 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUse of a low-cost forward-looking sonar for collision avoidance in small AUVs, analysis and experimental results
Sep 11, 2023In this paper, we seek to evaluate the effectiveness of a novel forward-looking sonar system with a limited number of beams for collision avoidance for small autonomous underwater vehicles (AUVs). We present a collision avoidance strategy specifically designed for a novel forward-looking sonar system based on posterior expected loss, explicitly coupling the obstacle detection, collision avoidance, and planning. We demonstrate the strategy with field trials using the 690 AUV, built by the Center for Marine Autonomy and Robotics at Virginia Tech, and verify the forward-looking sonar system using a prototype sonar with nine beams. Post-processed simulations are performed while changing parameters in the sensitivity of the system to demonstrate the trade-off between the detection and false alarm rates.
Evaluating the Benefit of Using Multiple Low-Cost Forward-Looking Sonar Beams for Collision Avoidance in Small AUVs
Oct 12, 2022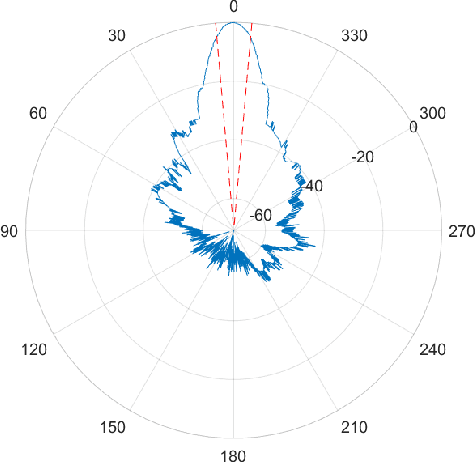
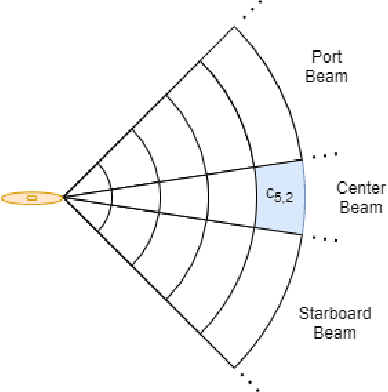
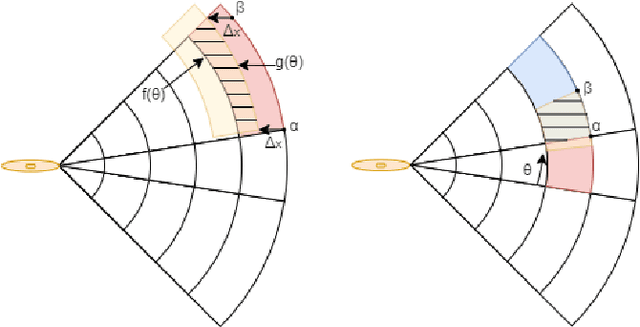
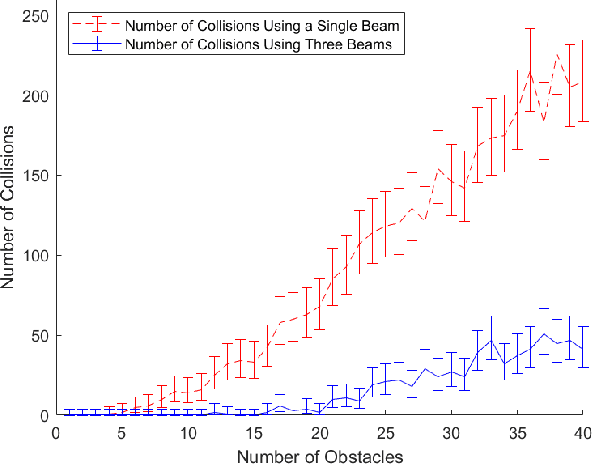
We seek to rigorously evaluate the benefit of using a few beams rather than a single beam for a low-cost obstacle avoidance sonar for small AUVs. For a small low-cost AUV, the complexity, cost, and volume required for a multi-beam forward looking sonar are prohibitive. In contrast, a single-beam system is relatively easy to integrate into a small AUV, but does not provide the performance of a multi-beam solution. To better understand this trade-off, we seek to rigorously quantify the improvement with respect to obstacle avoidance performance of adding just a few beams to a single-beam forward looking sonar relative to the performance of the single-beam system. Our work fundamentally supports the goal of using small low-cost AUV systems in cluttered and unstructured environments. Specifically, we investigate the benefit of incorporating a port and starboard beam to a single-beam sonar system for collision avoidance. A methodology for collision avoidance is developed to obtain a fair comparison between a single-beam and multi-beam system, explicitly incorporating the geometry of the beam patterns from forward-looking sonars with large beam angles, and simulated using a high-fidelity representation of acoustic signal propagation.
Development of a Simulation Environment for Evaluation of a Forward Looking Sonar System for Small AUVs
Oct 12, 2022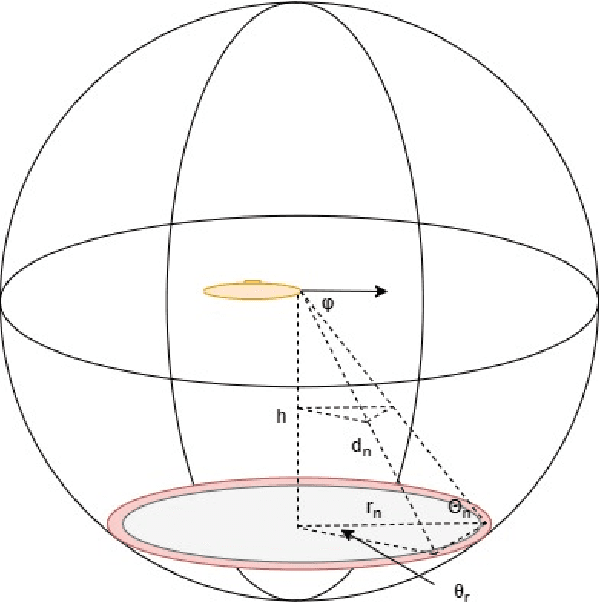

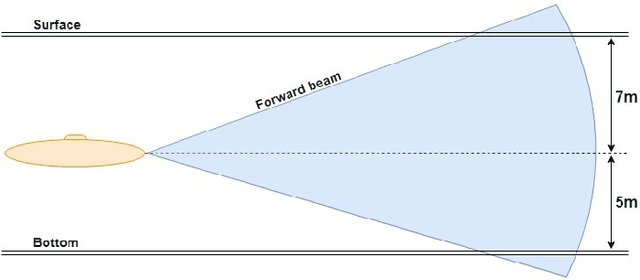
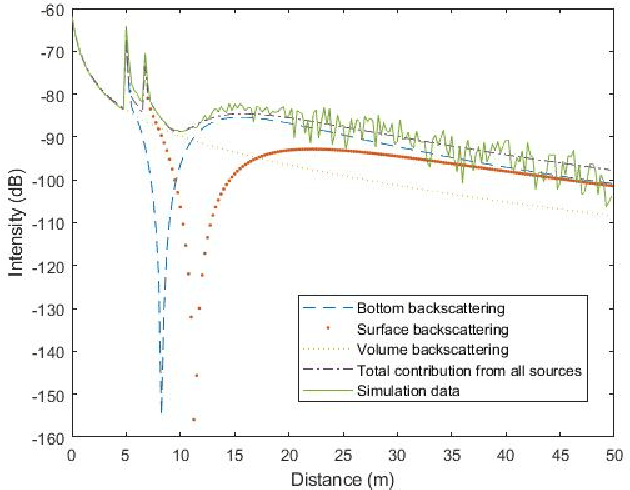
This paper describes a high-fidelity sonar model and a simulation environment that implements the model. The model and simulation environment have been developed to aid in the design of a forward looking sonar for autonomous underwater vehicles (AUVs). The simulator achieves real-time visualization through ray tracing and approximation. The simulator facilitates the assessment of sonar design choices, such as beam pattern and beam location, and assessment of obstacle detection and tracking algorithms. An obstacle detection model is proposed for which the null hypothesis is estimated from the environmental model. Sonar data is generated from the simulator and compared to the expected results from the detection model demonstrating the benefits and limitations of the proposed approach.