 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Ensemble-Based Online Oceanic Flow Field Estimation for Underwater Glider Path Planning
Apr 09, 2021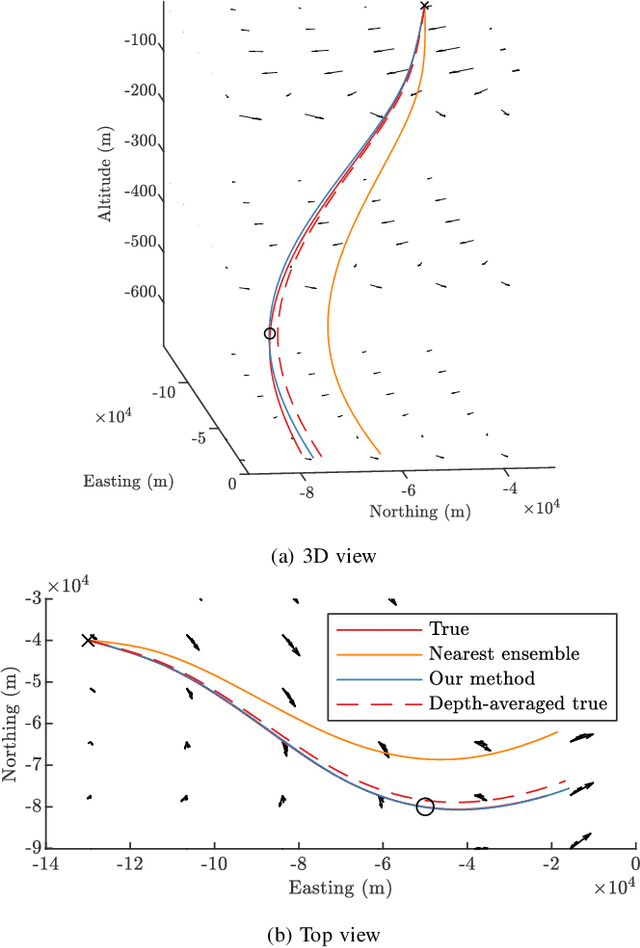
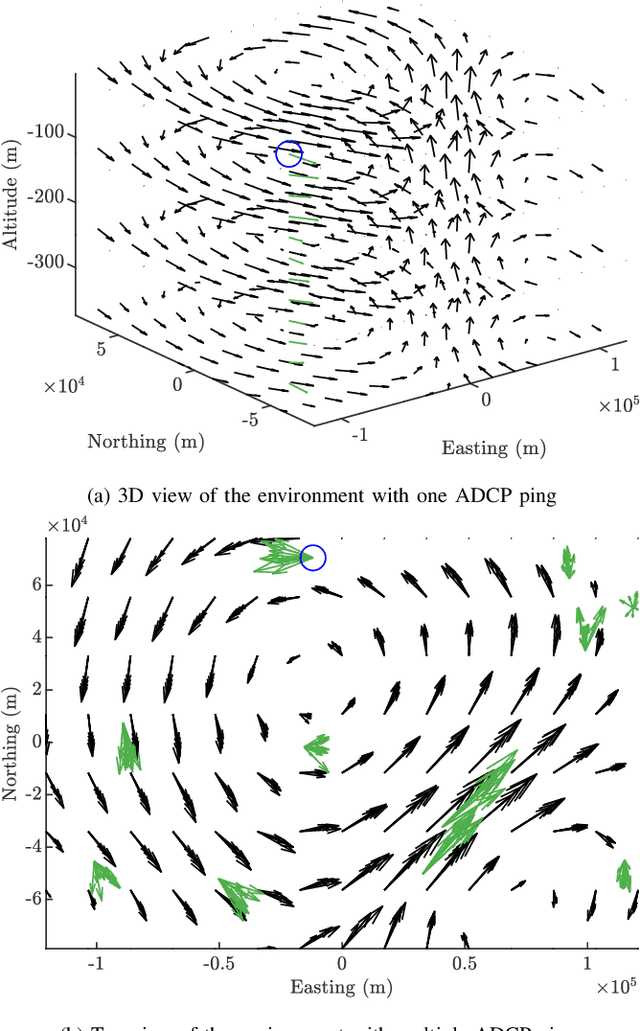
Estimating ocean flow fields in 3D is a critical step in enabling the reliable operation of underwater gliders and other small, low-powered autonomous marine vehicles. Existing methods produce depth-averaged 2D layers arranged at discrete vertical intervals, but this type of estimation can lead to severe navigation errors. Based on the observation that real-world ocean currents exhibit relatively low velocity vertical components, we propose an accurate 3D estimator that extends our previous work in estimating 2D flow fields as a linear combination of basis flows. The proposed algorithm uses data from ensemble forecasting to build a set of 3D basis flows, and then iteratively updates basis coefficients using point measurements of underwater currents. We report results from experiments using actual ensemble forecasts and synthetic measurements to compare the performance of our method to the direct 3D extension of the previous work. These results show that our method produces estimates with dramatically lower error metrics, with and without measurement noise.
Estimation of Spatially-Correlated Ocean Currents from Ensemble Forecasts and Online Measurements
Mar 23, 2021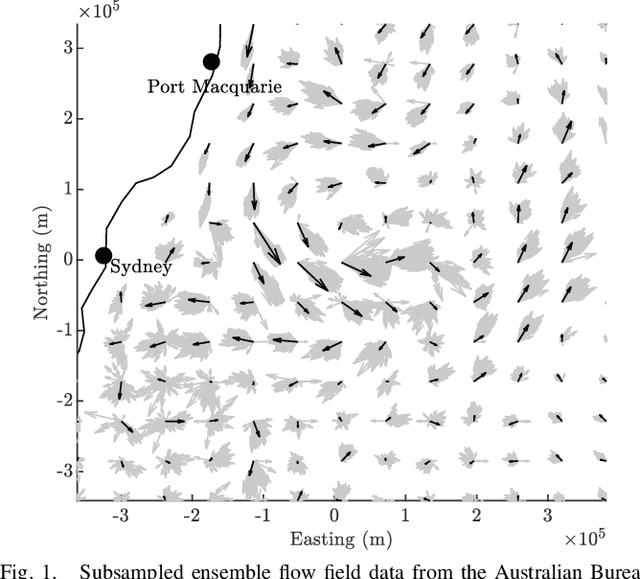
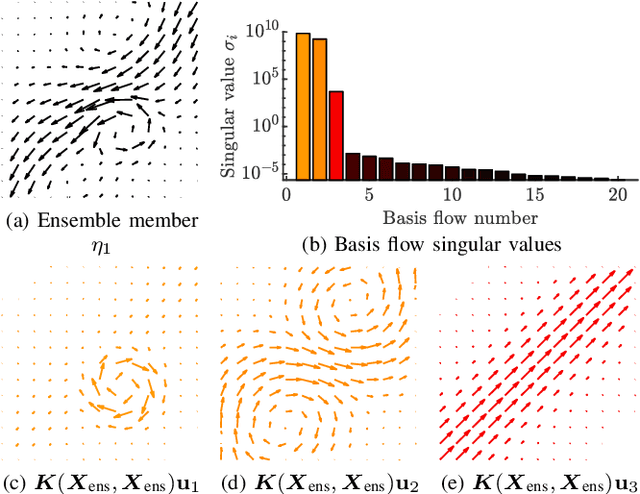
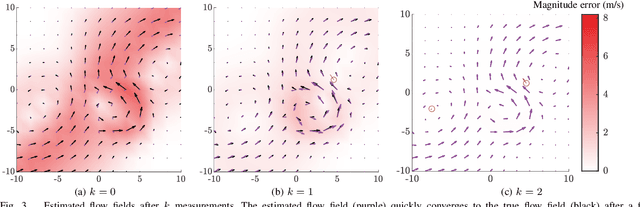
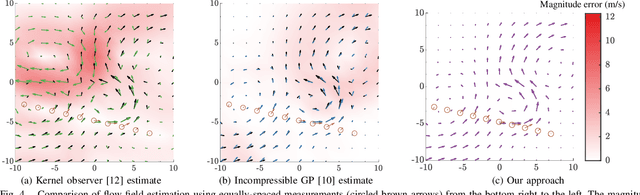
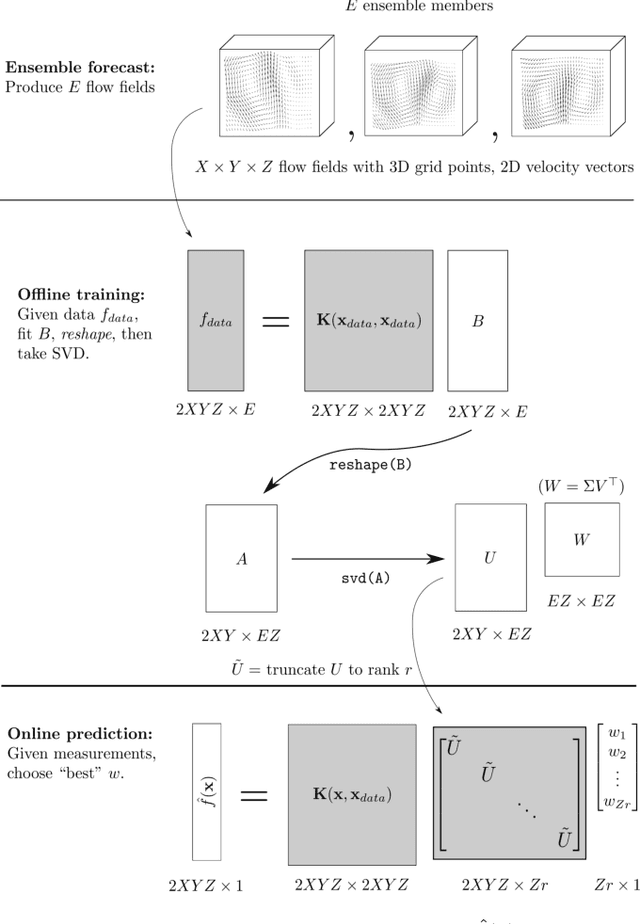
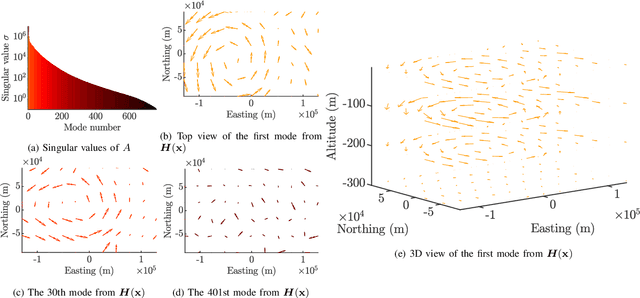
We present a method to estimate two-dimensional, time-invariant oceanic flow fields based on data from both ensemble forecasts and online measurements. Our method produces a realistic estimate in a computationally efficient manner suitable for use in marine robotics for path planning and related applications. We use kernel methods and singular value decomposition to find a compact model of the ensemble data that is represented as a linear combination of basis flow fields and that preserves the spatial correlations present in the data. Online measurements of ocean current, taken for example by marine robots, can then be incorporated using recursive Bayesian estimation. We provide computational analysis, performance comparisons with related methods, and demonstration with real-world ensemble data to show the computational efficiency and validity of our method. Possible applications in addition to path planning include active perception for model improvement through deliberate choice of measurement locations.
Distance and Steering Heuristics for Streamline-Based Flow Field Planning
May 14, 2020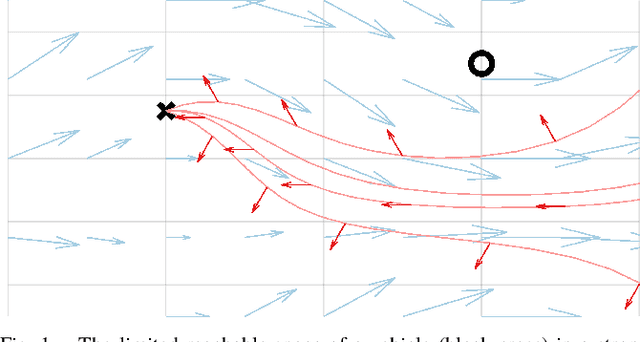
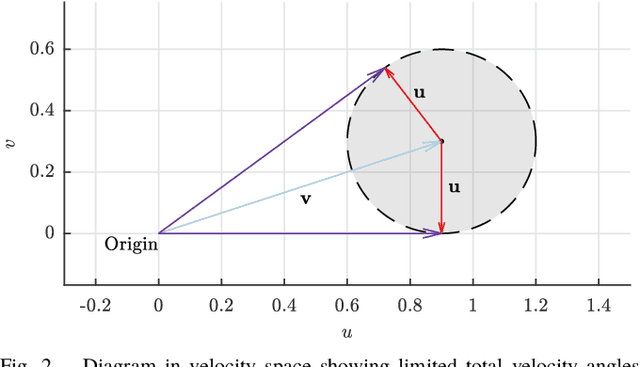
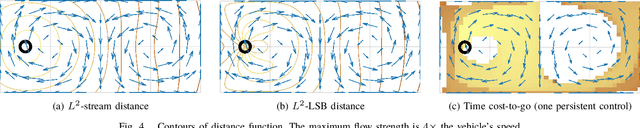
Motion planning for vehicles under the influence of flow fields can benefit from the idea of streamline-based planning, which exploits ideas from fluid dynamics to achieve computational efficiency. Important to such planners is an efficient means of computing the travel distance and direction between two points in free space, but this is difficult to achieve in strong incompressible flows such as ocean currents. We propose two useful distance functions in analytical form that combine Euclidean distance with values of the stream function associated with a flow field, and with an estimation of the strength of the opposing flow between two points. Further, we propose steering heuristics that are useful for steering towards a sampled point. We evaluate these ideas by integrating them with RRT* and comparing the algorithm's performance with state-of-the-art methods in an artificial flow field and in actual ocean prediction data in the region of the dominant East Australian Current between Sydney and Brisbane. Results demonstrate the method's computational efficiency and ability to find high-quality paths outperforming state-of-the-art methods, and show promise for practical use with autonomous marine robots.
Minimally Invasive Social Navigation
May 08, 2020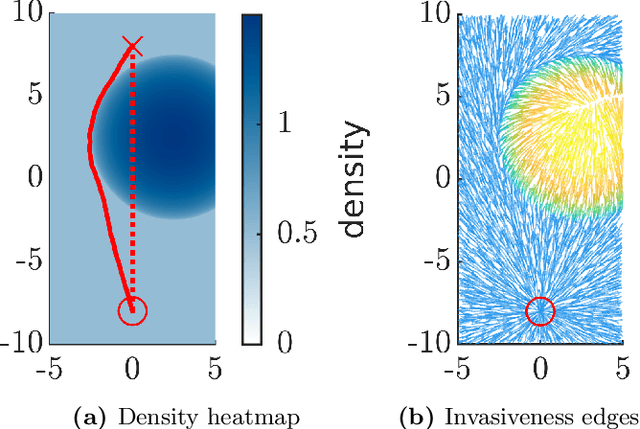
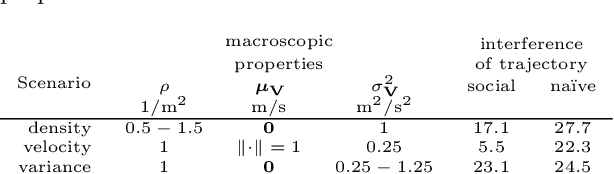
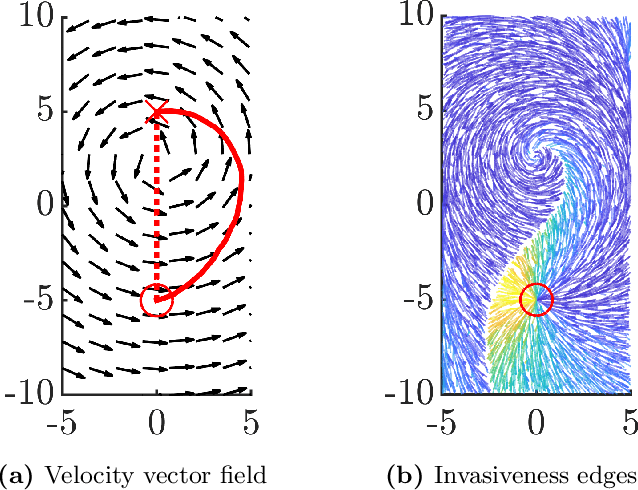
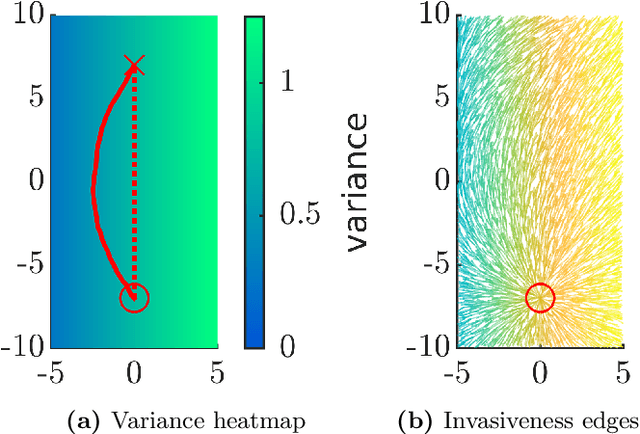
Integrating mobile robots into human society involves the fundamental problem of navigation in crowds. This problem has been studied by considering the behaviour of humans at the level of individuals, but this representation limits the computational efficiency of motion planning algorithms. We explore the idea of representing a crowd as a flow field, and propose a formal definition of path quality based on the concept of invasiveness; a robot should attempt to navigate in a way that is minimally invasive to humans in its environment. We develop an algorithmic framework for path planning based on this definition and present experimental results that indicate its effectiveness. These results open new algorithmic questions motivated by the flow field representation of crowds and are a necessary step on the path to end-to-end implementations.
Streamline-Based Control of Underwater Gliders in 3D Environments
May 08, 2020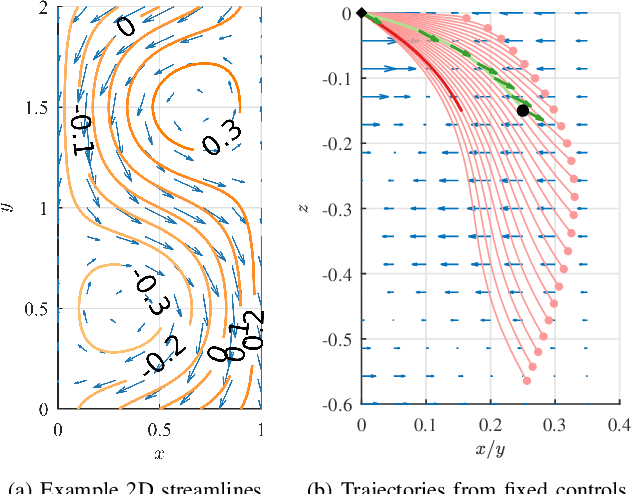
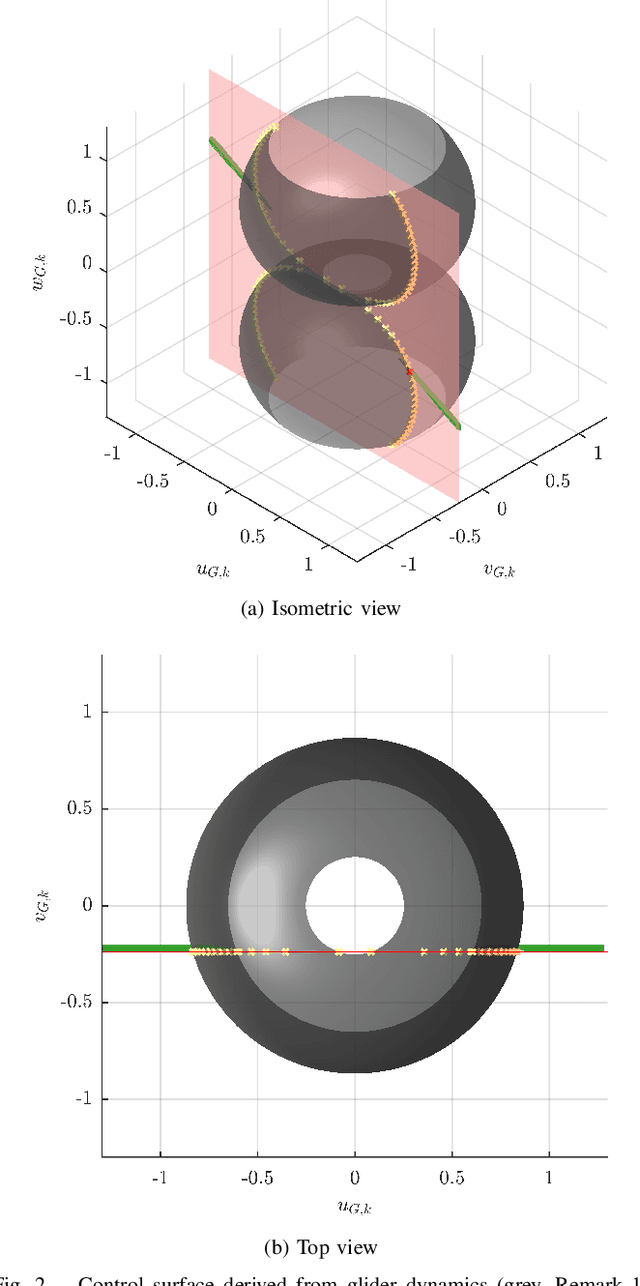
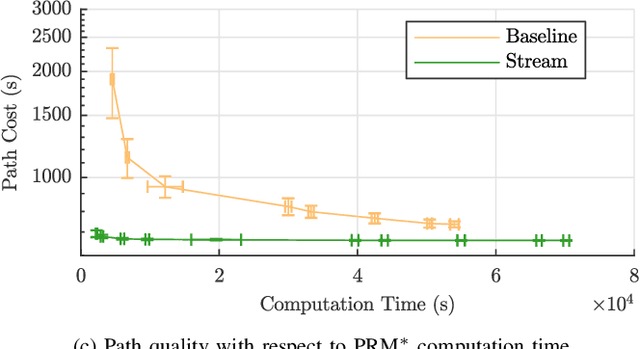
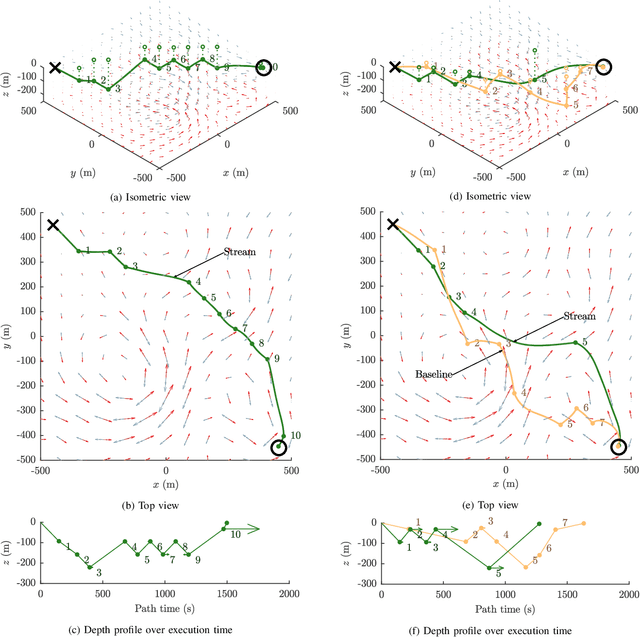
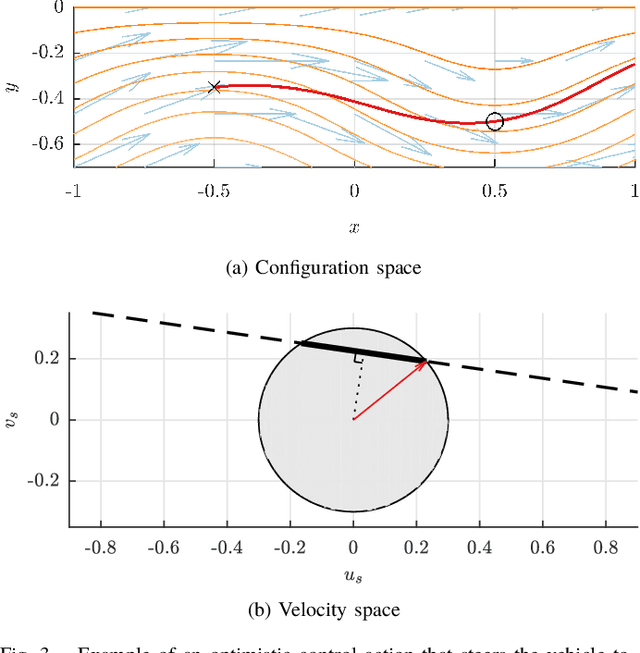
Autonomous underwater gliders use buoyancy control to achieve forward propulsion via a sawtooth-like, rise-and-fall trajectory. Because gliders are slow-moving relative to ocean currents, glider control must consider the effect of oceanic flows. In previous work, we proposed a method to control underwater vehicles in the (horizontal) plane by describing such oceanic flows in terms of streamlines, which are the level sets of stream functions. However, the general analytical form of streamlines in 3D is unknown. In this paper, we show how streamline control can be used in 3D environments by assuming a 2.5D model of ocean currents. We provide an efficient algorithm that acts as a steering function for a single rise or dive component of the glider's sawtooth trajectory, integrate this algorithm within a sampling-based motion planning framework to support long-distance path planning, and provide several examples in simulation in comparison with a baseline method. The key to our method's computational efficiency is an elegant dimensionality reduction to a 1D control region. Streamline-based control can be integrated within various sampling-based frameworks and allows for online planning for gliders in complicated oceanic flows.