 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Space Exploration For Planning Initial Benthic AUV Surveys
Paper and Code
May 25, 2021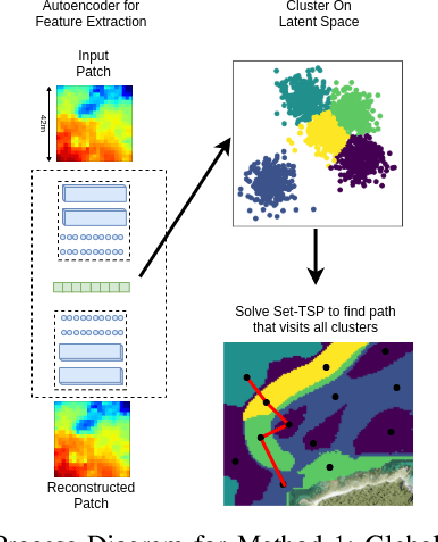



Special-purpose Autonomous Underwater Vehicles (AUVs) are utilised for benthic (seafloor) surveys, where the vehicle collects optical imagery of near the seafloor. Due to the small-sensor footprint of the cameras and the vast areas to be surveyed, these AUVs can not feasibly full coverage of areas larger than a few tens of thousands of square meters. Therefore AUV paths which sample sparsely, yet effectively, the survey areas are necessary. Broad scale acoustic bathymetric data is ready available over large areas, and often is a useful prior of seafloor cover. As such, prior bathymetry can be used to guide AUV data collection. This research proposes methods for planning initial AUV surveys that efficiently explore a feature space representation of the bathymetry, in order to sample from a diverse set of bathymetric terrain. This will enable the AUV to visit areas that likely contain unique habitats and are representative of the entire survey site. The suitability of these methods to plan AUV surveys is evaluated based on the coverage of the feature space and also the ability to visit all classes of benthic habitat on the initial dive. This is a valuable tool for AUV surveys as it increases the utility of initial dives. It also delivers a comprehensive training set to learn a relationship between acoustic bathymetry and visually-derived seafloor classifications.