 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUSPilot: An Embodied Robotic Assistant Ultrasound System with Large Language Model Enhanced Graph Planner
Feb 18, 2025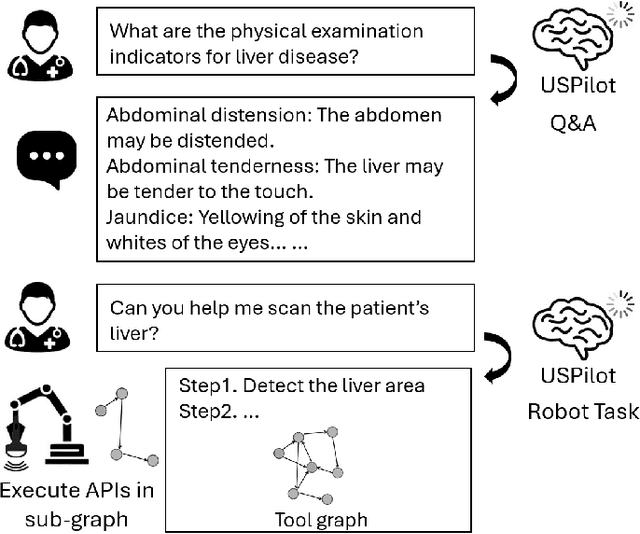
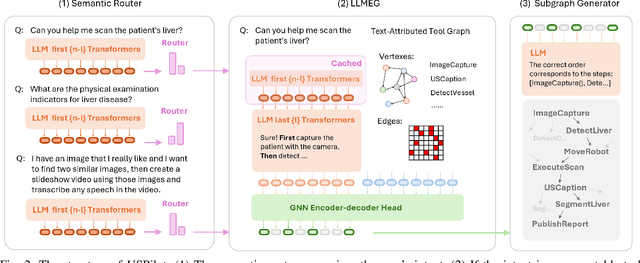

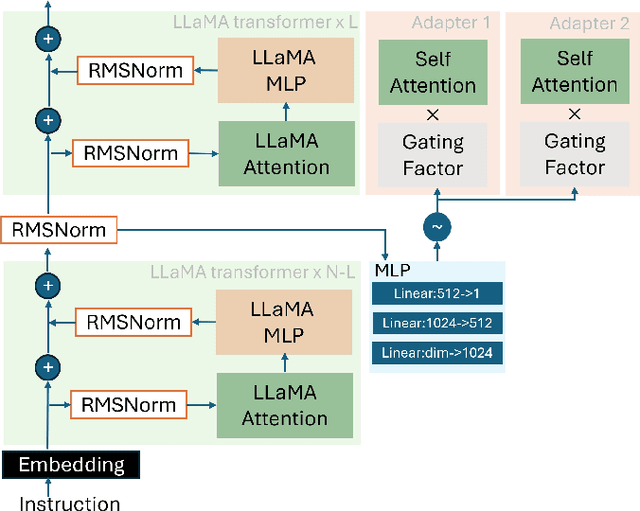
In the era of Large Language Models (LLMs), embodied artificial intelligence presents transformative opportunities for robotic manipulation tasks. Ultrasound imaging, a widely used and cost-effective medical diagnostic procedure, faces challenges due to the global shortage of professional sonographers. To address this issue, we propose USPilot, an embodied robotic assistant ultrasound system powered by an LLM-based framework to enable autonomous ultrasound acquisition. USPilot is designed to function as a virtual sonographer, capable of responding to patients' ultrasound-related queries and performing ultrasound scans based on user intent. By fine-tuning the LLM, USPilot demonstrates a deep understanding of ultrasound-specific questions and tasks. Furthermore, USPilot incorporates an LLM-enhanced Graph Neural Network (GNN) to manage ultrasound robotic APIs and serve as a task planner. Experimental results show that the LLM-enhanced GNN achieves unprecedented accuracy in task planning on public datasets. Additionally, the system demonstrates significant potential in autonomously understanding and executing ultrasound procedures. These advancements bring us closer to achieving autonomous and potentially unmanned robotic ultrasound systems, addressing critical resource gaps in medical imaging.
Force Sensing Guided Artery-Vein Segmentation via Sequential Ultrasound Images
Jul 31, 2024Accurate identification of arteries and veins in ultrasound images is crucial for vascular examinations and interventions in robotics-assisted surgeries. However, current methods for ultrasound vessel segmentation face challenges in distinguishing between arteries and veins due to their morphological similarities. To address this challenge, this study introduces a novel force sensing guided segmentation approach to enhance artery-vein segmentation accuracy by leveraging their distinct deformability. Our proposed method utilizes force magnitude to identify key frames with the most significant vascular deformation in a sequence of ultrasound images. These key frames are then integrated with the current frame through attention mechanisms, with weights assigned in accordance with force magnitude. Our proposed force sensing guided framework can be seamlessly integrated into various segmentation networks and achieves significant performance improvements in multiple U-shaped networks such as U-Net, Swin-unet and Transunet. Furthermore, we contribute the first multimodal ultrasound artery-vein segmentation dataset, Mus-V, which encompasses both force and image data simultaneously. The dataset comprises 3114 ultrasound images of carotid and femoral vessels extracted from 105 videos, with corresponding force data recorded by the force sensor mounted on the US probe. Our code and dataset will be publicly available.
Design and Visual Servoing Control of a Hybrid Dual-Segment Flexible Neurosurgical Robot for Intraventricular Biopsy
Feb 23, 2024



Traditional rigid endoscopes have challenges in flexibly treating tumors located deep in the brain, and low operability and fixed viewing angles limit its development. This study introduces a novel dual-segment flexible robotic endoscope MicroNeuro, designed to perform biopsies with dexterous surgical manipulation deep in the brain. Taking into account the uncertainty of the control model, an image-based visual servoing with online robot Jacobian estimation has been implemented to enhance motion accuracy. Furthermore, the application of model predictive control with constraints significantly bolsters the flexible robot's ability to adaptively track mobile objects and resist external interference. Experimental results underscore that the proposed control system enhances motion stability and precision. Phantom testing substantiates its considerable potential for deployment in neurosurgery.
DaFoEs: Mixing Datasets towards the generalization of vision-state deep-learning Force Estimation in Minimally Invasive Robotic Surgery
Jan 17, 2024



Precisely determining the contact force during safe interaction in Minimally Invasive Robotic Surgery (MIRS) is still an open research challenge. Inspired by post-operative qualitative analysis from surgical videos, the use of cross-modality data driven deep neural network models has been one of the newest approaches to predict sensorless force trends. However, these methods required for large and variable datasets which are not currently available. In this paper, we present a new vision-haptic dataset (DaFoEs) with variable soft environments for the training of deep neural models. In order to reduce the bias from a single dataset, we present a pipeline to generalize different vision and state data inputs for mixed dataset training, using a previously validated dataset with different setup. Finally, we present a variable encoder-decoder architecture to predict the forces done by the laparoscopic tool using single input or sequence of inputs. For input sequence, we use a recurrent decoder, named with the prefix R, and a new temporal sampling to represent the acceleration of the tool. During our training, we demonstrate that single dataset training tends to overfit to the training data domain, but has difficulties on translating the results across new domains. However, dataset mixing presents a good translation with a mean relative estimated force error of 5% and 12% for the recurrent and non-recurrent models respectively. Our method, also marginally increase the effectiveness of transformers for force estimation up to a maximum of ~15%, as the volume of available data is increase by 150%. In conclusion, we demonstrate that mixing experimental set ups for vision-state force estimation in MIRS is a possible approach towards the general solution of the problem.