 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Gaussian Process Classification and an Application in Subsea Robotics
Nov 19, 2025Teams of cooperating autonomous underwater vehicles (AUVs) rely on acoustic communication for coordination, yet this communication medium is constrained by limited range, multi-path effects, and low bandwidth. One way to address the uncertainty associated with acoustic communication is to learn the communication environment in real-time. We address the challenge of a team of robots building a map of the probability of communication success from one location to another in real-time. This is a decentralized classification problem -- communication events are either successful or unsuccessful -- where AUVs share a subset of their communication measurements to build the map. The main contribution of this work is a rigorously derived data sharing policy that selects measurements to be shared among AUVs. We experimentally validate our proposed sharing policy using real acoustic communication data collected from teams of Virginia Tech 690 AUVs, demonstrating its effectiveness in underwater environments.
Efficient Feature Mapping Using a Collaborative Team of AUVs
Dec 27, 2024



We present the results of experiments performed using a team of small autonomous underwater vehicles (AUVs) to determine the location of an isobath. The primary contributions of this work are (1) the development of a novel objective function for level set estimation that utilizes a rigorous assessment of uncertainty, and (2) a description of the practical challenges and corresponding solutions needed to implement our approach in the field using a team of AUVs. We combine path planning techniques and an approach to decentralization from prior work that yields theoretical performance guarantees. Experimentation with a team of AUVs provides empirical evidence that the desirable performance guarantees can be preserved in practice even in the presence of limitations that commonly arise in underwater robotics, including slow and intermittent acoustic communications and limited computational resources.
Batch Estimation of a Steady, Uniform, Flow-Field from Ground Velocity and Heading Measurements
Feb 26, 2024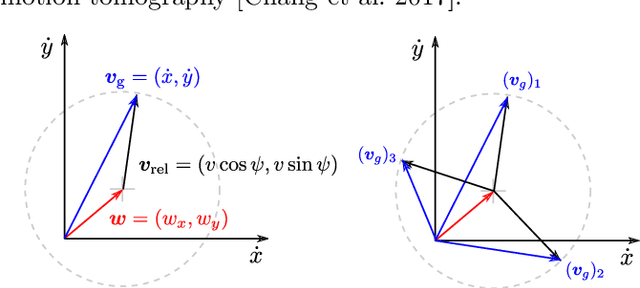
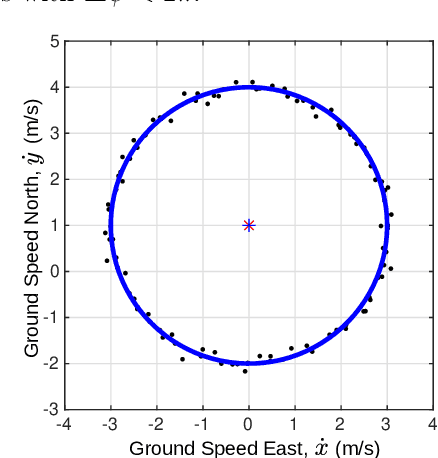
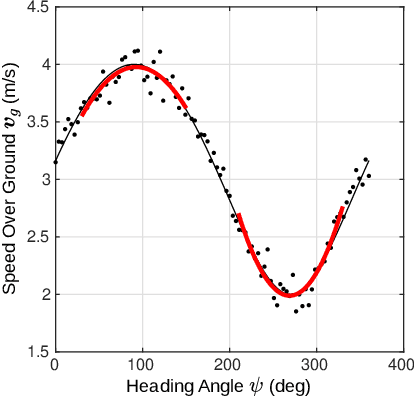
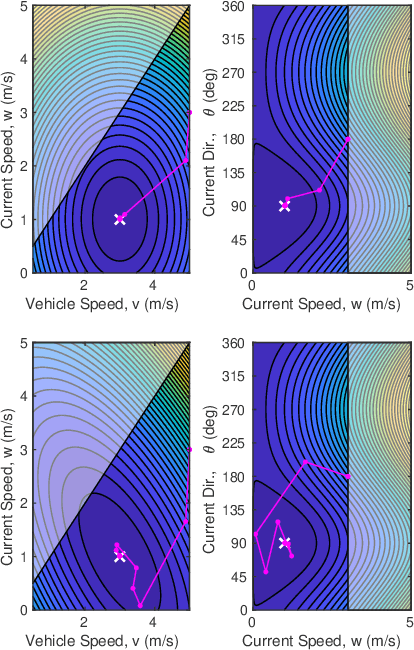
This paper presents three batch estimation methods that use noisy ground velocity and heading measurements from a vehicle executing a circular orbit (or similar large heading change maneuver) to estimate the speed and direction of a steady, uniform, flow-field. The methods are based on a simple kinematic model of the vehicle's motion and use curve-fitting or nonlinear least-square optimization. A Monte Carlo simulation with randomized flow conditions is used to evaluate the batch estimation methods while varying the measurement noise of the data and the interval of unique heading traversed during the maneuver. The methods are also compared using experimental data obtained with a Bluefin-21 unmanned underwater vehicle performing a series of circular orbit maneuvers over a five hour period in a tide-driven flow.
Learning Which Side to Scan: Multi-View Informed Active Perception with Side Scan Sonar for Autonomous Underwater Vehicles
Feb 02, 2024
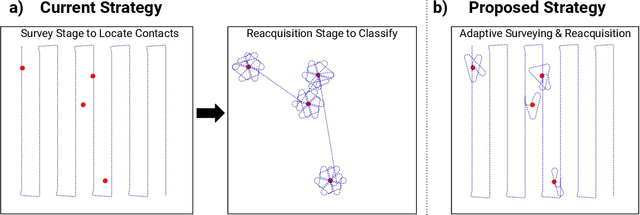

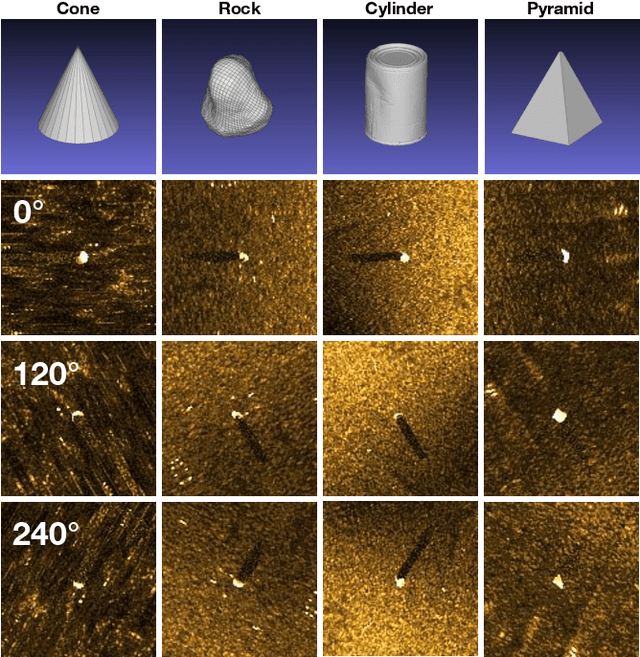
Autonomous underwater vehicles often perform surveys that capture multiple views of targets in order to provide more information for human operators or automatic target recognition algorithms. In this work, we address the problem of choosing the most informative views that minimize survey time while maximizing classifier accuracy. We introduce a novel active perception framework for multi-view adaptive surveying and reacquisition using side scan sonar imagery. Our framework addresses this challenge by using a graph formulation for the adaptive survey task. We then use Graph Neural Networks (GNNs) to both classify acquired sonar views and to choose the next best view based on the collected data. We evaluate our method using simulated surveys in a high-fidelity side scan sonar simulator. Our results demonstrate that our approach is able to surpass the state-of-the-art in classification accuracy and survey efficiency. This framework is a promising approach for more efficient autonomous missions involving side scan sonar, such as underwater exploration, marine archaeology, and environmental monitoring.
Decentralised Active Perception in Continuous Action Spaces for the Coordinated Escort Problem
May 03, 2023



We consider the coordinated escort problem, where a decentralised team of supporting robots implicitly assist the mission of higher-value principal robots. The defining challenge is how to evaluate the effect of supporting robots' actions on the principal robots' mission. To capture this effect, we define two novel auxiliary reward functions for supporting robots called satisfaction improvement and satisfaction entropy, which computes the improvement in probability of mission success, or the uncertainty thereof. Given these reward functions, we coordinate the entire team of principal and supporting robots using decentralised cross entropy method (Dec-CEM), a new extension of CEM to multi-agent systems based on the product distribution approximation. In a simulated object avoidance scenario, our planning framework demonstrates up to two-fold improvement in task satisfaction against conventional decoupled information gathering.The significance of our results is to introduce a new family of algorithmic problems that will enable important new practical applications of heterogeneous multi-robot systems.
Experiments in Underwater Feature Tracking with Performance Guarantees Using a Small AUV
Oct 05, 2022
We present the results of experiments performed using a small autonomous underwater vehicle to determine the location of an isobath within a bounded area. The primary contribution of this work is to implement and integrate several recent developments real-time planning for environmental mapping, and to demonstrate their utility in a challenging practical example. We model the bathymetry within the operational area using a Gaussian process and propose a reward function that represents the task of mapping a desired isobath. As is common in applications where plans must be continually updated based on real-time sensor measurements, we adopt a receding horizon framework where the vehicle continually computes near-optimal paths. The sequence of paths does not, in general, inherit the optimality properties of each individual path. Our real-time planning implementation incorporates recent results that lead to performance guarantees for receding-horizon planning.
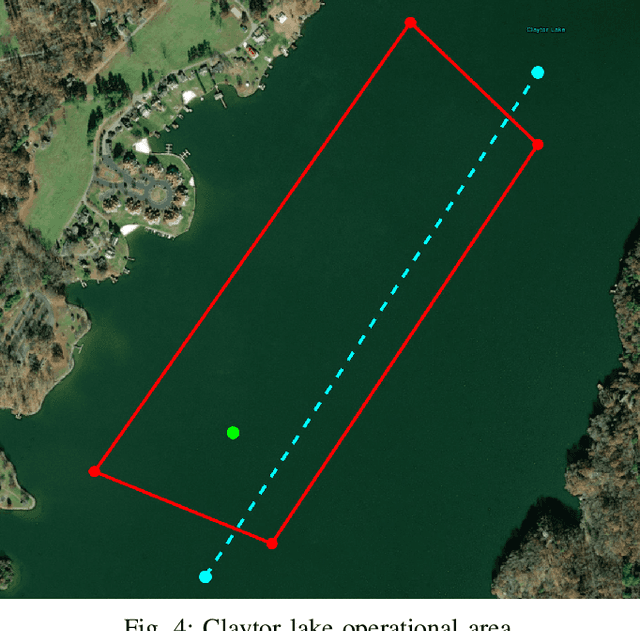
Towards Real-Time Search Planning in Subsea Environments
Jul 24, 2017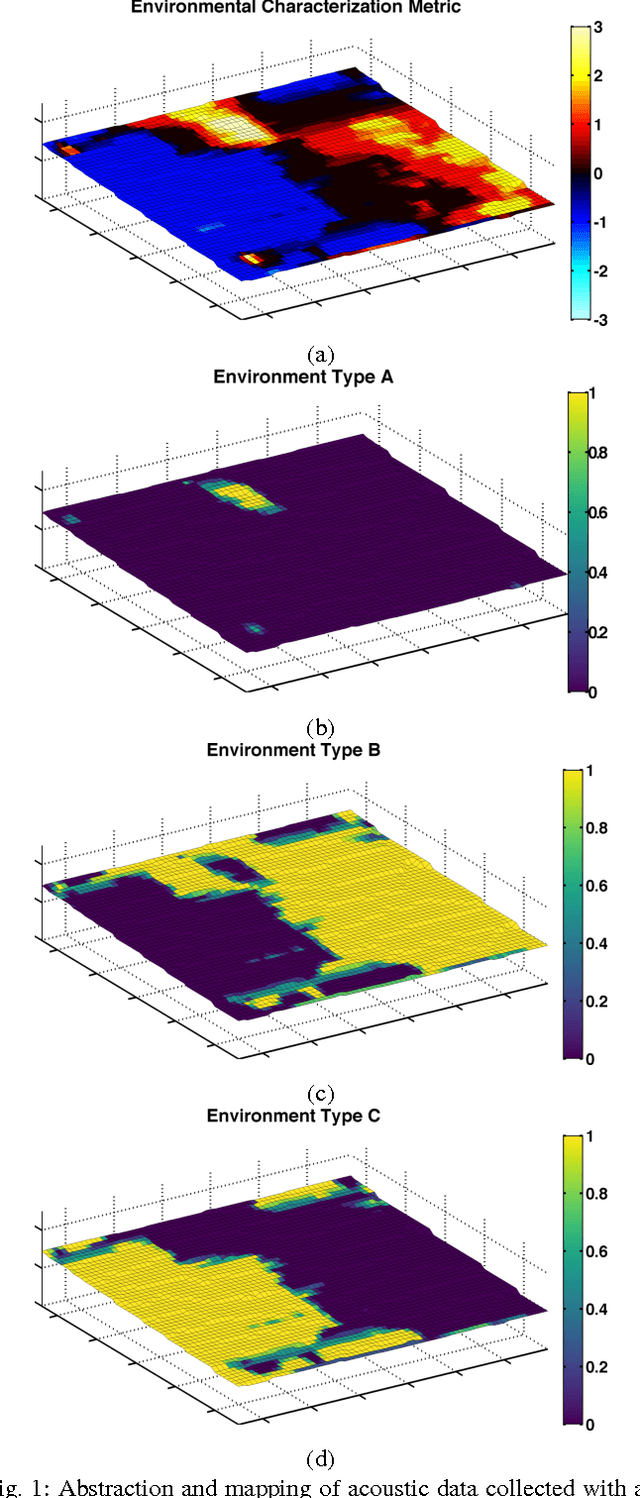
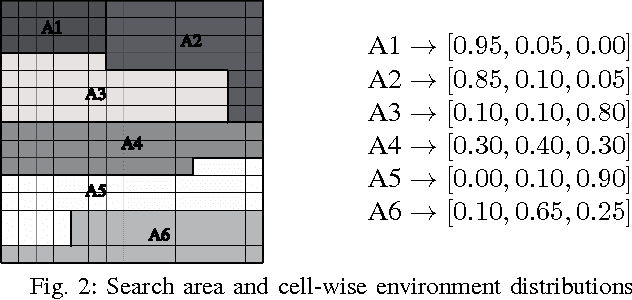
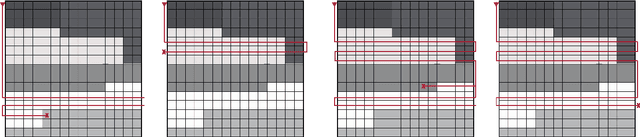
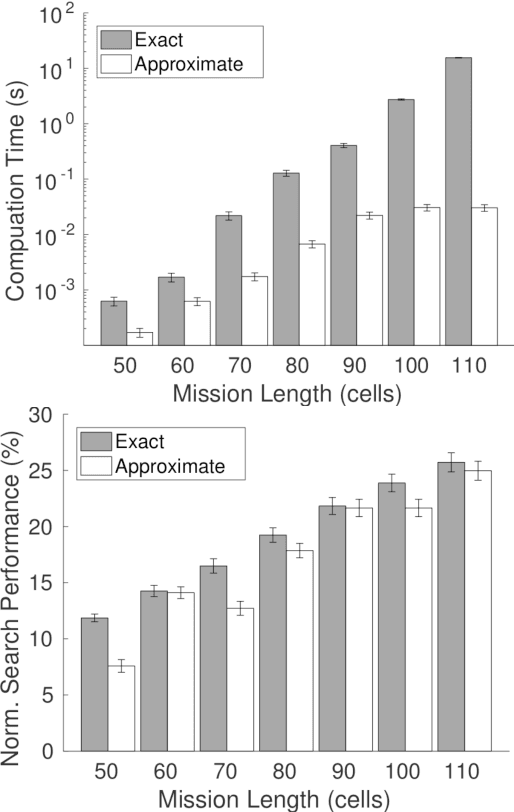
We address the challenge of computing search paths in real-time for subsea applications where the goal is to locate an unknown number of targets on the seafloor. Our approach maximizes a formal definition of search effectiveness given finite search effort. We account for false positive measurements and variation in the performance of the search sensor due to geographic variation of the seafloor. We compare near-optimal search paths that can be computed in real-time with optimal search paths for which real-time computation is infeasible. We show how sonar data acquired for locating targets at a specific location can also be used to characterize the performance of the search sonar at that location. Our approach is illustrated with numerical experiments where search paths are planned using sonar data previously acquired from Boston Harbor.