 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive-Resolution Gaussian Process Mapping for Efficient UAV-based Terrain Monitoring
Sep 29, 2021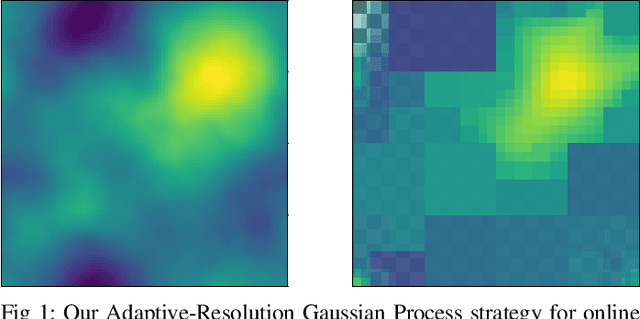
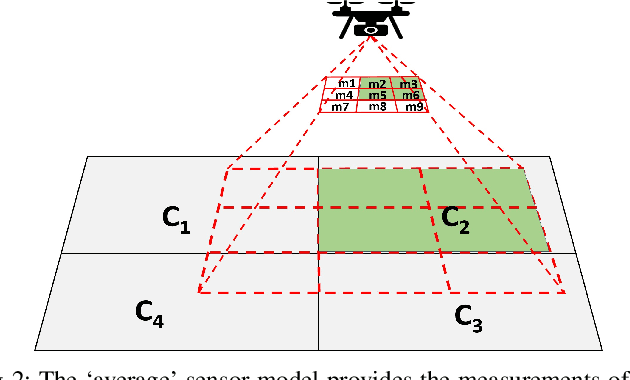
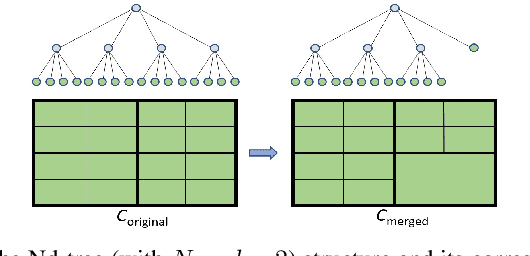
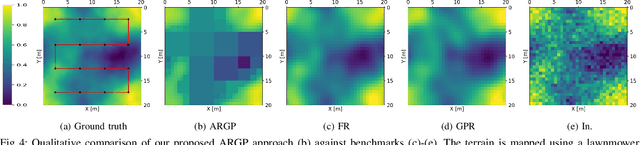
Unmanned aerial vehicles (UAVs) are rapidly gaining popularity in a variety of environmental monitoring tasks. A key requirement for autonomous operation is the ability to perform efficient environmental mapping and path planning online, given their limited on-board resources constraining operation time and computational capacity. To address this, we present an adaptive-resolution approach for terrain mapping based on the Nd-tree structure and Gaussian Processes (GPs). Our approach enables retaining details in areas of interest using higher map resolutions while compressing information in uninteresting areas at coarser resolutions to achieve a compact map representation of the environment. A key aspect of our approach is an integral kernel encoding spatial correlation of 2D grid cells, which enables merging uninteresting grid cells in a theoretically sound way. Results show that our approach is more efficient in terms of time and memory consumption without compromising on mapping quality. The resulting adaptive-resolution map accelerates the on-line adaptive path planning as well. Both performance enhancement in mapping and planning facilitate the efficiency of autonomous environmental monitoring with UAVs.
Multi-modal Scene-compliant User Intention Estimation for Navigation
Jun 13, 2021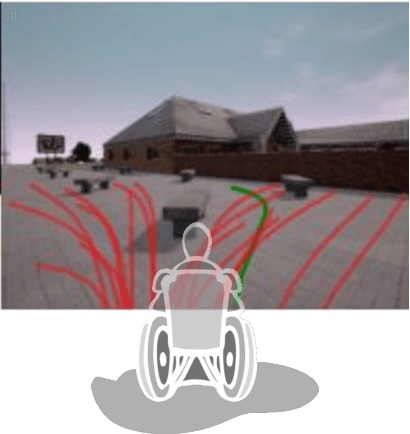
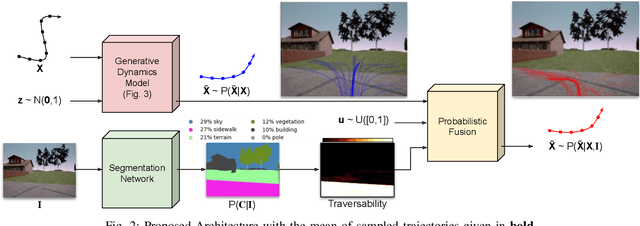
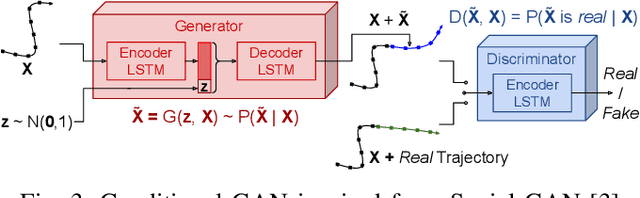
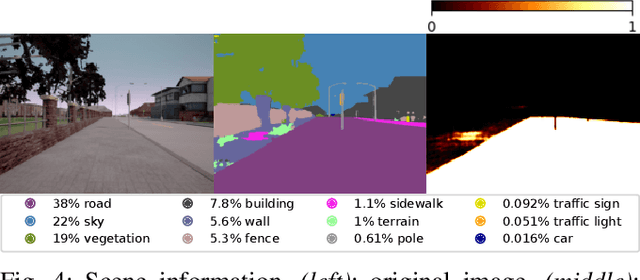
A multi-modal framework to generated user intention distributions when operating a mobile vehicle is proposed in this work. The model learns from past observed trajectories and leverages traversability information derived from the visual surroundings to produce a set of future trajectories, suitable to be directly embedded into a perception-action shared control strategy on a mobile agent, or as a safety layer to supervise the prudent operation of the vehicle. We base our solution on a conditional Generative Adversarial Network with Long-Short Term Memory cells to capture trajectory distributions conditioned on past trajectories, further fused with traversability probabilities derived from visual segmentation with a Convolutional Neural Network. The proposed data-driven framework results in a significant reduction in error of the predicted trajectories (versus the ground truth) from comparable strategies in the literature (e.g. Social-GAN) that fail to account for information other than the agent's past history. Experiments were conducted on a dataset collected with a custom wheelchair model built onto the open-source urban driving simulator CARLA, proving also that the proposed framework can be used with a small, un-annotated dataset.
Minimally Invasive Social Navigation
May 08, 2020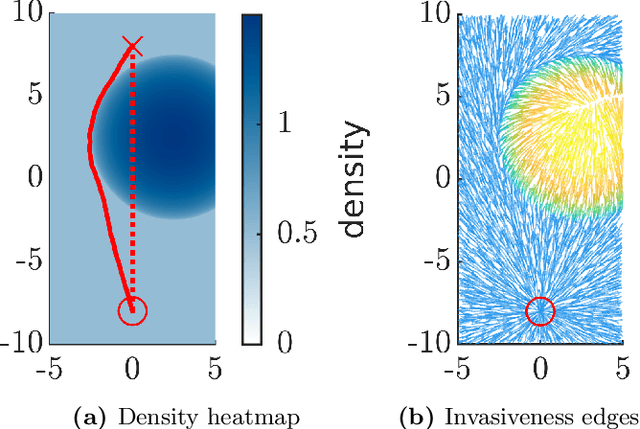
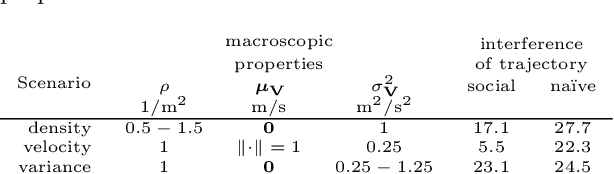
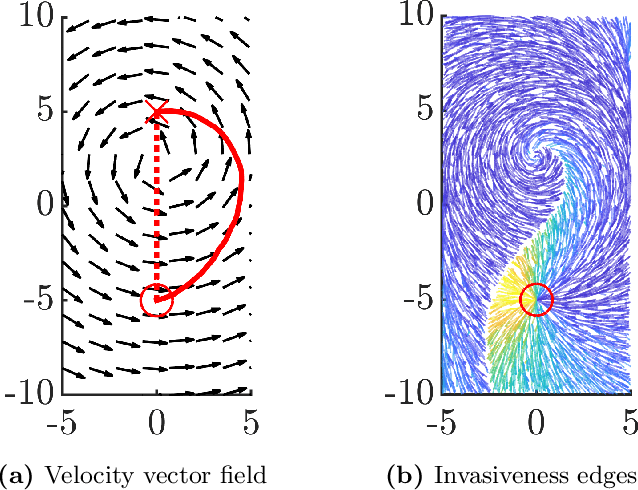
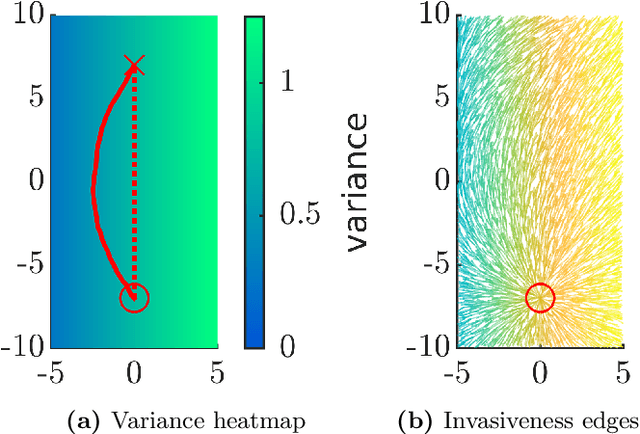
Integrating mobile robots into human society involves the fundamental problem of navigation in crowds. This problem has been studied by considering the behaviour of humans at the level of individuals, but this representation limits the computational efficiency of motion planning algorithms. We explore the idea of representing a crowd as a flow field, and propose a formal definition of path quality based on the concept of invasiveness; a robot should attempt to navigate in a way that is minimally invasive to humans in its environment. We develop an algorithmic framework for path planning based on this definition and present experimental results that indicate its effectiveness. These results open new algorithmic questions motivated by the flow field representation of crowds and are a necessary step on the path to end-to-end implementations.