 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNear-optimal Sensor Placement for Detecting Stochastic Target Trajectories in Barrier Coverage Systems
May 01, 2025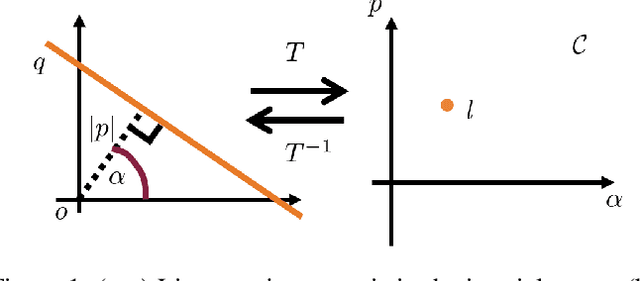
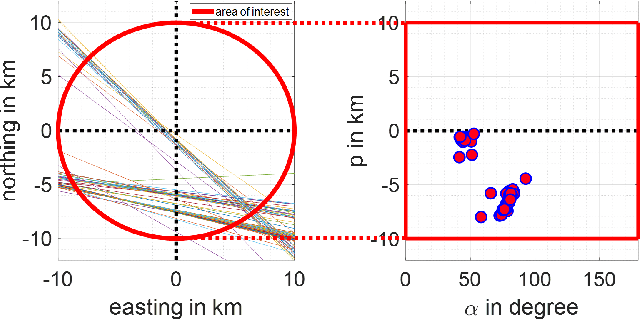
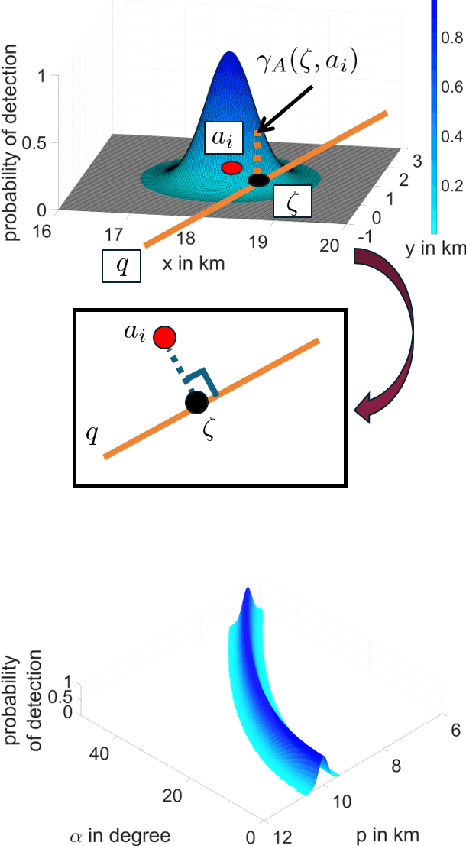
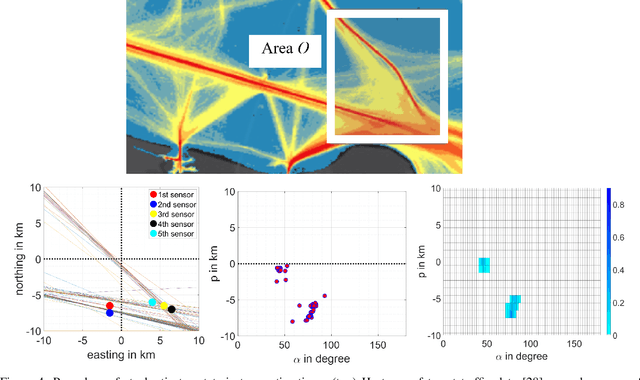
This paper addresses the deployment of sensors for a 2-D barrier coverage system. The challenge is to compute near-optimal sensor placements for detecting targets whose trajectories follow a log-Gaussian Cox line process. We explore sensor deployment in a transformed space, where linear target trajectories are represented as points. While this space simplifies handling the line process, the spatial functions representing sensor performance (i.e. probability of detection) become less intuitive. To illustrate our approach, we focus on positioning sensors of the barrier coverage system on the seafloor to detect passing ships. Through numerical experiments using historical ship data, we compute sensor locations that maximize the probability all ship passing over the barrier coverage system are detected.
Improved Approximation of Sensor Network Performance for Seabed Acoustic Sensors
May 01, 2025Sensor locations to detect Poisson-distributed targets, such as seabed sensors that detect shipping traffic, can be selected to maximize the so-called void probability, which is the probability of detecting all targets. Because evaluation of void probability is computationally expensive, we propose a new approximation of void probability that can greatly reduce the computational cost of selecting locations for a network of sensors. We build upon prior work that approximates void probability using Jensen's inequality. Our new approach better accommodates uncertainty in the (Poisson) target model and yields a sharper error bound. The proposed method is evaluated using historical ship traffic data from the Hampton Roads Channel, Virginia, demonstrating a reduction in the approximation error compared to the previous approach. The results validate the effectiveness of the improved approximation for maritime surveillance applications.
Bayesian Principles Improve Prompt Learning In Vision-Language Models
Apr 19, 2025Prompt learning is a popular fine-tuning method for vision-language models due to its efficiency. It requires a small number of additional learnable parameters while significantly enhancing performance on target tasks. However, most existing methods suffer from overfitting to fine-tuning data, yielding poor generalizability. To address this, we propose a new training objective function based on a Bayesian learning principle to balance adaptability and generalizability. We derive a prior over the logits, where the mean function is parameterized by the pre-trained model, while the posterior corresponds to the fine-tuned model. This objective establishes a balance by allowing the fine-tuned model to adapt to downstream tasks while remaining close to the pre-trained model.
Training-Free Safe Denoisers for Safe Use of Diffusion Models
Feb 11, 2025There is growing concern over the safety of powerful diffusion models (DMs), as they are often misused to produce inappropriate, not-safe-for-work (NSFW) content or generate copyrighted material or data of individuals who wish to be forgotten. Many existing methods tackle these issues by heavily relying on text-based negative prompts or extensively retraining DMs to eliminate certain features or samples. In this paper, we take a radically different approach, directly modifying the sampling trajectory by leveraging a negation set (e.g., unsafe images, copyrighted data, or datapoints needed to be excluded) to avoid specific regions of data distribution, without needing to retrain or fine-tune DMs. We formally derive the relationship between the expected denoised samples that are safe and those that are not safe, leading to our $\textit{safe}$ denoiser which ensures its final samples are away from the area to be negated. Inspired by the derivation, we develop a practical algorithm that successfully produces high-quality samples while avoiding negation areas of the data distribution in text-conditional, class-conditional, and unconditional image generation scenarios. These results hint at the great potential of our training-free safe denoiser for using DMs more safely.
Synergistic Integration of Coordinate Network and Tensorial Feature for Improving Neural Radiance Fields from Sparse Inputs
May 13, 2024The multi-plane representation has been highlighted for its fast training and inference across static and dynamic neural radiance fields. This approach constructs relevant features via projection onto learnable grids and interpolating adjacent vertices. However, it has limitations in capturing low-frequency details and tends to overuse parameters for low-frequency features due to its bias toward fine details, despite its multi-resolution concept. This phenomenon leads to instability and inefficiency when training poses are sparse. In this work, we propose a method that synergistically integrates multi-plane representation with a coordinate-based network known for strong bias toward low-frequency signals. The coordinate-based network is responsible for capturing low-frequency details, while the multi-plane representation focuses on capturing fine-grained details. We demonstrate that using residual connections between them seamlessly preserves their own inherent properties. Additionally, the proposed progressive training scheme accelerates the disentanglement of these two features. We empirically show that the proposed method achieves comparable results to explicit encoding with fewer parameters, and particularly, it outperforms others for the static and dynamic NeRFs under sparse inputs.
Toward optimal placement of spatial sensors
Jul 10, 2023



This paper addresses the challenges of optimally placing a finite number of sensors to detect Poisson-distributed targets in a bounded domain. We seek to rigorously account for uncertainty in the target arrival model throughout the problem. Sensor locations are selected to maximize the probability that no targets are missed. While this objective function is well-suited to applications where failure to detect targets is highly undesirable, it does not lead to a computationally efficient optimization problem. We propose an approximation of the objective function that is non-negative, submodular, and monotone and for which greedy selection of sensor locations works well. We also characterize the gap between the desired objective function and our approximation. For numerical illustrations, we consider the case of the detection of ship traffic using sensors mounted on the seafloor.
The StarCraft Multi-Agent Challenges+ : Learning of Multi-Stage Tasks and Environmental Factors without Precise Reward Functions
Jul 07, 2022
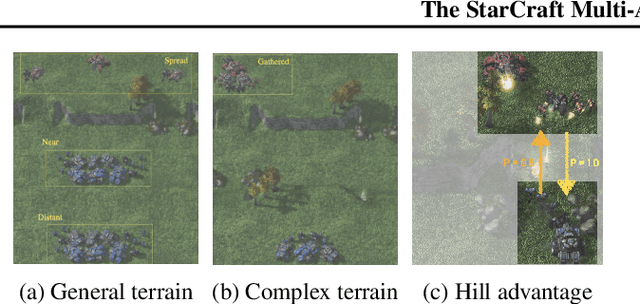

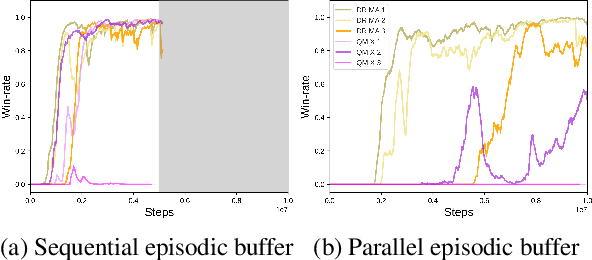
In this paper, we propose a novel benchmark called the StarCraft Multi-Agent Challenges+, where agents learn to perform multi-stage tasks and to use environmental factors without precise reward functions. The previous challenges (SMAC) recognized as a standard benchmark of Multi-Agent Reinforcement Learning are mainly concerned with ensuring that all agents cooperatively eliminate approaching adversaries only through fine manipulation with obvious reward functions. This challenge, on the other hand, is interested in the exploration capability of MARL algorithms to efficiently learn implicit multi-stage tasks and environmental factors as well as micro-control. This study covers both offensive and defensive scenarios. In the offensive scenarios, agents must learn to first find opponents and then eliminate them. The defensive scenarios require agents to use topographic features. For example, agents need to position themselves behind protective structures to make it harder for enemies to attack. We investigate MARL algorithms under SMAC+ and observe that recent approaches work well in similar settings to the previous challenges, but misbehave in offensive scenarios. Additionally, we observe that an enhanced exploration approach has a positive effect on performance but is not able to completely solve all scenarios. This study proposes new directions for future research.
Neural Processes with Stochastic Attention: Paying more attention to the context dataset
Apr 11, 2022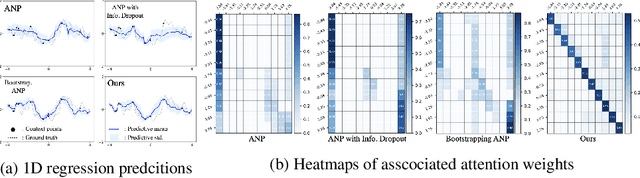
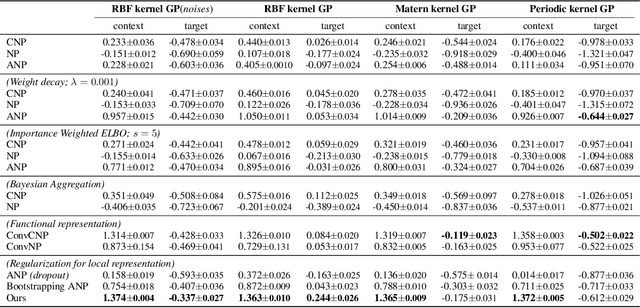
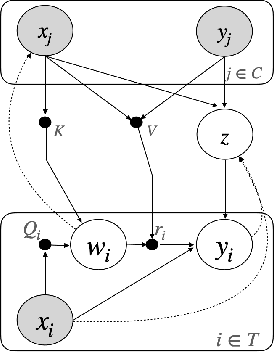
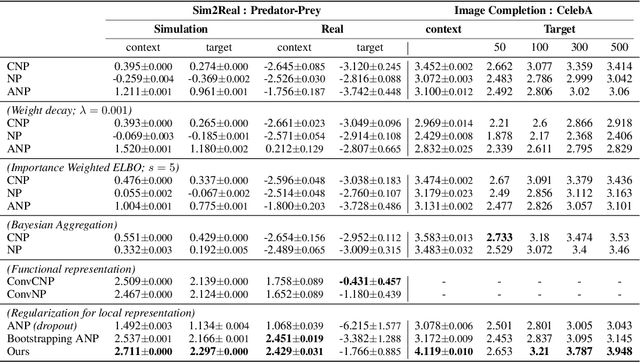
Neural processes (NPs) aim to stochastically complete unseen data points based on a given context dataset. NPs essentially leverage a given dataset as a context representation to derive a suitable identifier for a novel task. To improve the prediction accuracy, many variants of NPs have investigated context embedding approaches that generally design novel network architectures and aggregation functions satisfying permutation invariant. In this work, we propose a stochastic attention mechanism for NPs to capture appropriate context information. From the perspective of information theory, we demonstrate that the proposed method encourages context embedding to be differentiated from a target dataset, allowing NPs to consider features in a target dataset and context embedding independently. We observe that the proposed method can appropriately capture context embedding even under noisy data sets and restricted task distributions, where typical NPs suffer from a lack of context embeddings. We empirically show that our approach substantially outperforms conventional NPs in various domains through 1D regression, predator-prey model, and image completion. Moreover, the proposed method is also validated by MovieLens-10k dataset, a real-world problem.