 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoLanG: Geometry-Aware Language-Guided Grasping with Unified RGB-D Multimodal Learning
Feb 04, 2026Language-guided grasping has emerged as a promising paradigm for enabling robots to identify and manipulate target objects through natural language instructions, yet it remains highly challenging in cluttered or occluded scenes. Existing methods often rely on multi-stage pipelines that separate object perception and grasping, which leads to limited cross-modal fusion, redundant computation, and poor generalization in cluttered, occluded, or low-texture scenes. To address these limitations, we propose GeoLanG, an end-to-end multi-task framework built upon the CLIP architecture that unifies visual and linguistic inputs into a shared representation space for robust semantic alignment and improved generalization. To enhance target discrimination under occlusion and low-texture conditions, we explore a more effective use of depth information through the Depth-guided Geometric Module (DGGM), which converts depth into explicit geometric priors and injects them into the attention mechanism without additional computational overhead. In addition, we propose Adaptive Dense Channel Integration, which adaptively balances the contributions of multi-layer features to produce more discriminative and generalizable visual representations. Extensive experiments on the OCID-VLG dataset, as well as in both simulation and real-world hardware, demonstrate that GeoLanG enables precise and robust language-guided grasping in complex, cluttered environments, paving the way toward more reliable multimodal robotic manipulation in real-world human-centric settings.
Three-dimensional Morphological Reconstruction of Millimeter-Scale Soft Continuum Robots based on Dual-Stereo-Vision
Aug 06, 2024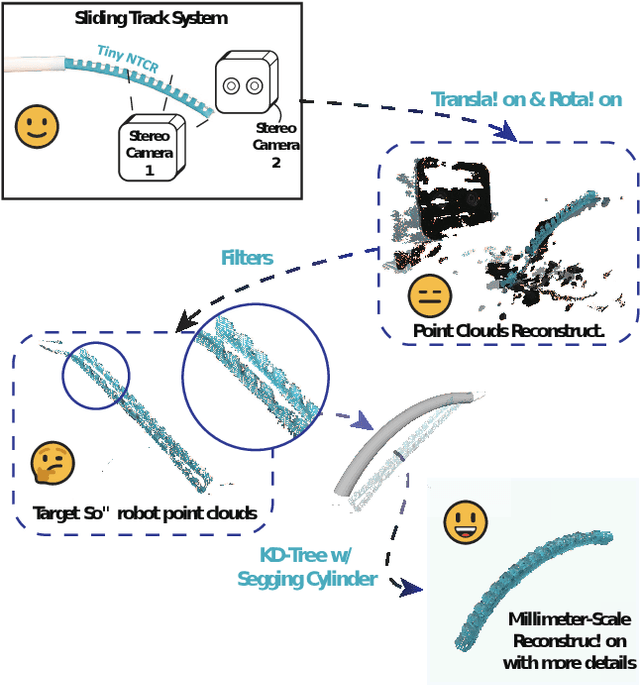
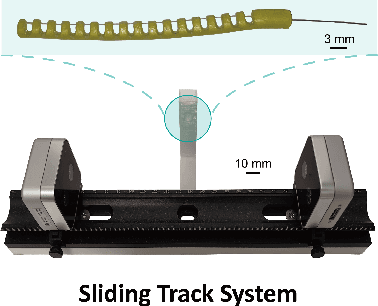
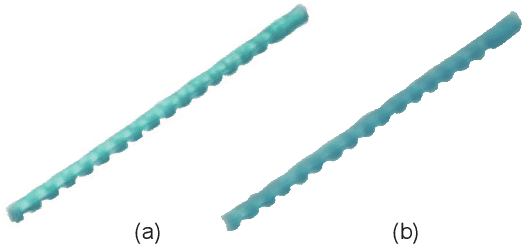
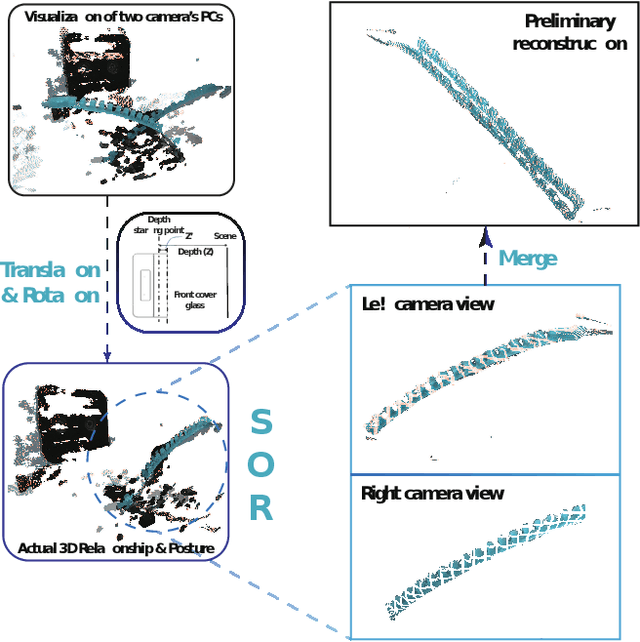
Continuum robots can be miniaturized to just a few millimeters in diameter. Among these, notched tubular continuum robots (NTCR) show great potential in many delicate applications. Existing works in robotic modeling focus on kinematics and dynamics but still face challenges in reproducing the robot's morphology -- a significant factor that can expand the research landscape of continuum robots, especially for those with asymmetric continuum structures. This paper proposes a dual stereo vision-based method for the three-dimensional morphological reconstruction of millimeter-scale NTCRs. The method employs two oppositely located stationary binocular cameras to capture the point cloud of the NTCR, then utilizes predefined geometry as a reference for the KD tree method to relocate the capture point clouds, resulting in a morphologically correct NTCR despite the low-quality raw point cloud collection. The method has been proved feasible for an NTCR with a 3.5 mm diameter, capturing 14 out of 16 notch features, with the measurements generally centered around the standard of 1.5 mm, demonstrating the capability of revealing morphological details. Our proposed method paves the way for 3D morphological reconstruction of millimeter-scale soft robots for further self-modeling study.
Sim-to-Real Segmentation in Robot-assisted Transoral Tracheal Intubation
May 19, 2023Robotic-assisted tracheal intubation requires the robot to distinguish anatomical features like an experienced physician using deep-learning techniques. However, real datasets of oropharyngeal organs are limited due to patient privacy issues, making it challenging to train deep-learning models for accurate image segmentation. We hereby consider generating a new data modality through a virtual environment to assist the training process. Specifically, this work introduces a virtual dataset generated by the Simulation Open Framework Architecture (SOFA) framework to overcome the limited availability of actual endoscopic images. We also propose a domain adaptive Sim-to-Real method for oropharyngeal organ image segmentation, which employs an image blending strategy called IoU-Ranking Blend (IRB) and style-transfer techniques to address discrepancies between datasets. Experimental results demonstrate the superior performance of the proposed approach with domain adaptive models, improving segmentation accuracy and training stability. In the practical application, the trained segmentation model holds great promise for robot-assisted intubation surgery and intelligent surgical navigation.
Domain Adaptive Sim-to-Real Segmentation of Oropharyngeal Organs
May 18, 2023Video-assisted transoral tracheal intubation (TI) necessitates using an endoscope that helps the physician insert a tracheal tube into the glottis instead of the esophagus. The growing trend of robotic-assisted TI would require a medical robot to distinguish anatomical features like an experienced physician which can be imitated by utilizing supervised deep-learning techniques. However, the real datasets of oropharyngeal organs are often inaccessible due to limited open-source data and patient privacy. In this work, we propose a domain adaptive Sim-to-Real framework called IoU-Ranking Blend-ArtFlow (IRB-AF) for image segmentation of oropharyngeal organs. The framework includes an image blending strategy called IoU-Ranking Blend (IRB) and style-transfer method ArtFlow. Here, IRB alleviates the problem of poor segmentation performance caused by significant datasets domain differences; while ArtFlow is introduced to reduce the discrepancies between datasets further. A virtual oropharynx image dataset generated by the SOFA framework is used as the learning subject for semantic segmentation to deal with the limited availability of actual endoscopic images. We adapted IRB-AF with the state-of-the-art domain adaptive segmentation models. The results demonstrate the superior performance of our approach in further improving the segmentation accuracy and training stability.
Constrained Motion Planning of A Cable-Driven Soft Robot With Compressible Curvature Modeling
Jun 15, 2021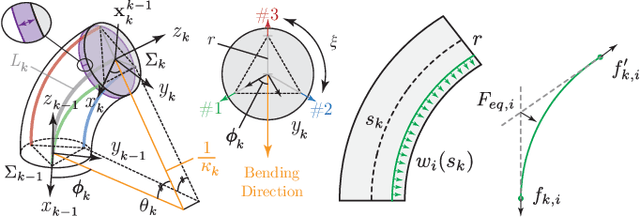


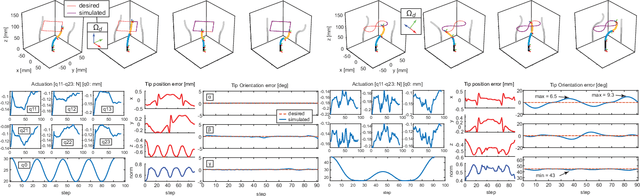
A cable-driven soft-bodied robot with redundancy can conduct the trajectory tracking task and in the meanwhile fulfill some extra constraints, such as tracking through an end-effector in designated orientation, or get rid of the evitable manipulator-obstacle collision. Those constraints require rational planning of the robot motion. In this work, we derived the compressible curvature kinematics of a cable-driven soft robot which takes the compressible soft segment into account. The motion planning of the soft robot for a trajectory tracking task in constrained conditions, including fixed orientation end-effector and manipulator-obstacle collision avoidance, has been investigated. The inverse solution of cable actuation was formulated as a damped least-square optimization problem and iteratively computed off-line. The performance of trajectory tracking and the obedience to constraints were evaluated via the simulation we made open-source, as well as the prototype experiments. The method can be generalized to the similar multisegment cable-driven soft robotic systems by customizing the robot parameters for the prior motion planning of the manipulator.