 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic keypoint extraction for scanned animals using multi-depth-camera systems
Nov 16, 2022



Keypoint annotation in point clouds is an important task for 3D reconstruction, object tracking and alignment, in particular in deformable or moving scenes. In the context of agriculture robotics, it is a critical task for livestock automation to work toward condition assessment or behaviour recognition. In this work, we propose a novel approach for semantic keypoint annotation in point clouds, by reformulating the keypoint extraction as a regression problem of the distance between the keypoints and the rest of the point cloud. We use the distance on the point cloud manifold mapped into a radial basis function (RBF), which is then learned using an encoder-decoder architecture. Special consideration is given to the data augmentation specific to multi-depth-camera systems by considering noise over the extrinsic calibration and camera frame dropout. Additionally, we investigate computationally efficient non-rigid deformation methods that can be applied to animal point clouds. Our method is tested on data collected in the field, on moving beef cattle, with a calibrated system of multiple hardware-synchronised RGB-D cameras.
Minimally Invasive Social Navigation
May 08, 2020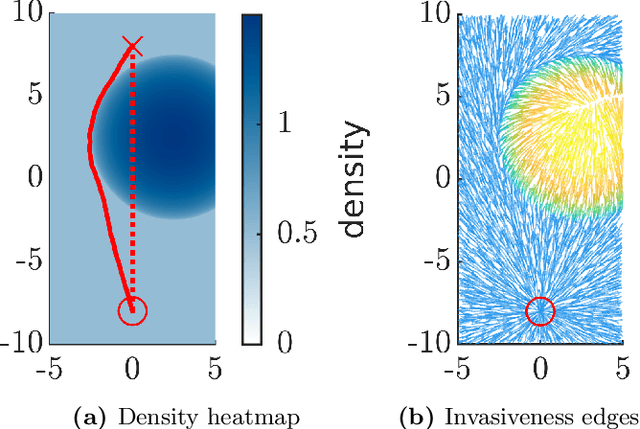
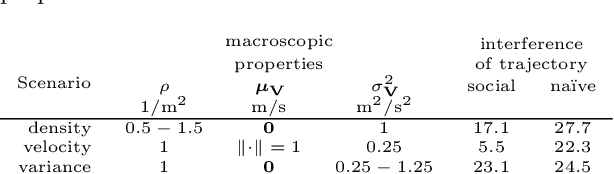
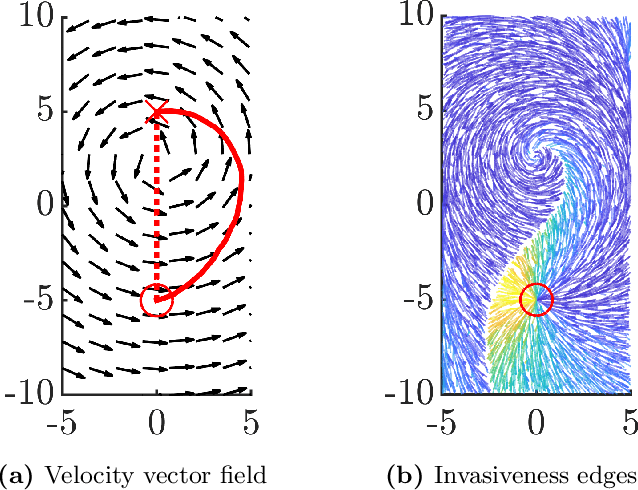
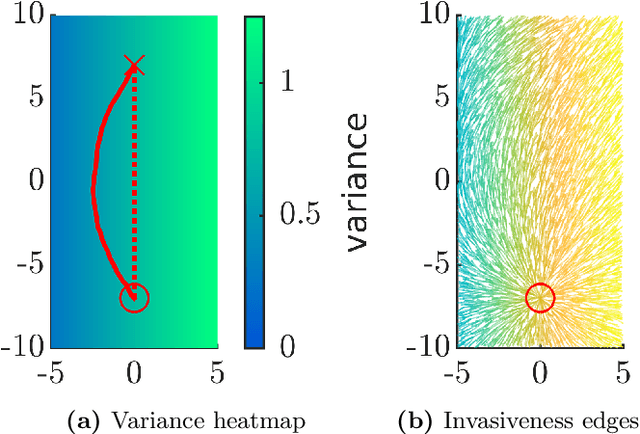
Integrating mobile robots into human society involves the fundamental problem of navigation in crowds. This problem has been studied by considering the behaviour of humans at the level of individuals, but this representation limits the computational efficiency of motion planning algorithms. We explore the idea of representing a crowd as a flow field, and propose a formal definition of path quality based on the concept of invasiveness; a robot should attempt to navigate in a way that is minimally invasive to humans in its environment. We develop an algorithmic framework for path planning based on this definition and present experimental results that indicate its effectiveness. These results open new algorithmic questions motivated by the flow field representation of crowds and are a necessary step on the path to end-to-end implementations.