 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Real-Time Search Planning in Subsea Environments
Jul 24, 2017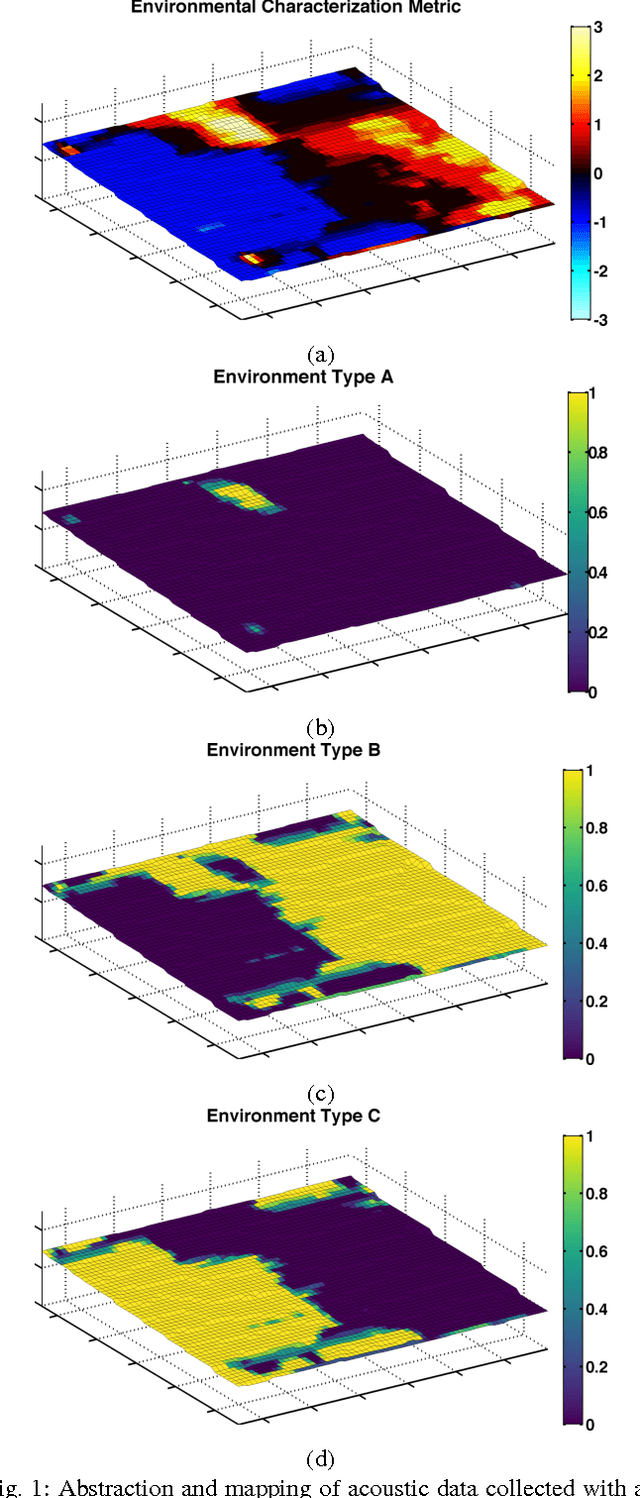
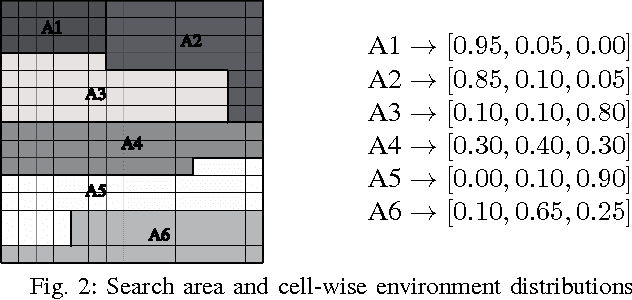
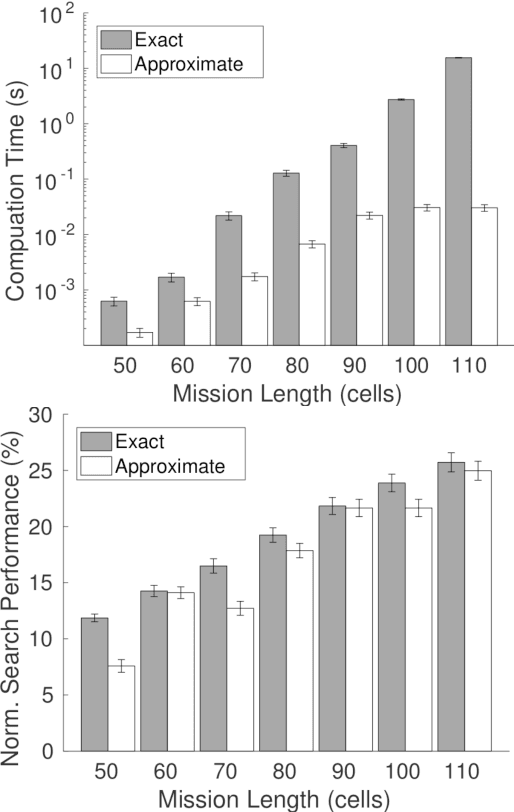
We address the challenge of computing search paths in real-time for subsea applications where the goal is to locate an unknown number of targets on the seafloor. Our approach maximizes a formal definition of search effectiveness given finite search effort. We account for false positive measurements and variation in the performance of the search sensor due to geographic variation of the seafloor. We compare near-optimal search paths that can be computed in real-time with optimal search paths for which real-time computation is infeasible. We show how sonar data acquired for locating targets at a specific location can also be used to characterize the performance of the search sonar at that location. Our approach is illustrated with numerical experiments where search paths are planned using sonar data previously acquired from Boston Harbor.