 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-function Robotized Surgical Dissector for Endoscopic Pulmonary Thromboendarterectomy: Preclinical Study and Evaluation
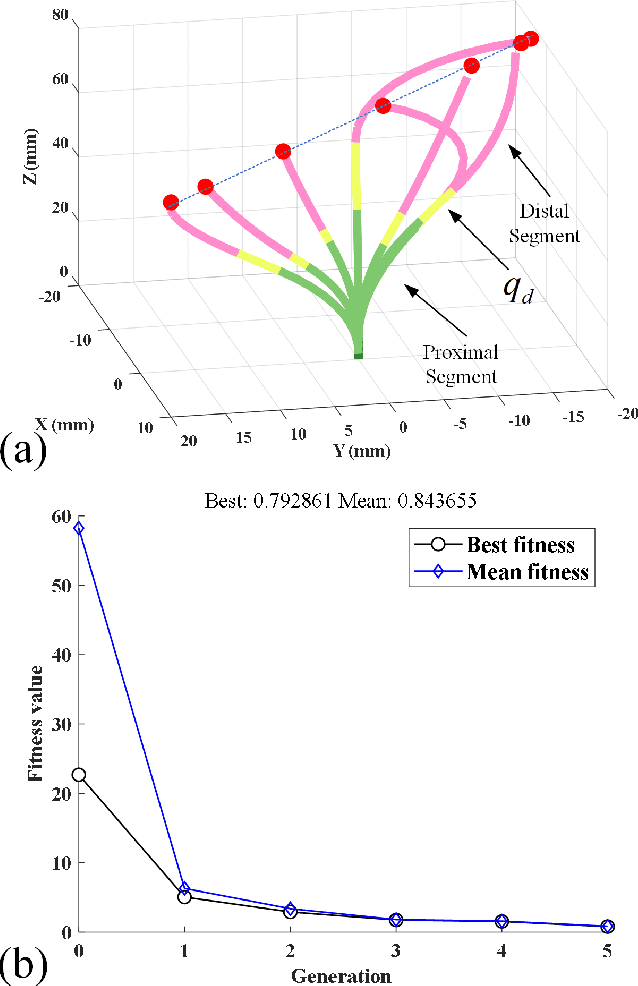
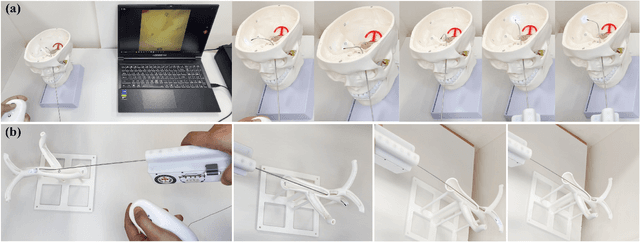
Feb 03, 2026Patients suffering chronic severe pulmonary thromboembolism need Pulmonary Thromboendarterectomy (PTE) to remove the thromb and intima located inside pulmonary artery (PA). During the surgery, a surgeon holds tweezers and a dissector to delicately strip the blockage, but available tools for this surgery are rigid and straight, lacking distal dexterity to access into thin branches of PA. Therefore, this work presents a novel robotized dissector based on concentric push/pull robot (CPPR) structure, enabling entering deep thin branch of tortuous PA. Compared with conventional rigid dissectors, our design characterizes slenderness and dual-segment-bending dexterity. Owing to the hollow and thin-walled structure of the CPPR-based dissector as it has a slender body of 3.5mm in diameter, the central lumen accommodates two channels for irrigation and tip tool, and space for endoscopic camera's signal wire. To provide accurate surgical manipulation, optimization-based kinematics model was established, realizing a 2mm accuracy in positioning the tip tool (60mm length) under open-loop control strategy. As such, with the endoscopic camera, traditional PTE is possible to be upgraded as endoscopic PTE. Basic physic performance of the robotized dissector including stiffness, motion accuracy and maneuverability was evaluated through experiments. Surgery simulation on ex vivo porcine lung also demonstrates its dexterity and notable advantages in PTE.
Ultra-slender Coaxial Antagonistic Tubular Robot for Ambidextrous Manipulation
Dec 25, 2024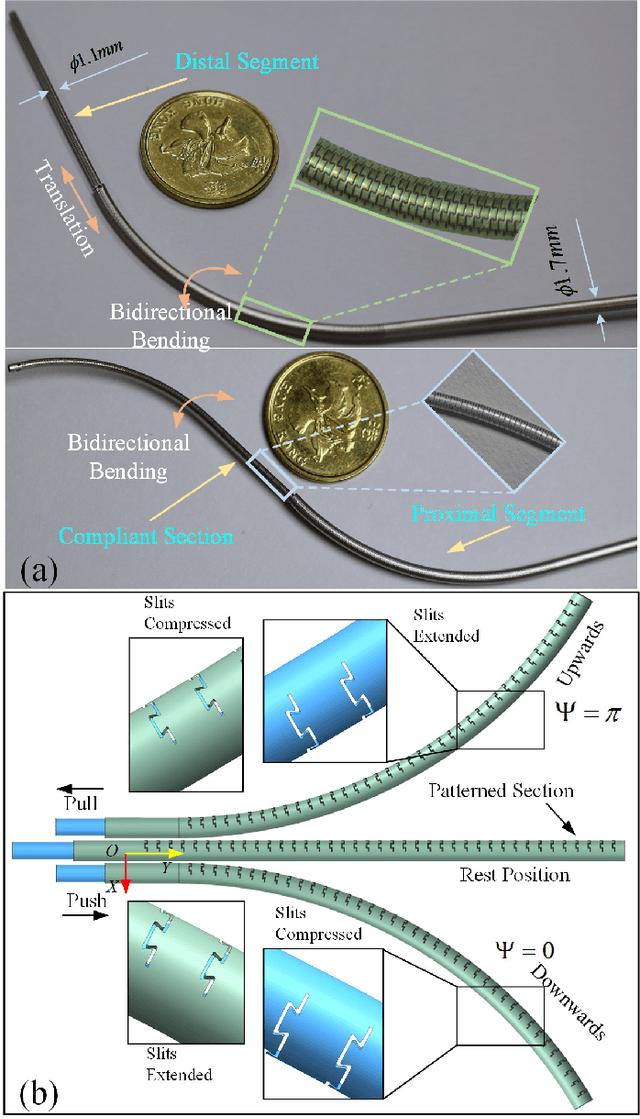

As soft continuum manipulators characterize terrific compliance and maneuverability in narrow unstructured space, low stiffness and limited dexterity are two obvious shortcomings in practical applications. To address the issues, a novel asymmetric coaxial antagonistic tubular robot (CATR) arm with high stiffness has been proposed, where two asymmetrically patterned metal tubes were fixed at the tip end with a shift angle of 180{\deg} and axial actuation force at the other end deforms the tube. Delicately designed and optimized steerable section and fully compliant section enable the soft manipulator high dexterity and stiffness. The basic kinetostatics model of a single segment was established on the basis of geometric and statics, and constrained optimization algorithm promotes finding the actuation inputs for a given desired task configuration. In addition, we have specifically built the design theory for the slits patterned on the tube surface, taking both bending angle and stiffness into account. Experiments demonstrate that the proposed robot arm is dexterous and has greater stiffness compared with same-size continuum robots. Furthermore, experiments also showcase the potential in minimally invasive surgery.
SurgTrack: CAD-Free 3D Tracking of Real-world Surgical Instruments
Sep 04, 2024



Vision-based surgical navigation has received increasing attention due to its non-invasive, cost-effective, and flexible advantages. In particular, a critical element of the vision-based navigation system is tracking surgical instruments. Compared with 2D instrument tracking methods, 3D instrument tracking has broader value in clinical practice, but is also more challenging due to weak texture, occlusion, and lack of Computer-Aided Design (CAD) models for 3D registration. To solve these challenges, we propose the SurgTrack, a two-stage 3D instrument tracking method for CAD-free and robust real-world applications. In the first registration stage, we incorporate an Instrument Signed Distance Field (SDF) modeling the 3D representation of instruments, achieving CAD-freed 3D registration. Due to this, we can obtain the location and orientation of instruments in the 3D space by matching the video stream with the registered SDF model. In the second tracking stage, we devise a posture graph optimization module, leveraging the historical tracking results of the posture memory pool to optimize the tracking results and improve the occlusion robustness. Furthermore, we collect the Instrument3D dataset to comprehensively evaluate the 3D tracking of surgical instruments. The extensive experiments validate the superiority and scalability of our SurgTrack, by outperforming the state-of-the-arts with a remarkable improvement. The code and dataset are available at https://github.com/wenwucode/SurgTrack.
Design and Visual Servoing Control of a Hybrid Dual-Segment Flexible Neurosurgical Robot for Intraventricular Biopsy
Feb 23, 2024



Traditional rigid endoscopes have challenges in flexibly treating tumors located deep in the brain, and low operability and fixed viewing angles limit its development. This study introduces a novel dual-segment flexible robotic endoscope MicroNeuro, designed to perform biopsies with dexterous surgical manipulation deep in the brain. Taking into account the uncertainty of the control model, an image-based visual servoing with online robot Jacobian estimation has been implemented to enhance motion accuracy. Furthermore, the application of model predictive control with constraints significantly bolsters the flexible robot's ability to adaptively track mobile objects and resist external interference. Experimental results underscore that the proposed control system enhances motion stability and precision. Phantom testing substantiates its considerable potential for deployment in neurosurgery.
Constrained Motion Planning of A Cable-Driven Soft Robot With Compressible Curvature Modeling
Jun 15, 2021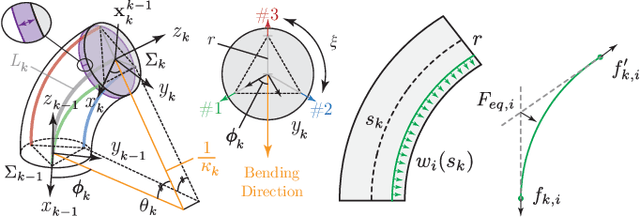


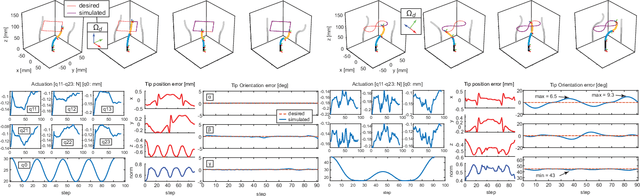
A cable-driven soft-bodied robot with redundancy can conduct the trajectory tracking task and in the meanwhile fulfill some extra constraints, such as tracking through an end-effector in designated orientation, or get rid of the evitable manipulator-obstacle collision. Those constraints require rational planning of the robot motion. In this work, we derived the compressible curvature kinematics of a cable-driven soft robot which takes the compressible soft segment into account. The motion planning of the soft robot for a trajectory tracking task in constrained conditions, including fixed orientation end-effector and manipulator-obstacle collision avoidance, has been investigated. The inverse solution of cable actuation was formulated as a damped least-square optimization problem and iteratively computed off-line. The performance of trajectory tracking and the obedience to constraints were evaluated via the simulation we made open-source, as well as the prototype experiments. The method can be generalized to the similar multisegment cable-driven soft robotic systems by customizing the robot parameters for the prior motion planning of the manipulator.