 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeField trial on Ocean Estimation for Multi-Vessel Multi-Float-based Active perception
Jun 17, 2021
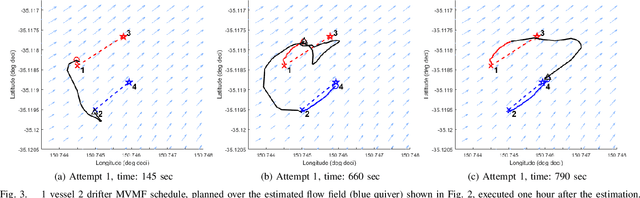
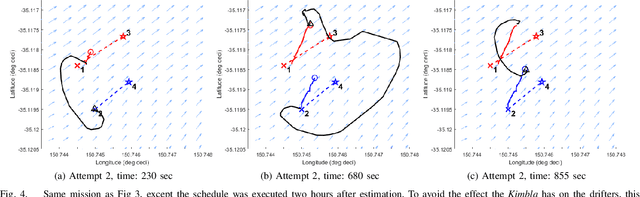
Marine vehicles have been used for various scientific missions where information over features of interest is collected. In order to maximise efficiency in collecting information over a large search space, we should be able to deploy a large number of autonomous vehicles that make a decision based on the latest understanding of the target feature in the environment. In our previous work, we have presented a hierarchical framework for the multi-vessel multi-float (MVMF) problem where surface vessels drop and pick up underactuated floats in a time-minimal way. In this paper, we present the field trial results using the framework with a number of drifters and floats. We discovered a number of important aspects that need to be considered in the proposed framework, and present the potential approaches to address the challenges.
Feature Space Exploration For Planning Initial Benthic AUV Surveys
May 25, 2021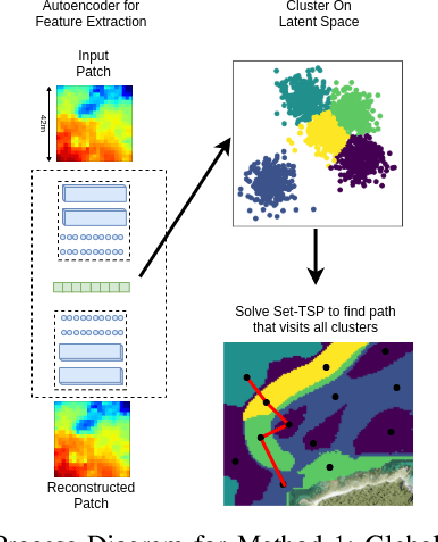



Special-purpose Autonomous Underwater Vehicles (AUVs) are utilised for benthic (seafloor) surveys, where the vehicle collects optical imagery of near the seafloor. Due to the small-sensor footprint of the cameras and the vast areas to be surveyed, these AUVs can not feasibly full coverage of areas larger than a few tens of thousands of square meters. Therefore AUV paths which sample sparsely, yet effectively, the survey areas are necessary. Broad scale acoustic bathymetric data is ready available over large areas, and often is a useful prior of seafloor cover. As such, prior bathymetry can be used to guide AUV data collection. This research proposes methods for planning initial AUV surveys that efficiently explore a feature space representation of the bathymetry, in order to sample from a diverse set of bathymetric terrain. This will enable the AUV to visit areas that likely contain unique habitats and are representative of the entire survey site. The suitability of these methods to plan AUV surveys is evaluated based on the coverage of the feature space and also the ability to visit all classes of benthic habitat on the initial dive. This is a valuable tool for AUV surveys as it increases the utility of initial dives. It also delivers a comprehensive training set to learn a relationship between acoustic bathymetry and visually-derived seafloor classifications.
Towards Adaptive Benthic Habitat Mapping
Jun 20, 2020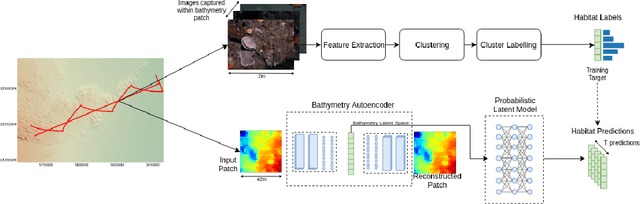

Autonomous Underwater Vehicles (AUVs) are increasingly being used to support scientific research and monitoring studies. One such application is in benthic habitat mapping where these vehicles collect seafloor imagery that complements broadscale bathymetric data collected using sonar. Using these two data sources, the relationship between remotely-sensed acoustic data and the sampled imagery can be learned, creating a habitat model. As the areas to be mapped are often very large and AUV systems collecting seafloor imagery can only sample from a small portion of the survey area, the information gathered should be maximised for each deployment. This paper illustrates how the habitat models themselves can be used to plan more efficient AUV surveys by identifying where to collect further samples in order to most improve the habitat model. A Bayesian neural network is used to predict visually-derived habitat classes when given broad-scale bathymetric data. This network can also estimate the uncertainty associated with a prediction, which can be deconstructed into its aleatoric (data) and epistemic (model) components. We demonstrate how these structured uncertainty estimates can be utilised to improve the model with fewer samples. Such adaptive approaches to benthic surveys have the potential to reduce costs by prioritizing further sampling efforts. We illustrate the effectiveness of the proposed approach using data collected by an AUV on offshore reefs in Tasmania, Australia.