 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThree-dimensional Morphological Reconstruction of Millimeter-Scale Soft Continuum Robots based on Dual-Stereo-Vision
Paper and Code
Aug 06, 2024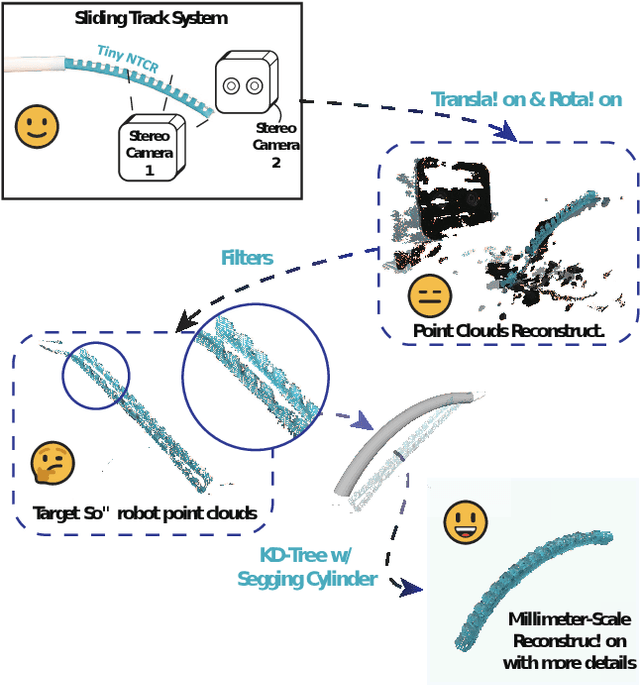
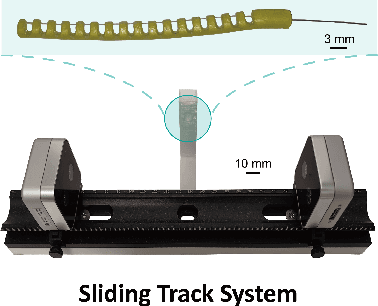
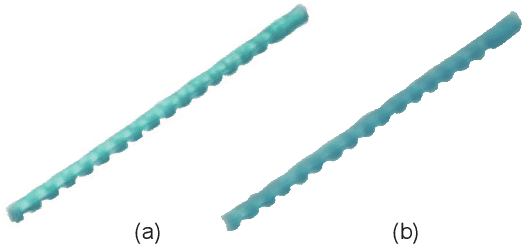
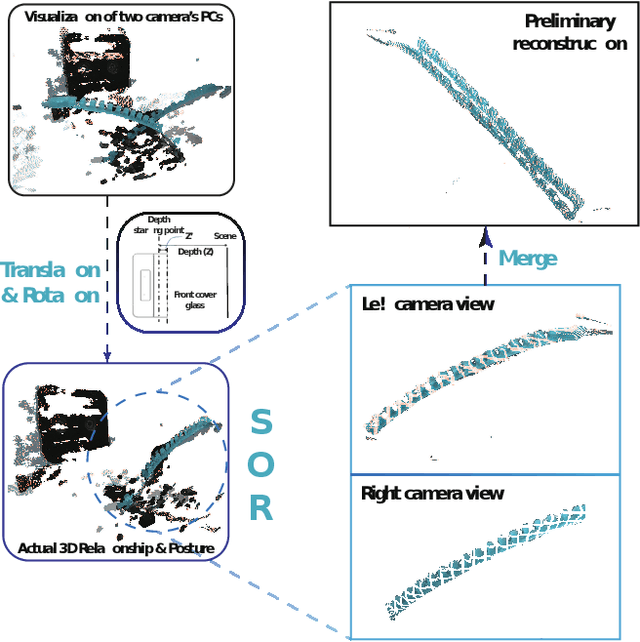
Continuum robots can be miniaturized to just a few millimeters in diameter. Among these, notched tubular continuum robots (NTCR) show great potential in many delicate applications. Existing works in robotic modeling focus on kinematics and dynamics but still face challenges in reproducing the robot's morphology -- a significant factor that can expand the research landscape of continuum robots, especially for those with asymmetric continuum structures. This paper proposes a dual stereo vision-based method for the three-dimensional morphological reconstruction of millimeter-scale NTCRs. The method employs two oppositely located stationary binocular cameras to capture the point cloud of the NTCR, then utilizes predefined geometry as a reference for the KD tree method to relocate the capture point clouds, resulting in a morphologically correct NTCR despite the low-quality raw point cloud collection. The method has been proved feasible for an NTCR with a 3.5 mm diameter, capturing 14 out of 16 notch features, with the measurements generally centered around the standard of 1.5 mm, demonstrating the capability of revealing morphological details. Our proposed method paves the way for 3D morphological reconstruction of millimeter-scale soft robots for further self-modeling study.