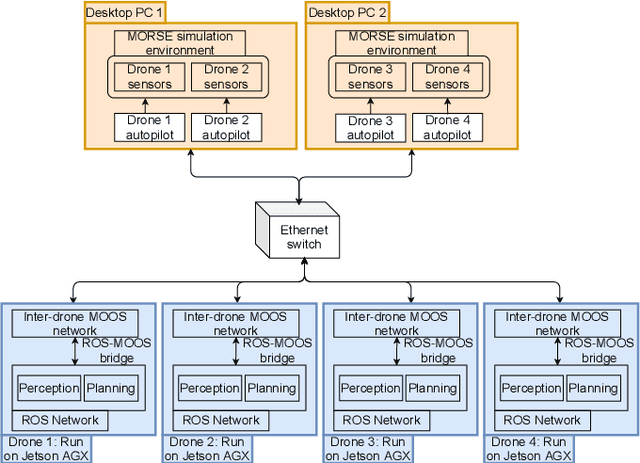
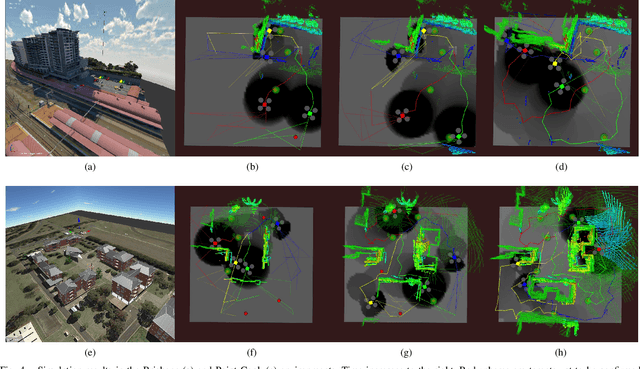
We present the design and implementation of a decentralised, heterogeneous multi-robot system for performing intelligence, surveillance and reconnaissance (ISR) in an unknown environment. The team consists of functionally specialised robots that gather information and others that perform a mission-specific task, and is coordinated to achieve simultaneous exploration and exploitation in the unknown environment. We present a practical implementation of such a system, including decentralised inter-robot localisation, mapping, data fusion and coordination. The system is demonstrated in an efficient distributed simulation. We also describe an UAS platform for hardware experiments, and the ongoing progress.
Signal Temporal Logic Synthesis as Probabilistic Inference
May 13, 2021

We reformulate the signal temporal logic (STL) synthesis problem as a maximum a-posteriori (MAP) inference problem. To this end, we introduce the notion of random STL~(RSTL), which extends deterministic STL with random predicates. This new probabilistic extension naturally leads to a synthesis-as-inference approach. The proposed method allows for differentiable, gradient-based synthesis while extending the class of possible uncertain semantics. We demonstrate that the proposed framework scales well with GPU-acceleration, and present realistic applications of uncertain semantics in robotics that involve target tracking and the use of occupancy grids.
An Upper Confidence Bound for Simultaneous Exploration and Exploitation in Heterogeneous Multi-Robot Systems
May 13, 2021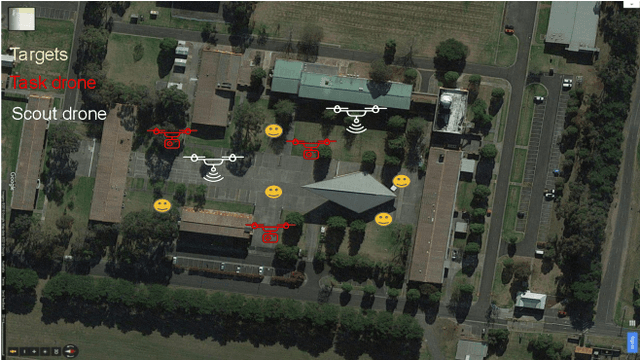
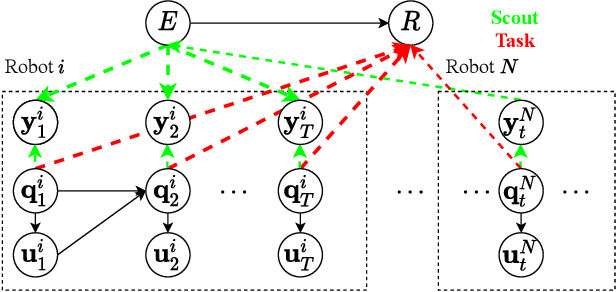
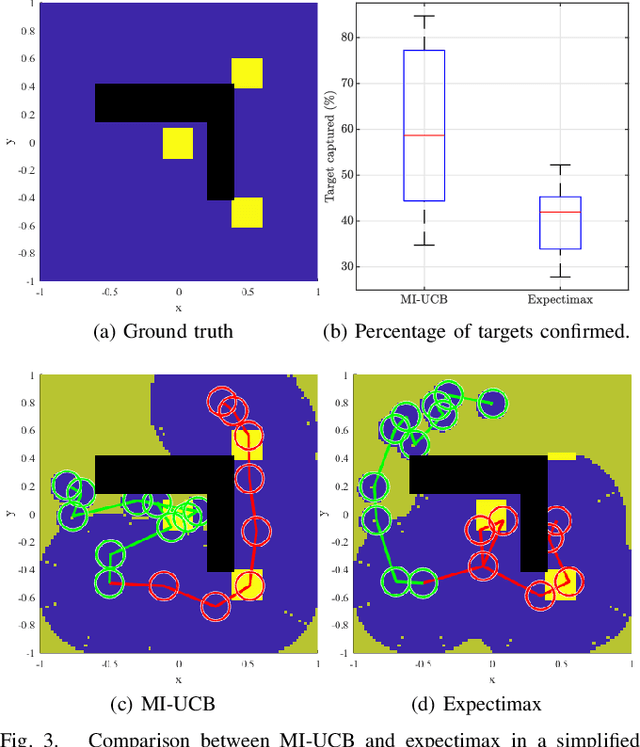
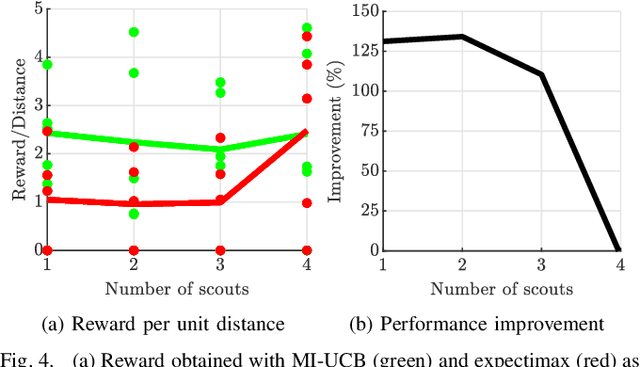
Heterogeneous multi-robot systems are advantageous for operations in unknown environments because functionally specialised robots can gather environmental information, while others perform tasks. We define this decomposition as the scout-task robot architecture and show how it avoids the need to explicitly balance exploration and exploitation~by permitting the system to do both simultaneously. The challenge is to guide exploration in a way that improves overall performance for time-limited tasks. We derive a novel upper confidence bound for simultaneous exploration and exploitation based on mutual information and present a general solution for scout-task coordination using decentralised Monte Carlo tree search. We evaluate the performance of our algorithms in a multi-drone surveillance scenario in which scout robots are equipped with low-resolution, long-range sensors and task robots capture detailed information using short-range sensors. The results address a new class of coordination problem for heterogeneous teams that has many practical applications.
3D Ensemble-Based Online Oceanic Flow Field Estimation for Underwater Glider Path Planning
Apr 09, 2021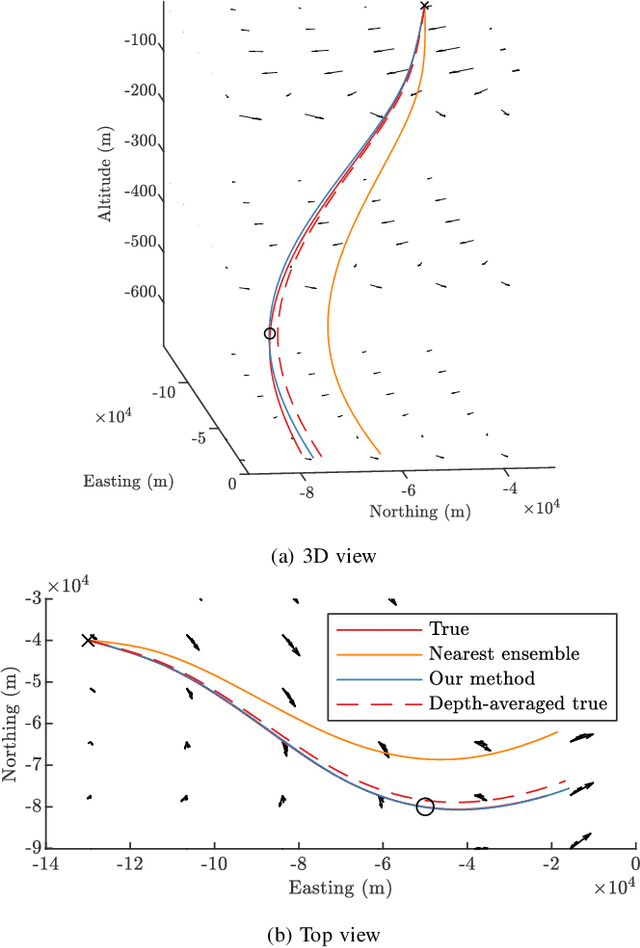
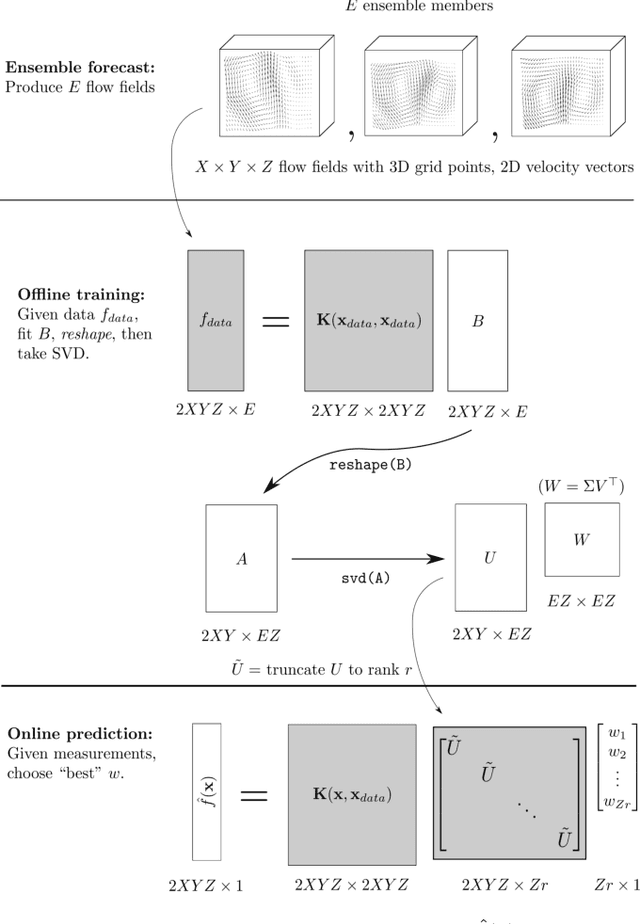
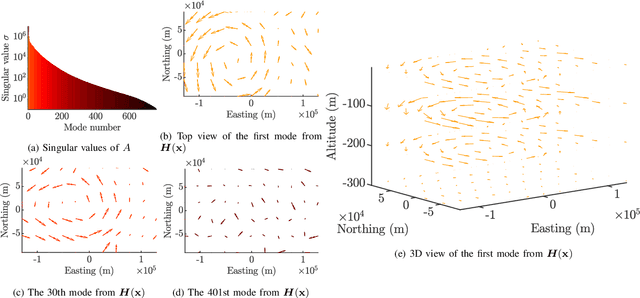
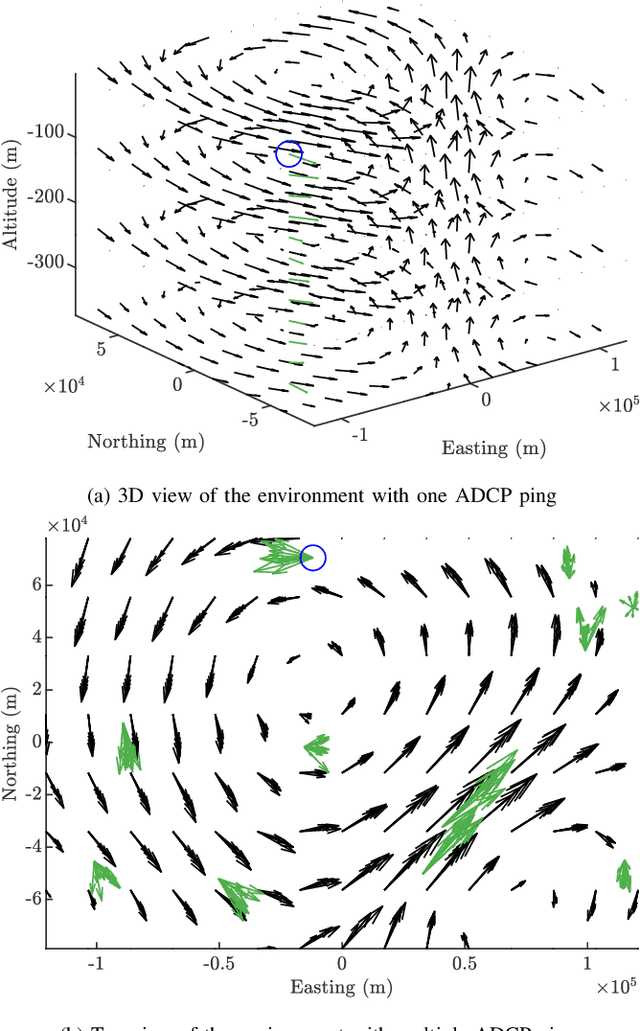
Estimating ocean flow fields in 3D is a critical step in enabling the reliable operation of underwater gliders and other small, low-powered autonomous marine vehicles. Existing methods produce depth-averaged 2D layers arranged at discrete vertical intervals, but this type of estimation can lead to severe navigation errors. Based on the observation that real-world ocean currents exhibit relatively low velocity vertical components, we propose an accurate 3D estimator that extends our previous work in estimating 2D flow fields as a linear combination of basis flows. The proposed algorithm uses data from ensemble forecasting to build a set of 3D basis flows, and then iteratively updates basis coefficients using point measurements of underwater currents. We report results from experiments using actual ensemble forecasts and synthetic measurements to compare the performance of our method to the direct 3D extension of the previous work. These results show that our method produces estimates with dramatically lower error metrics, with and without measurement noise.