 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Grasping with Soft Aerial Vehicle Using Disturbance Observer-Based Model Predictive Control
Sep 21, 2024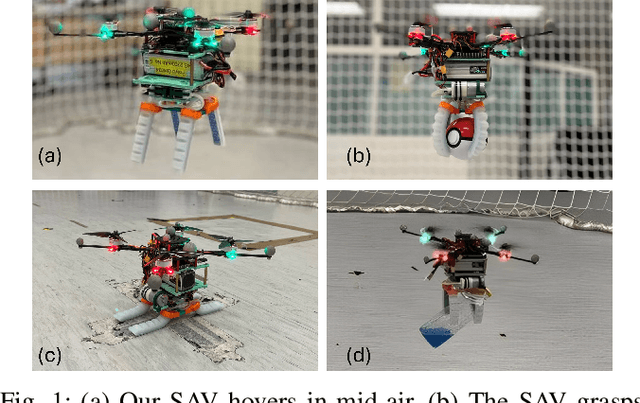
Aerial grasping, particularly soft aerial grasping, holds significant promise for drone delivery and harvesting tasks. However, controlling UAV dynamics during aerial grasping presents considerable challenges. The increased mass during payload grasping adversely affects thrust prediction, while unpredictable environmental disturbances further complicate control efforts. In this study, our objective aims to enhance the control of the Soft Aerial Vehicle (SAV) during aerial grasping by incorporating a disturbance observer into a Nonlinear Model Predictive Control (NMPC) SAV controller. By integrating the disturbance observer into the NMPC SAV controller, we aim to compensate for dynamic model idealization and uncertainties arising from additional payloads and unpredictable disturbances. Our approach combines a disturbance observer-based NMPC with the SAV controller, effectively minimizing tracking errors and enabling precise aerial grasping along all three axes. The proposed SAV equipped with Disturbance Observer-based Nonlinear Model Predictive Control (DOMPC) demonstrates remarkable capabilities in handling both static and non-static payloads, leading to the successful grasping of various objects. Notably, our SAV achieves an impressive payload-to-weight ratio, surpassing previous investigations in the domain of soft grasping. Using the proposed soft aerial vehicle weighing 1.002 kg, we achieve a maximum payload of 337 g by grasping.
A Modular Pneumatic Soft Gripper Design for Aerial Grasping and Landing
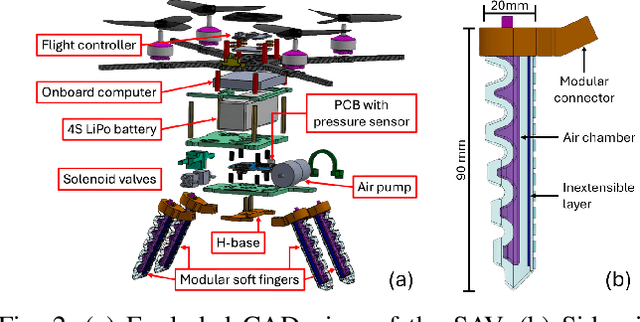
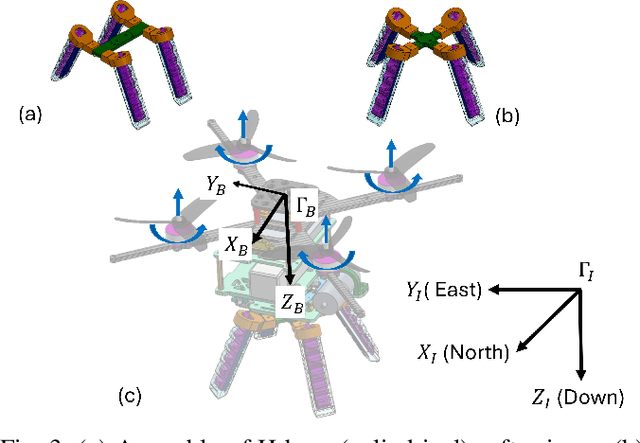
Nov 01, 2023Aerial robots have garnered significant attention due to their potential applications in various industries, such as inspection, search and rescue, and drone delivery. However, the ability of these robots to effectively grasp and land on objects or surfaces is often crucial for the successful completion of missions. This paper presents a novel modular soft gripper design tailored explicitly for aerial grasping and landing operations. The proposed modular pneumatic soft gripper incorporates a feed-forward proportional controller to regulate pressure, enabling compliant gripping capabilities. The modular connectors of the soft fingers offer two configurations of the 4-finger soft gripper, H-base and X-base, allowing adaptability to different target objects. Furthermore, when deflated, the gripper can function as a soft landing gear, reducing the weight and complexity of aerial manipulation control and enhancing flight efficiency. We demonstrate the efficacy of indoor aerial grasping and achieve a maximum payload of 217 g for the proposed soft aerial vehicle (SAV), with the weight of the soft drone being 808 g.
Constrained Motion Planning of A Cable-Driven Soft Robot With Compressible Curvature Modeling
Jun 15, 2021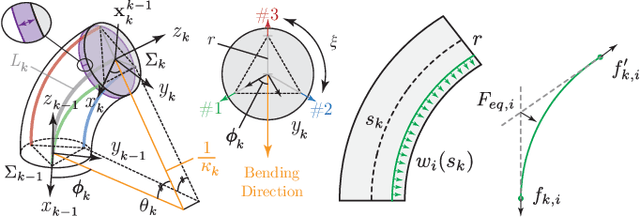


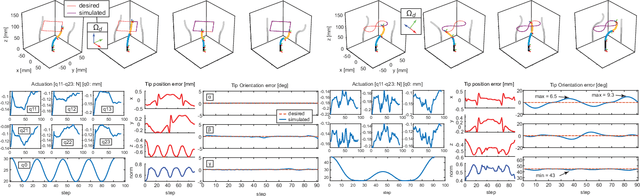
A cable-driven soft-bodied robot with redundancy can conduct the trajectory tracking task and in the meanwhile fulfill some extra constraints, such as tracking through an end-effector in designated orientation, or get rid of the evitable manipulator-obstacle collision. Those constraints require rational planning of the robot motion. In this work, we derived the compressible curvature kinematics of a cable-driven soft robot which takes the compressible soft segment into account. The motion planning of the soft robot for a trajectory tracking task in constrained conditions, including fixed orientation end-effector and manipulator-obstacle collision avoidance, has been investigated. The inverse solution of cable actuation was formulated as a damped least-square optimization problem and iteratively computed off-line. The performance of trajectory tracking and the obedience to constraints were evaluated via the simulation we made open-source, as well as the prototype experiments. The method can be generalized to the similar multisegment cable-driven soft robotic systems by customizing the robot parameters for the prior motion planning of the manipulator.
A Learning-Driven Framework with Spatial Optimization For Surgical Suture Thread Reconstruction and Autonomous Grasping Under Multiple Topologies and Environmental Noises
Jul 02, 2020Surgical knot tying is one of the most fundamental and important procedures in surgery, and a high-quality knot can significantly benefit the postoperative recovery of the patient. However, a longtime operation may easily cause fatigue to surgeons, especially during the tedious wound closure task. In this paper, we present a vision-based method to automate the suture thread grasping, which is a sub-task in surgical knot tying and an intermediate step between the stitching and looping manipulations. To achieve this goal, the acquisition of a suture's three-dimensional (3D) information is critical. Towards this objective, we adopt a transfer-learning strategy first to fine-tune a pre-trained model by learning the information from large legacy surgical data and images obtained by the on-site equipment. Thus, a robust suture segmentation can be achieved regardless of inherent environment noises. We further leverage a searching strategy with termination policies for a suture's sequence inference based on the analysis of multiple topologies. Exact results of the pixel-level sequence along a suture can be obtained, and they can be further applied for a 3D shape reconstruction using our optimized shortest path approach. The grasping point considering the suturing criterion can be ultimately acquired. Experiments regarding the suture 2D segmentation and ordering sequence inference under environmental noises were extensively evaluated. Results related to the automated grasping operation were demonstrated by simulations in V-REP and by robot experiments using Universal Robot (UR) together with the da Vinci Research Kit (dVRK) adopting our learning-driven framework.