 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion planning in task space with Gromov-Hausdorff approximations
Paper and Code
Sep 11, 2022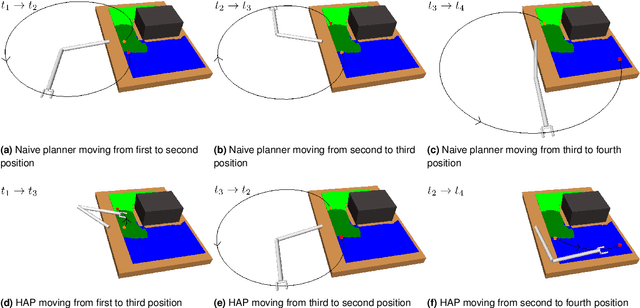
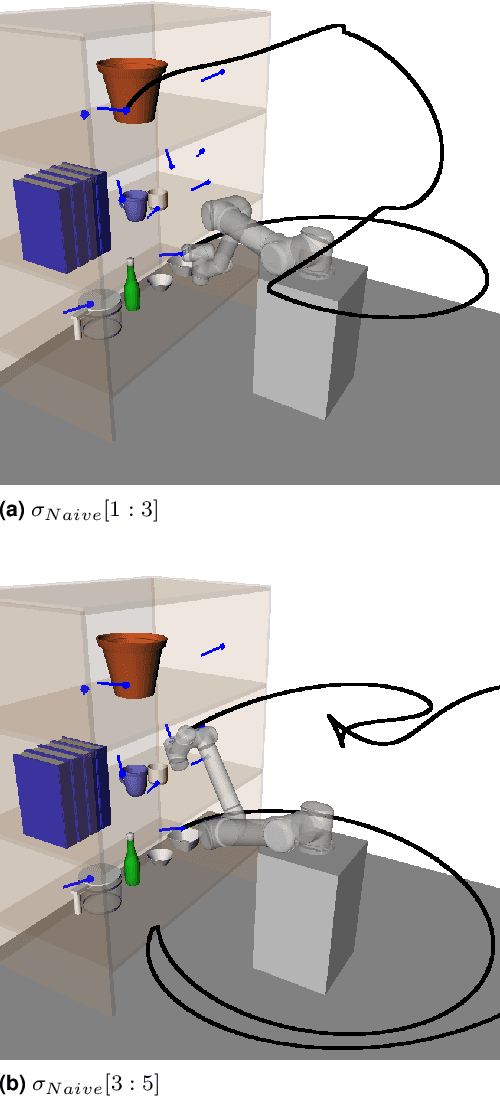
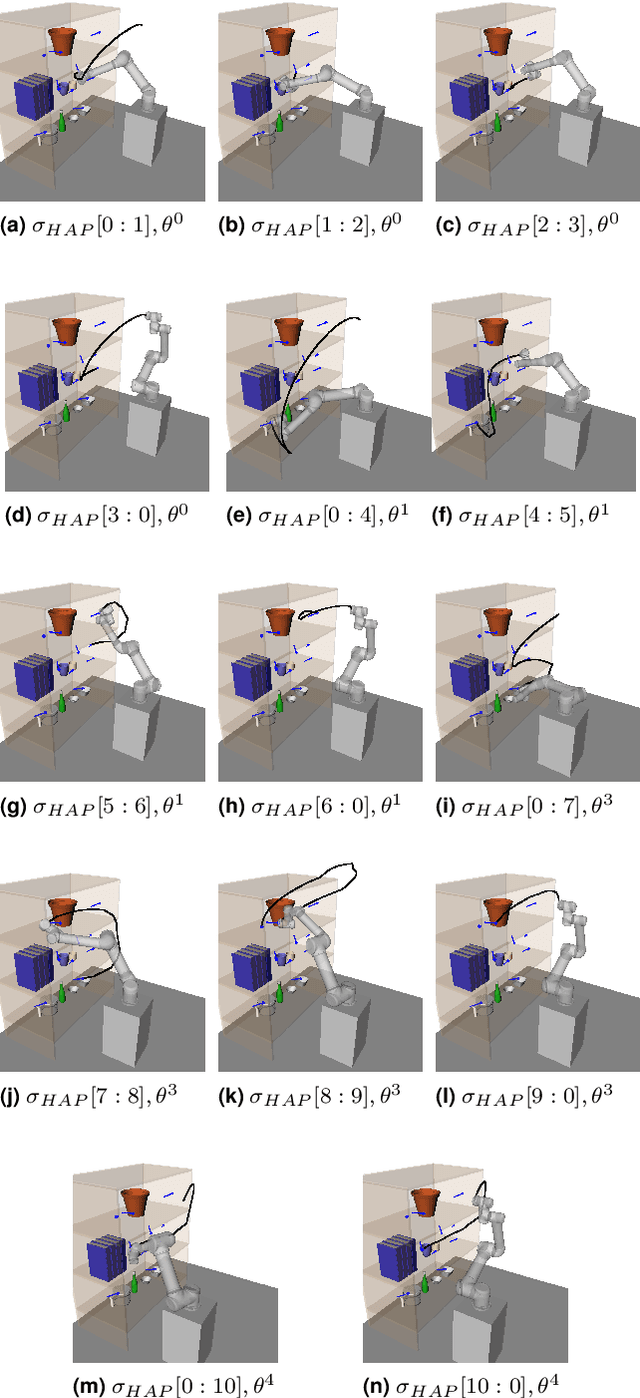
Applications of industrial robotic manipulators such as cobots can require efficient online motion planning in environments that have a combination of static and non-static obstacles. Existing general purpose planning methods often produce poor quality solutions when available computation time is restricted, or fail to produce a solution entirely. We propose a new motion planning framework designed to operate in a user-defined task space, as opposed to the robot's workspace, that intentionally trades off workspace generality for planning and execution time efficiency. Our framework automatically constructs trajectory libraries that are queried online, similar to previous methods that exploit offline computation. Importantly, our method also offers bounded suboptimality guarantees on trajectory length. The key idea is to establish approximate isometries known as $\epsilon$-Gromov-Hausdorff approximations such that points that are close by in task space are also close in configuration space. These bounding relations further imply that trajectories can be smoothly concatenated, which enables our framework to address batch-query scenarios where the objective is to find a minimum length sequence of trajectories that visit an unordered set of goals. We evaluate our framework in simulation with several kinematic configurations, including a manipulator mounted to a mobile base. Results demonstrate that our method achieves feasible real-time performance for practical applications and suggest interesting opportunities for extending its capabilities.