 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Gaussian Process Classification and an Application in Subsea Robotics
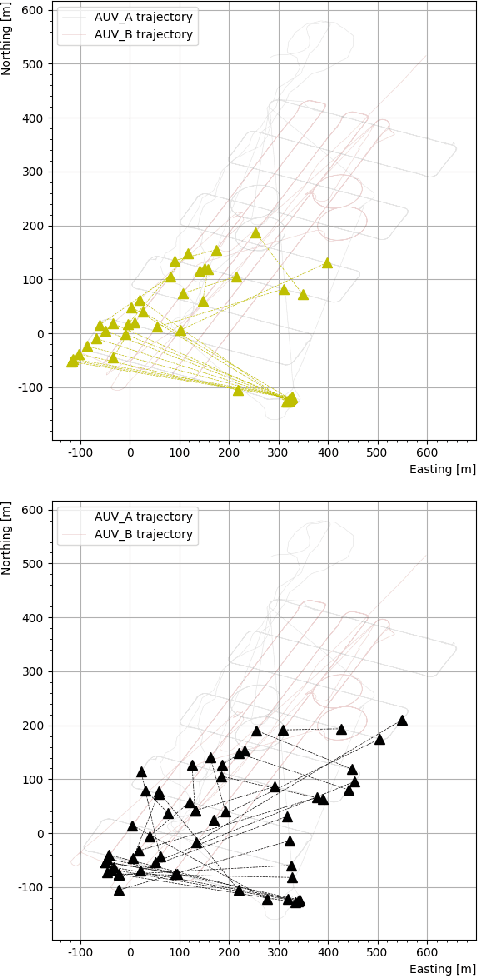
Nov 19, 2025Teams of cooperating autonomous underwater vehicles (AUVs) rely on acoustic communication for coordination, yet this communication medium is constrained by limited range, multi-path effects, and low bandwidth. One way to address the uncertainty associated with acoustic communication is to learn the communication environment in real-time. We address the challenge of a team of robots building a map of the probability of communication success from one location to another in real-time. This is a decentralized classification problem -- communication events are either successful or unsuccessful -- where AUVs share a subset of their communication measurements to build the map. The main contribution of this work is a rigorously derived data sharing policy that selects measurements to be shared among AUVs. We experimentally validate our proposed sharing policy using real acoustic communication data collected from teams of Virginia Tech 690 AUVs, demonstrating its effectiveness in underwater environments.
Improved Approximation of Sensor Network Performance for Seabed Acoustic Sensors
May 01, 2025Sensor locations to detect Poisson-distributed targets, such as seabed sensors that detect shipping traffic, can be selected to maximize the so-called void probability, which is the probability of detecting all targets. Because evaluation of void probability is computationally expensive, we propose a new approximation of void probability that can greatly reduce the computational cost of selecting locations for a network of sensors. We build upon prior work that approximates void probability using Jensen's inequality. Our new approach better accommodates uncertainty in the (Poisson) target model and yields a sharper error bound. The proposed method is evaluated using historical ship traffic data from the Hampton Roads Channel, Virginia, demonstrating a reduction in the approximation error compared to the previous approach. The results validate the effectiveness of the improved approximation for maritime surveillance applications.
Near-optimal Sensor Placement for Detecting Stochastic Target Trajectories in Barrier Coverage Systems
May 01, 2025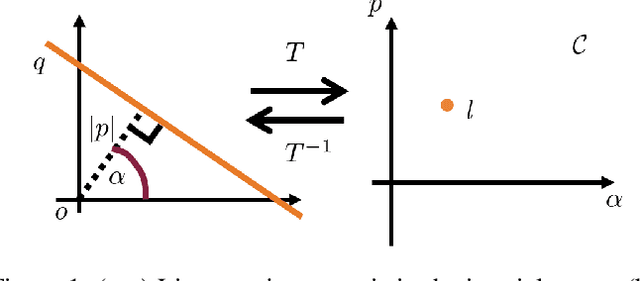
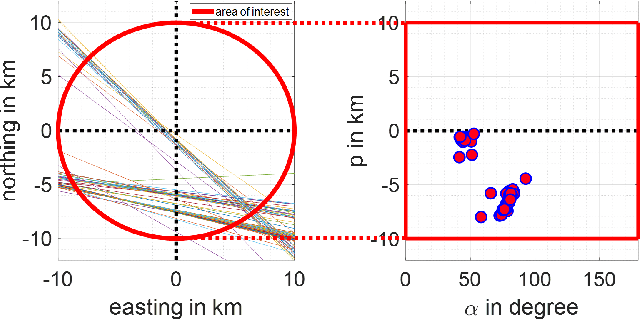
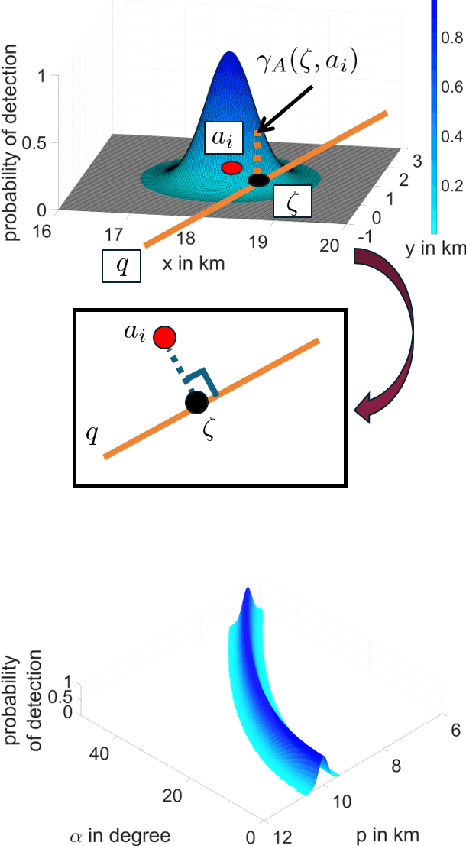
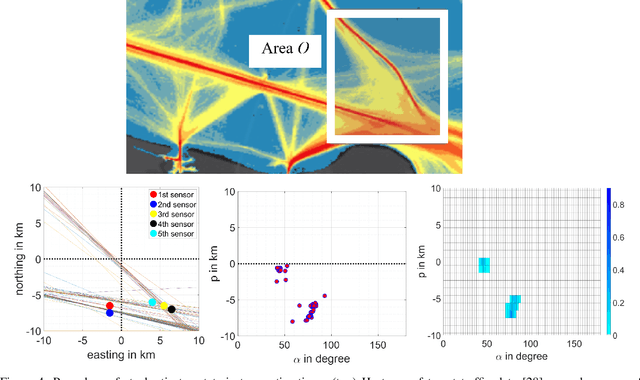
This paper addresses the deployment of sensors for a 2-D barrier coverage system. The challenge is to compute near-optimal sensor placements for detecting targets whose trajectories follow a log-Gaussian Cox line process. We explore sensor deployment in a transformed space, where linear target trajectories are represented as points. While this space simplifies handling the line process, the spatial functions representing sensor performance (i.e. probability of detection) become less intuitive. To illustrate our approach, we focus on positioning sensors of the barrier coverage system on the seafloor to detect passing ships. Through numerical experiments using historical ship data, we compute sensor locations that maximize the probability all ship passing over the barrier coverage system are detected.
Efficient Feature Mapping Using a Collaborative Team of AUVs
Dec 27, 2024



We present the results of experiments performed using a team of small autonomous underwater vehicles (AUVs) to determine the location of an isobath. The primary contributions of this work are (1) the development of a novel objective function for level set estimation that utilizes a rigorous assessment of uncertainty, and (2) a description of the practical challenges and corresponding solutions needed to implement our approach in the field using a team of AUVs. We combine path planning techniques and an approach to decentralization from prior work that yields theoretical performance guarantees. Experimentation with a team of AUVs provides empirical evidence that the desirable performance guarantees can be preserved in practice even in the presence of limitations that commonly arise in underwater robotics, including slow and intermittent acoustic communications and limited computational resources.
Prediction of Acoustic Communication Performance for AUVs using Gaussian Process Classification
Nov 12, 2024
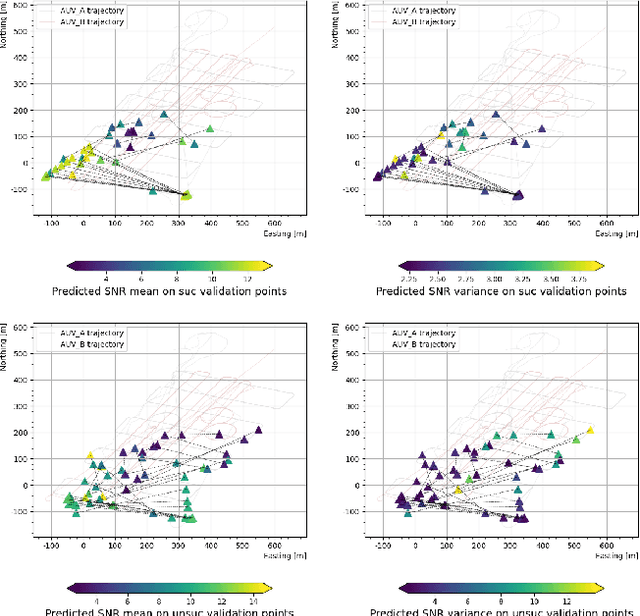
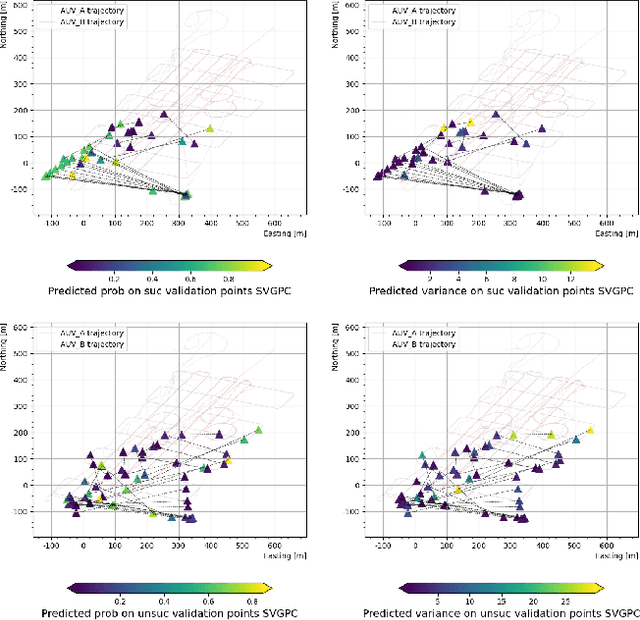
Cooperating autonomous underwater vehicles (AUVs) often rely on acoustic communication to coordinate their actions effectively. However, the reliability of underwater acoustic communication decreases as the communication range between vehicles increases. Consequently, teams of cooperating AUVs typically make conservative assumptions about the maximum range at which they can communicate reliably. To address this limitation, we propose a novel approach that involves learning a map representing the probability of successful communication based on the locations of the transmitting and receiving vehicles. This probabilistic communication map accounts for factors such as the range between vehicles, environmental noise, and multi-path effects at a given location. In pursuit of this goal, we investigate the application of Gaussian process binary classification to generate the desired communication map. We specialize existing results to this specific binary classification problem and explore methods to incorporate uncertainty in vehicle location into the mapping process. Furthermore, we compare the prediction performance of the probability communication map generated using binary classification with that of a signal-to-noise ratio (SNR) communication map generated using Gaussian process regression. Our approach is experimentally validated using communication and navigation data collected during trials with a pair of Virginia Tech 690 AUVs.
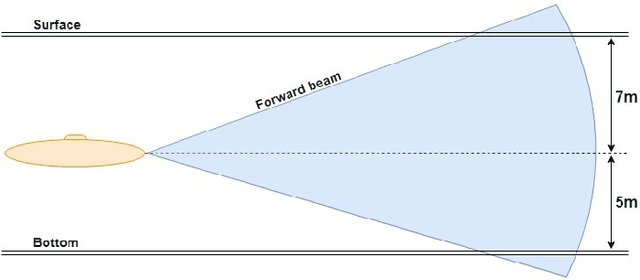
Use of a low-cost forward-looking sonar for collision avoidance in small AUVs, analysis and experimental results
Sep 11, 2023In this paper, we seek to evaluate the effectiveness of a novel forward-looking sonar system with a limited number of beams for collision avoidance for small autonomous underwater vehicles (AUVs). We present a collision avoidance strategy specifically designed for a novel forward-looking sonar system based on posterior expected loss, explicitly coupling the obstacle detection, collision avoidance, and planning. We demonstrate the strategy with field trials using the 690 AUV, built by the Center for Marine Autonomy and Robotics at Virginia Tech, and verify the forward-looking sonar system using a prototype sonar with nine beams. Post-processed simulations are performed while changing parameters in the sensitivity of the system to demonstrate the trade-off between the detection and false alarm rates.
Toward optimal placement of spatial sensors
Jul 10, 2023



This paper addresses the challenges of optimally placing a finite number of sensors to detect Poisson-distributed targets in a bounded domain. We seek to rigorously account for uncertainty in the target arrival model throughout the problem. Sensor locations are selected to maximize the probability that no targets are missed. While this objective function is well-suited to applications where failure to detect targets is highly undesirable, it does not lead to a computationally efficient optimization problem. We propose an approximation of the objective function that is non-negative, submodular, and monotone and for which greedy selection of sensor locations works well. We also characterize the gap between the desired objective function and our approximation. For numerical illustrations, we consider the case of the detection of ship traffic using sensors mounted on the seafloor.
Unscented Kalman Filtering on Manifolds for AUV Navigation -- Experimental Results
Oct 12, 2022
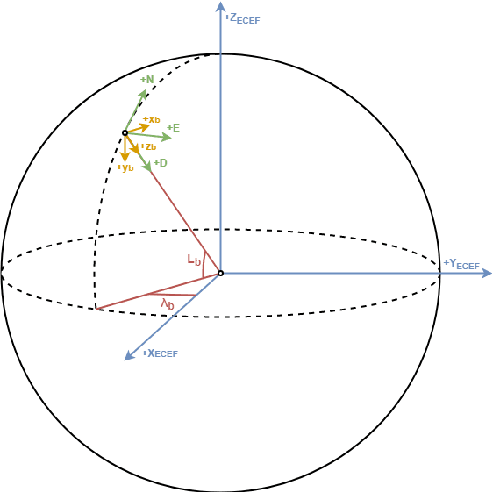

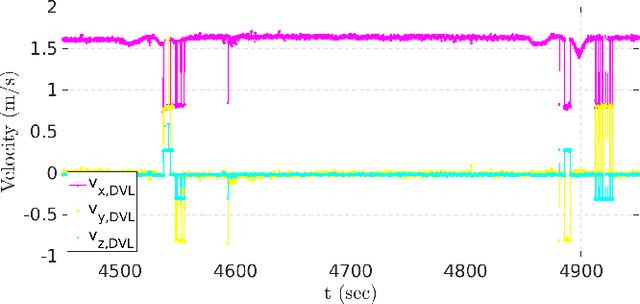
In this work, we present an aided inertial navigation system for an autonomous underwater vehicle (AUV) using an unscented Kalman filter on manifolds (UKF-M). The inertial navigation estimate is aided by a Doppler velocity log (DVL), depth sensor, acoustic range and, while on the surface, GPS. The sensor model for each navigation sensor on the AUV is explicitly described, including compensation for lever arm offsets between the IMU and each sensor. Additionally, an outlier rejection step is proposed to reject measurement outliers that would degrade navigation performance. The UKF-M for AUV navigation is implemented for real-time navigation on the Virginia Tech 690 AUV and validated in the field. Finally, by post-processing the navigation sensor data, we show experimentally that the UKF-M is able to converge to the correct heading in the presence of arbitrarily large initial heading error.
Development of a Simulation Environment for Evaluation of a Forward Looking Sonar System for Small AUVs
Oct 12, 2022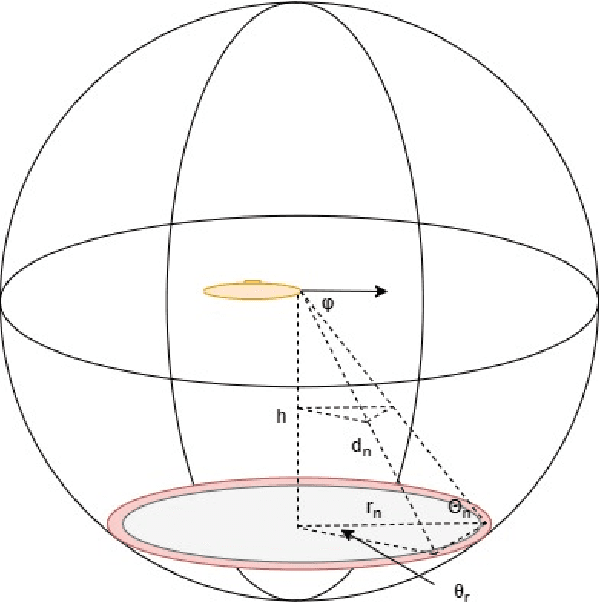

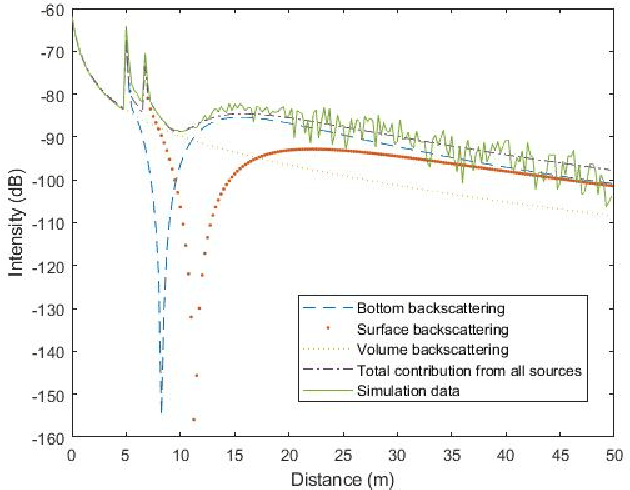
This paper describes a high-fidelity sonar model and a simulation environment that implements the model. The model and simulation environment have been developed to aid in the design of a forward looking sonar for autonomous underwater vehicles (AUVs). The simulator achieves real-time visualization through ray tracing and approximation. The simulator facilitates the assessment of sonar design choices, such as beam pattern and beam location, and assessment of obstacle detection and tracking algorithms. An obstacle detection model is proposed for which the null hypothesis is estimated from the environmental model. Sonar data is generated from the simulator and compared to the expected results from the detection model demonstrating the benefits and limitations of the proposed approach.
Evaluating the Benefit of Using Multiple Low-Cost Forward-Looking Sonar Beams for Collision Avoidance in Small AUVs
Oct 12, 2022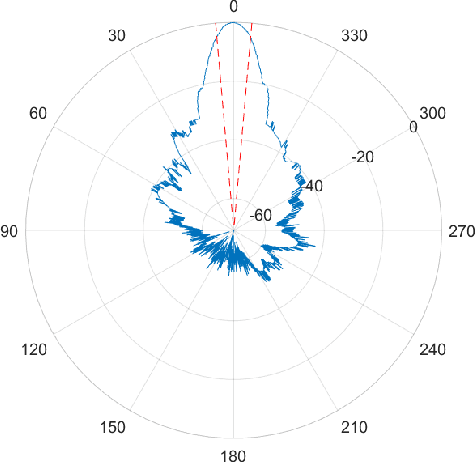
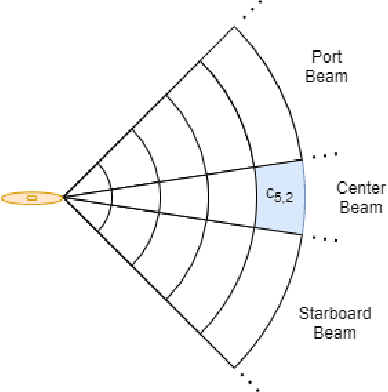
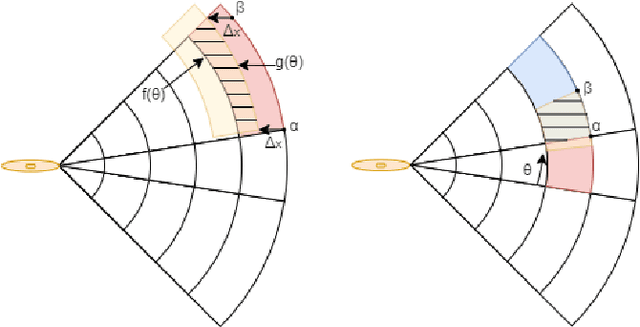
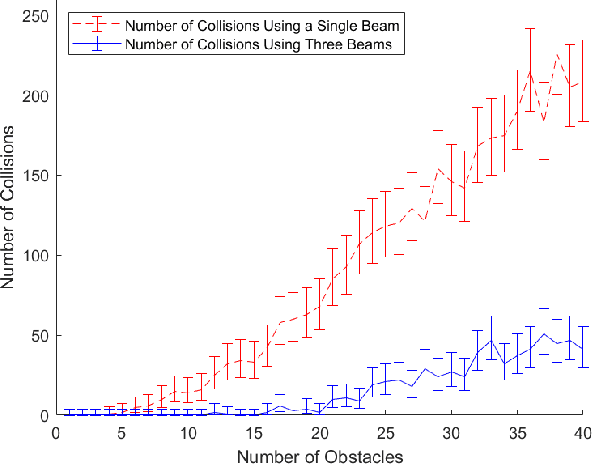
We seek to rigorously evaluate the benefit of using a few beams rather than a single beam for a low-cost obstacle avoidance sonar for small AUVs. For a small low-cost AUV, the complexity, cost, and volume required for a multi-beam forward looking sonar are prohibitive. In contrast, a single-beam system is relatively easy to integrate into a small AUV, but does not provide the performance of a multi-beam solution. To better understand this trade-off, we seek to rigorously quantify the improvement with respect to obstacle avoidance performance of adding just a few beams to a single-beam forward looking sonar relative to the performance of the single-beam system. Our work fundamentally supports the goal of using small low-cost AUV systems in cluttered and unstructured environments. Specifically, we investigate the benefit of incorporating a port and starboard beam to a single-beam sonar system for collision avoidance. A methodology for collision avoidance is developed to obtain a fair comparison between a single-beam and multi-beam system, explicitly incorporating the geometry of the beam patterns from forward-looking sonars with large beam angles, and simulated using a high-fidelity representation of acoustic signal propagation.