 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUse of a low-cost forward-looking sonar for collision avoidance in small AUVs, analysis and experimental results
Sep 11, 2023In this paper, we seek to evaluate the effectiveness of a novel forward-looking sonar system with a limited number of beams for collision avoidance for small autonomous underwater vehicles (AUVs). We present a collision avoidance strategy specifically designed for a novel forward-looking sonar system based on posterior expected loss, explicitly coupling the obstacle detection, collision avoidance, and planning. We demonstrate the strategy with field trials using the 690 AUV, built by the Center for Marine Autonomy and Robotics at Virginia Tech, and verify the forward-looking sonar system using a prototype sonar with nine beams. Post-processed simulations are performed while changing parameters in the sensitivity of the system to demonstrate the trade-off between the detection and false alarm rates.
Unscented Kalman Filtering on Manifolds for AUV Navigation -- Experimental Results
Oct 12, 2022
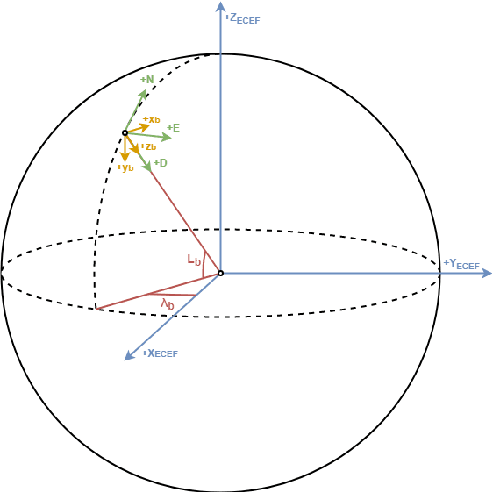

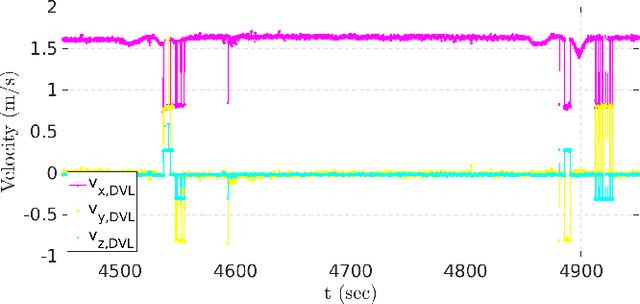
In this work, we present an aided inertial navigation system for an autonomous underwater vehicle (AUV) using an unscented Kalman filter on manifolds (UKF-M). The inertial navigation estimate is aided by a Doppler velocity log (DVL), depth sensor, acoustic range and, while on the surface, GPS. The sensor model for each navigation sensor on the AUV is explicitly described, including compensation for lever arm offsets between the IMU and each sensor. Additionally, an outlier rejection step is proposed to reject measurement outliers that would degrade navigation performance. The UKF-M for AUV navigation is implemented for real-time navigation on the Virginia Tech 690 AUV and validated in the field. Finally, by post-processing the navigation sensor data, we show experimentally that the UKF-M is able to converge to the correct heading in the presence of arbitrarily large initial heading error.