 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNear-optimal Sensor Placement for Detecting Stochastic Target Trajectories in Barrier Coverage Systems
May 01, 2025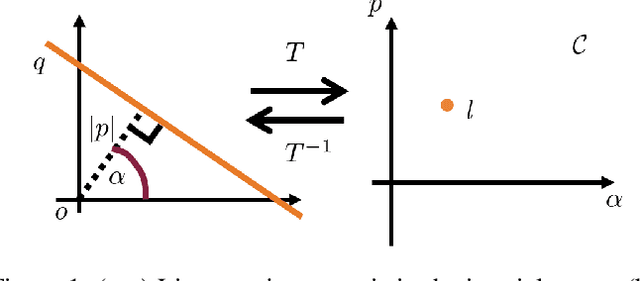
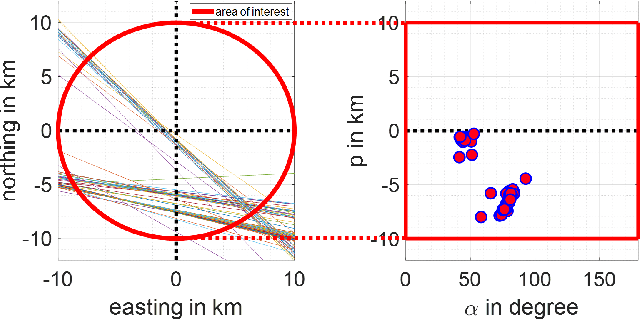
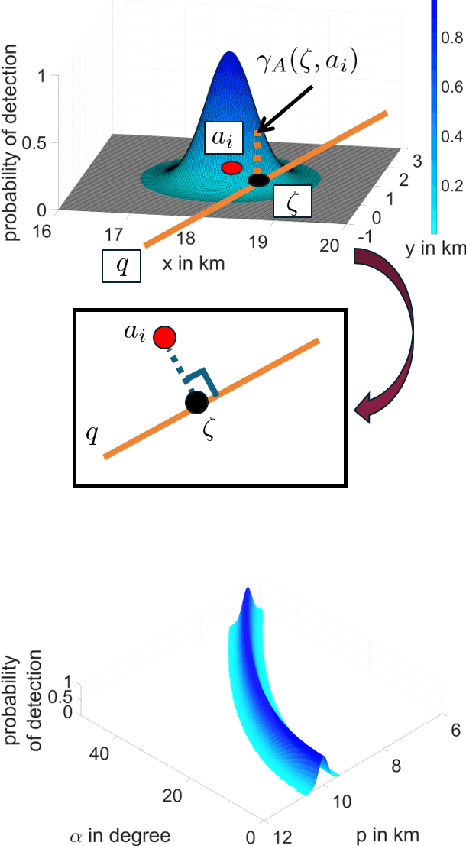
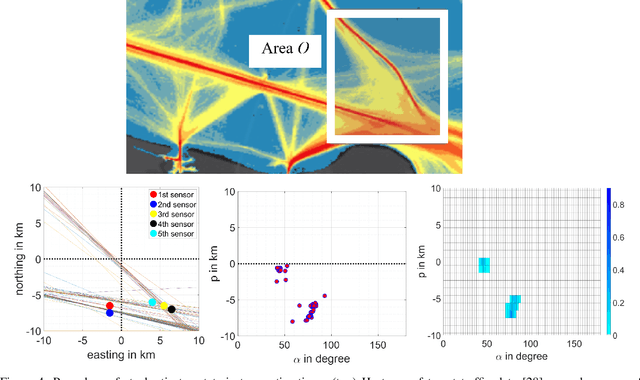
This paper addresses the deployment of sensors for a 2-D barrier coverage system. The challenge is to compute near-optimal sensor placements for detecting targets whose trajectories follow a log-Gaussian Cox line process. We explore sensor deployment in a transformed space, where linear target trajectories are represented as points. While this space simplifies handling the line process, the spatial functions representing sensor performance (i.e. probability of detection) become less intuitive. To illustrate our approach, we focus on positioning sensors of the barrier coverage system on the seafloor to detect passing ships. Through numerical experiments using historical ship data, we compute sensor locations that maximize the probability all ship passing over the barrier coverage system are detected.
Improved Approximation of Sensor Network Performance for Seabed Acoustic Sensors
May 01, 2025Sensor locations to detect Poisson-distributed targets, such as seabed sensors that detect shipping traffic, can be selected to maximize the so-called void probability, which is the probability of detecting all targets. Because evaluation of void probability is computationally expensive, we propose a new approximation of void probability that can greatly reduce the computational cost of selecting locations for a network of sensors. We build upon prior work that approximates void probability using Jensen's inequality. Our new approach better accommodates uncertainty in the (Poisson) target model and yields a sharper error bound. The proposed method is evaluated using historical ship traffic data from the Hampton Roads Channel, Virginia, demonstrating a reduction in the approximation error compared to the previous approach. The results validate the effectiveness of the improved approximation for maritime surveillance applications.
Efficient Feature Mapping Using a Collaborative Team of AUVs
Dec 27, 2024



We present the results of experiments performed using a team of small autonomous underwater vehicles (AUVs) to determine the location of an isobath. The primary contributions of this work are (1) the development of a novel objective function for level set estimation that utilizes a rigorous assessment of uncertainty, and (2) a description of the practical challenges and corresponding solutions needed to implement our approach in the field using a team of AUVs. We combine path planning techniques and an approach to decentralization from prior work that yields theoretical performance guarantees. Experimentation with a team of AUVs provides empirical evidence that the desirable performance guarantees can be preserved in practice even in the presence of limitations that commonly arise in underwater robotics, including slow and intermittent acoustic communications and limited computational resources.
Prediction of Acoustic Communication Performance for AUVs using Gaussian Process Classification
Nov 12, 2024
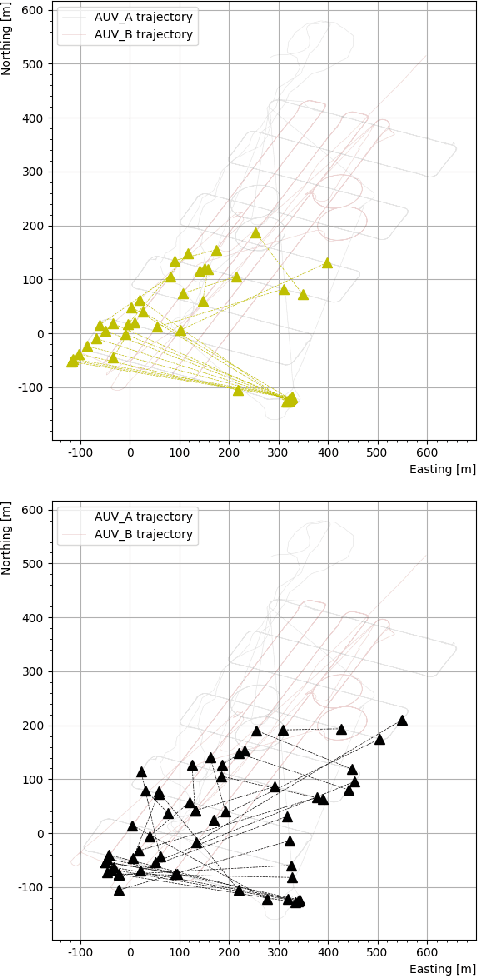
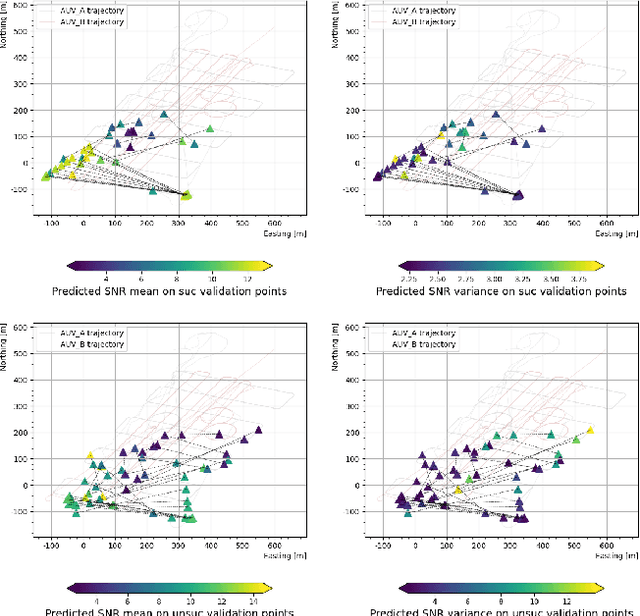
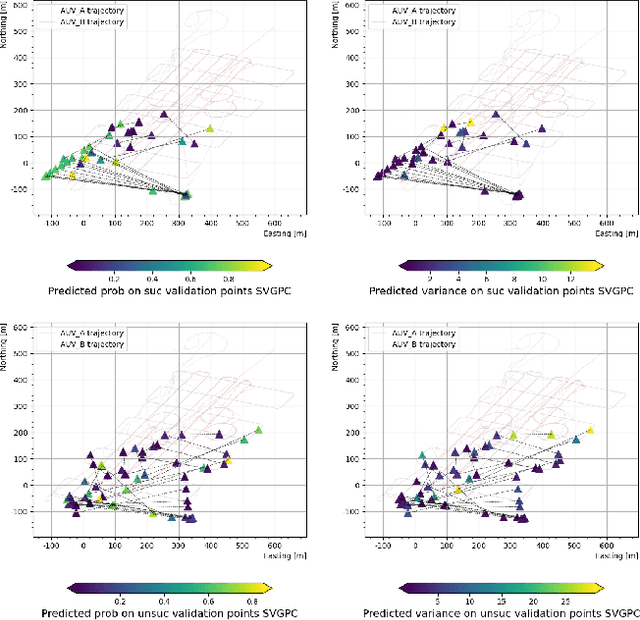
Cooperating autonomous underwater vehicles (AUVs) often rely on acoustic communication to coordinate their actions effectively. However, the reliability of underwater acoustic communication decreases as the communication range between vehicles increases. Consequently, teams of cooperating AUVs typically make conservative assumptions about the maximum range at which they can communicate reliably. To address this limitation, we propose a novel approach that involves learning a map representing the probability of successful communication based on the locations of the transmitting and receiving vehicles. This probabilistic communication map accounts for factors such as the range between vehicles, environmental noise, and multi-path effects at a given location. In pursuit of this goal, we investigate the application of Gaussian process binary classification to generate the desired communication map. We specialize existing results to this specific binary classification problem and explore methods to incorporate uncertainty in vehicle location into the mapping process. Furthermore, we compare the prediction performance of the probability communication map generated using binary classification with that of a signal-to-noise ratio (SNR) communication map generated using Gaussian process regression. Our approach is experimentally validated using communication and navigation data collected during trials with a pair of Virginia Tech 690 AUVs.
Toward optimal placement of spatial sensors
Jul 10, 2023



This paper addresses the challenges of optimally placing a finite number of sensors to detect Poisson-distributed targets in a bounded domain. We seek to rigorously account for uncertainty in the target arrival model throughout the problem. Sensor locations are selected to maximize the probability that no targets are missed. While this objective function is well-suited to applications where failure to detect targets is highly undesirable, it does not lead to a computationally efficient optimization problem. We propose an approximation of the objective function that is non-negative, submodular, and monotone and for which greedy selection of sensor locations works well. We also characterize the gap between the desired objective function and our approximation. For numerical illustrations, we consider the case of the detection of ship traffic using sensors mounted on the seafloor.
Environmental Information Improves Robotic Search Performance
Jun 22, 2018
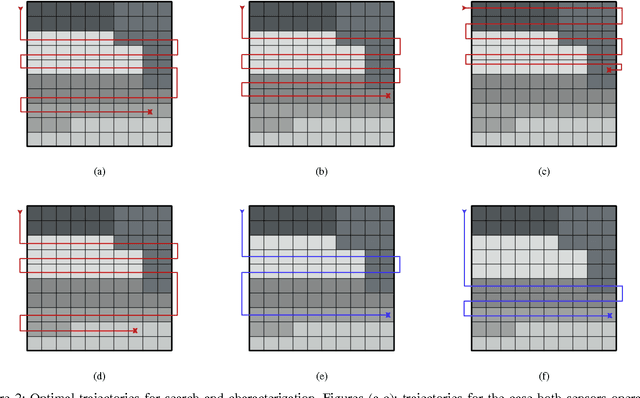
We address the problem where a mobile search agent seeks to find an unknown number of stationary objects distributed in a bounded search domain, and the search mission is subject to time/distance constraint. Our work accounts for false positives, false negatives and environmental uncertainty. We consider the case that the performance of a search sensor is dependent on the environment (e.g., clutter density), and therefore sensor performance is better in some locations than in others. We specifically consider applications where environmental information can be acquired either by a separate vehicle or by the same vehicle that performs the search task. Our main contribution in this study is to formally derive a decision-theoretic cost function to compute the locations where the environmental information should be acquired. For the cases where computing the optimal locations to sample the environment is computationally expensive, we offer an approximation approach that yields provable near-optimal paths. We show that our decision-theoretic cost function outperforms the information-maximization approach, which is often employed in similar applications.
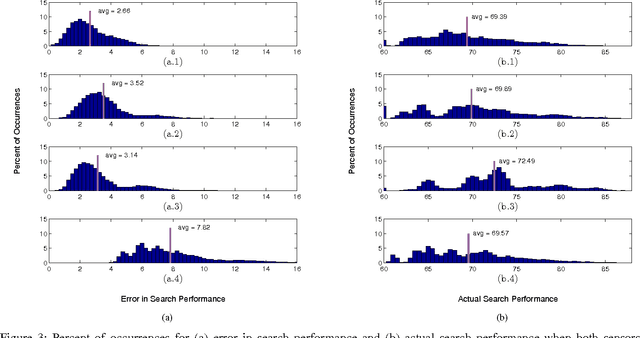
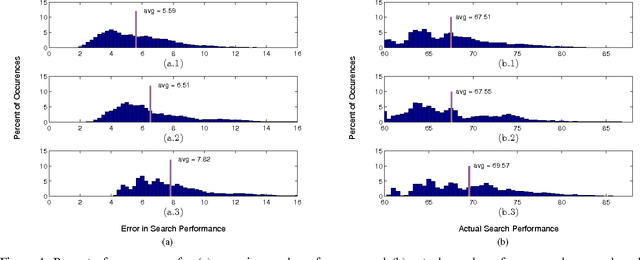
Towards Real-Time Search Planning in Subsea Environments
Jul 24, 2017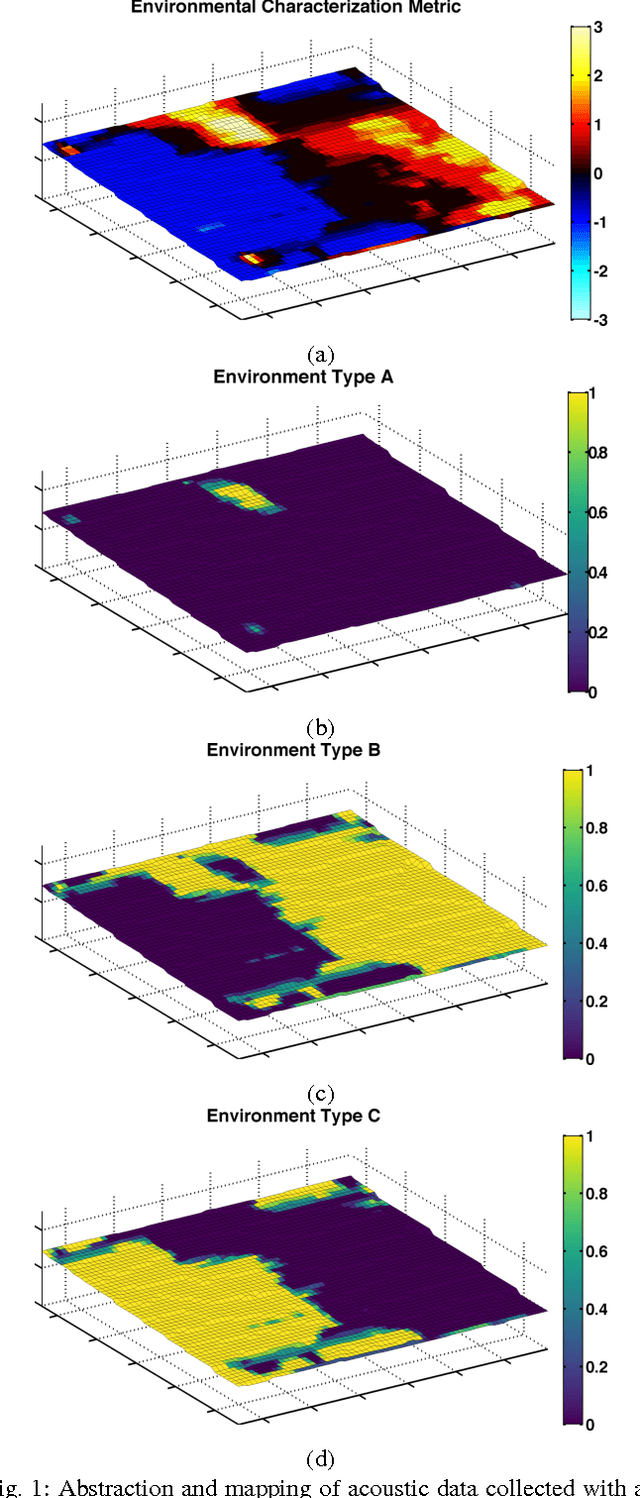
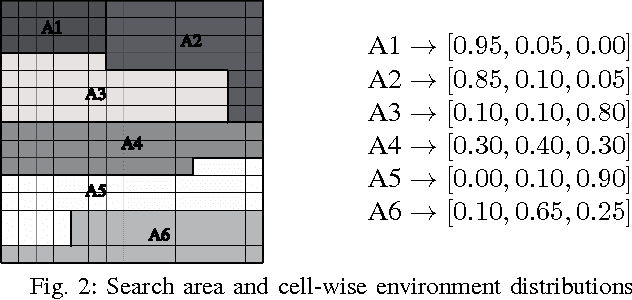
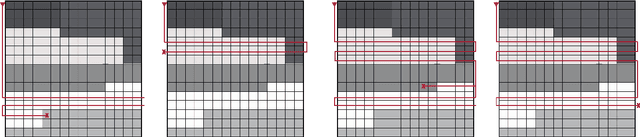
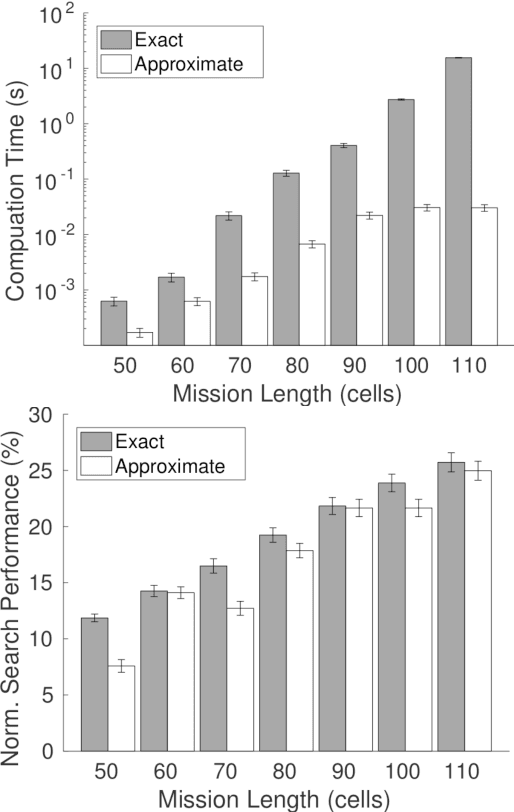
We address the challenge of computing search paths in real-time for subsea applications where the goal is to locate an unknown number of targets on the seafloor. Our approach maximizes a formal definition of search effectiveness given finite search effort. We account for false positive measurements and variation in the performance of the search sensor due to geographic variation of the seafloor. We compare near-optimal search paths that can be computed in real-time with optimal search paths for which real-time computation is infeasible. We show how sonar data acquired for locating targets at a specific location can also be used to characterize the performance of the search sonar at that location. Our approach is illustrated with numerical experiments where search paths are planned using sonar data previously acquired from Boston Harbor.