 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePalpAid: Multimodal Pneumatic Tactile Sensor for Tissue Palpation
Dec 22, 2025The tactile properties of tissue, such as elasticity and stiffness, often play an important role in surgical oncology when identifying tumors and pathological tissue boundaries. Though extremely valuable, robot-assisted surgery comes at the cost of reduced sensory information to the surgeon; typically, only vision is available. Sensors proposed to overcome this sensory desert are often bulky, complex, and incompatible with the surgical workflow. We present PalpAid, a multimodal pneumatic tactile sensor equipped with a microphone and pressure sensor, converting contact force into an internal pressure differential. The pressure sensor acts as an event detector, while the auditory signature captured by the microphone assists in tissue delineation. We show the design, fabrication, and assembly of sensory units with characterization tests to show robustness to use, inflation-deflation cycles, and integration with a robotic system. Finally, we show the sensor's ability to classify 3D-printed hard objects with varying infills and soft ex vivo tissues. Overall, PalpAid aims to fill the sensory gap intelligently and allow improved clinical decision-making.
Aerial Grasping with Soft Aerial Vehicle Using Disturbance Observer-Based Model Predictive Control
Sep 21, 2024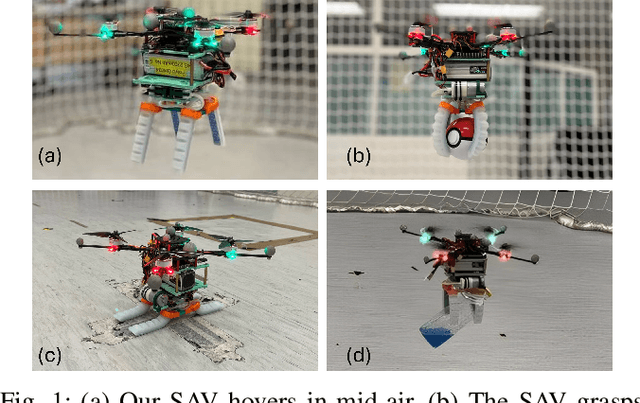
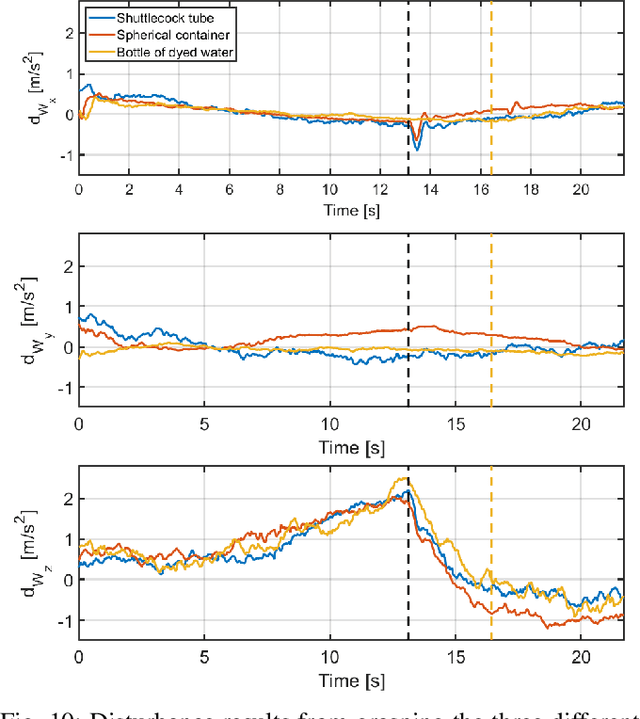
Aerial grasping, particularly soft aerial grasping, holds significant promise for drone delivery and harvesting tasks. However, controlling UAV dynamics during aerial grasping presents considerable challenges. The increased mass during payload grasping adversely affects thrust prediction, while unpredictable environmental disturbances further complicate control efforts. In this study, our objective aims to enhance the control of the Soft Aerial Vehicle (SAV) during aerial grasping by incorporating a disturbance observer into a Nonlinear Model Predictive Control (NMPC) SAV controller. By integrating the disturbance observer into the NMPC SAV controller, we aim to compensate for dynamic model idealization and uncertainties arising from additional payloads and unpredictable disturbances. Our approach combines a disturbance observer-based NMPC with the SAV controller, effectively minimizing tracking errors and enabling precise aerial grasping along all three axes. The proposed SAV equipped with Disturbance Observer-based Nonlinear Model Predictive Control (DOMPC) demonstrates remarkable capabilities in handling both static and non-static payloads, leading to the successful grasping of various objects. Notably, our SAV achieves an impressive payload-to-weight ratio, surpassing previous investigations in the domain of soft grasping. Using the proposed soft aerial vehicle weighing 1.002 kg, we achieve a maximum payload of 337 g by grasping.
A Modular Pneumatic Soft Gripper Design for Aerial Grasping and Landing
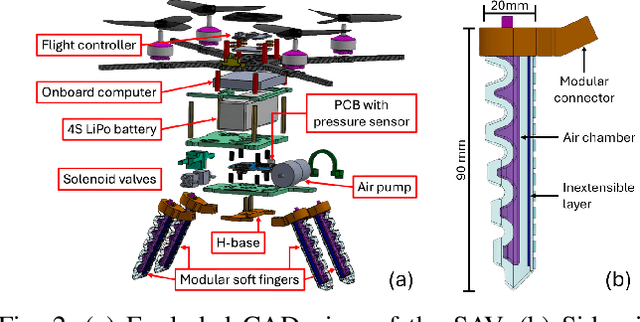
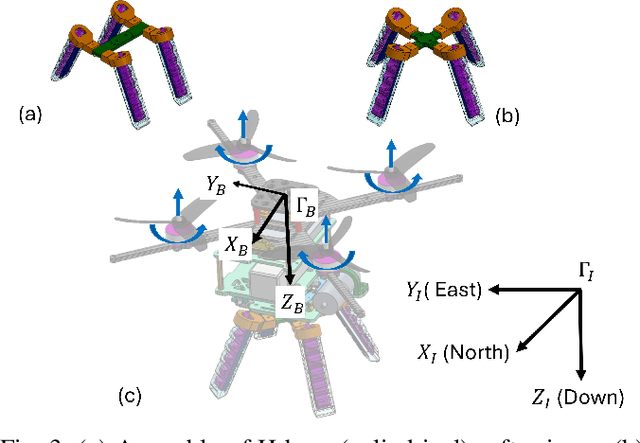
Nov 01, 2023Aerial robots have garnered significant attention due to their potential applications in various industries, such as inspection, search and rescue, and drone delivery. However, the ability of these robots to effectively grasp and land on objects or surfaces is often crucial for the successful completion of missions. This paper presents a novel modular soft gripper design tailored explicitly for aerial grasping and landing operations. The proposed modular pneumatic soft gripper incorporates a feed-forward proportional controller to regulate pressure, enabling compliant gripping capabilities. The modular connectors of the soft fingers offer two configurations of the 4-finger soft gripper, H-base and X-base, allowing adaptability to different target objects. Furthermore, when deflated, the gripper can function as a soft landing gear, reducing the weight and complexity of aerial manipulation control and enhancing flight efficiency. We demonstrate the efficacy of indoor aerial grasping and achieve a maximum payload of 217 g for the proposed soft aerial vehicle (SAV), with the weight of the soft drone being 808 g.