 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePADReg: Physics-Aware Deformable Registration Guided by Contact Force for Ultrasound Sequences
Aug 12, 2025Ultrasound deformable registration estimates spatial transformations between pairs of deformed ultrasound images, which is crucial for capturing biomechanical properties and enhancing diagnostic accuracy in diseases such as thyroid nodules and breast cancer. However, ultrasound deformable registration remains highly challenging, especially under large deformation. The inherently low contrast, heavy noise and ambiguous tissue boundaries in ultrasound images severely hinder reliable feature extraction and correspondence matching. Existing methods often suffer from poor anatomical alignment and lack physical interpretability. To address the problem, we propose PADReg, a physics-aware deformable registration framework guided by contact force. PADReg leverages synchronized contact force measured by robotic ultrasound systems as a physical prior to constrain the registration. Specifically, instead of directly predicting deformation fields, we first construct a pixel-wise stiffness map utilizing the multi-modal information from contact force and ultrasound images. The stiffness map is then combined with force data to estimate a dense deformation field, through a lightweight physics-aware module inspired by Hooke's law. This design enables PADReg to achieve physically plausible registration with better anatomical alignment than previous methods relying solely on image similarity. Experiments on in-vivo datasets demonstrate that it attains a HD95 of 12.90, which is 21.34\% better than state-of-the-art methods. The source code is available at https://github.com/evelynskip/PADReg.
USPilot: An Embodied Robotic Assistant Ultrasound System with Large Language Model Enhanced Graph Planner
Feb 18, 2025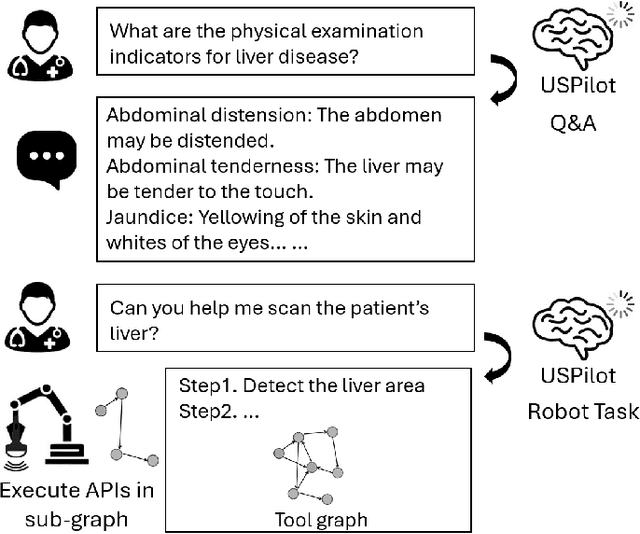
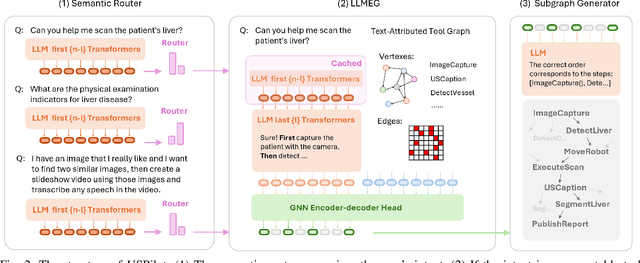

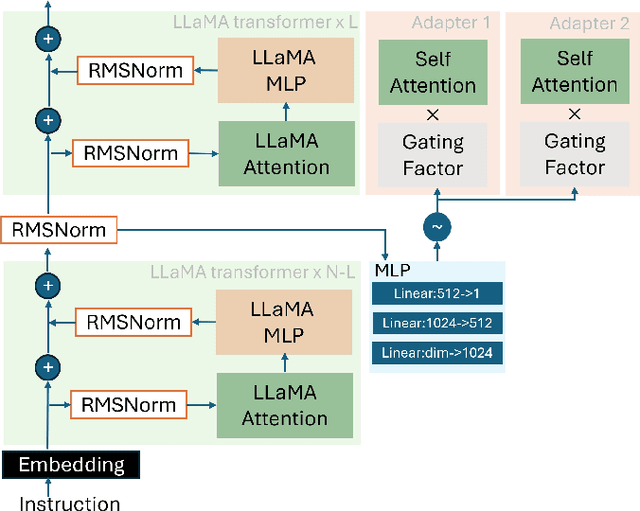
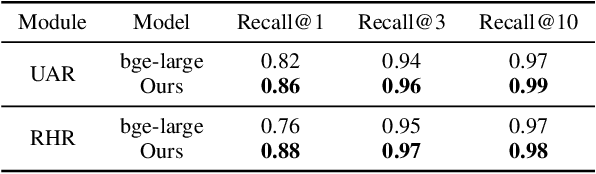
In the era of Large Language Models (LLMs), embodied artificial intelligence presents transformative opportunities for robotic manipulation tasks. Ultrasound imaging, a widely used and cost-effective medical diagnostic procedure, faces challenges due to the global shortage of professional sonographers. To address this issue, we propose USPilot, an embodied robotic assistant ultrasound system powered by an LLM-based framework to enable autonomous ultrasound acquisition. USPilot is designed to function as a virtual sonographer, capable of responding to patients' ultrasound-related queries and performing ultrasound scans based on user intent. By fine-tuning the LLM, USPilot demonstrates a deep understanding of ultrasound-specific questions and tasks. Furthermore, USPilot incorporates an LLM-enhanced Graph Neural Network (GNN) to manage ultrasound robotic APIs and serve as a task planner. Experimental results show that the LLM-enhanced GNN achieves unprecedented accuracy in task planning on public datasets. Additionally, the system demonstrates significant potential in autonomously understanding and executing ultrasound procedures. These advancements bring us closer to achieving autonomous and potentially unmanned robotic ultrasound systems, addressing critical resource gaps in medical imaging.
Force Sensing Guided Artery-Vein Segmentation via Sequential Ultrasound Images
Jul 31, 2024Accurate identification of arteries and veins in ultrasound images is crucial for vascular examinations and interventions in robotics-assisted surgeries. However, current methods for ultrasound vessel segmentation face challenges in distinguishing between arteries and veins due to their morphological similarities. To address this challenge, this study introduces a novel force sensing guided segmentation approach to enhance artery-vein segmentation accuracy by leveraging their distinct deformability. Our proposed method utilizes force magnitude to identify key frames with the most significant vascular deformation in a sequence of ultrasound images. These key frames are then integrated with the current frame through attention mechanisms, with weights assigned in accordance with force magnitude. Our proposed force sensing guided framework can be seamlessly integrated into various segmentation networks and achieves significant performance improvements in multiple U-shaped networks such as U-Net, Swin-unet and Transunet. Furthermore, we contribute the first multimodal ultrasound artery-vein segmentation dataset, Mus-V, which encompasses both force and image data simultaneously. The dataset comprises 3114 ultrasound images of carotid and femoral vessels extracted from 105 videos, with corresponding force data recorded by the force sensor mounted on the US probe. Our code and dataset will be publicly available.
Transforming Surgical Interventions with Embodied Intelligence for Ultrasound Robotics
Jun 18, 2024



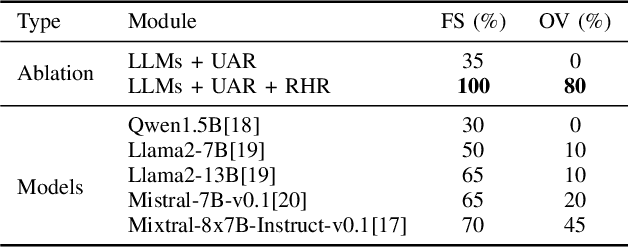
Ultrasonography has revolutionized non-invasive diagnostic methodologies, significantly enhancing patient outcomes across various medical domains. Despite its advancements, integrating ultrasound technology with robotic systems for automated scans presents challenges, including limited command understanding and dynamic execution capabilities. To address these challenges, this paper introduces a novel Ultrasound Embodied Intelligence system that synergistically combines ultrasound robots with large language models (LLMs) and domain-specific knowledge augmentation, enhancing ultrasound robots' intelligence and operational efficiency. Our approach employs a dual strategy: firstly, integrating LLMs with ultrasound robots to interpret doctors' verbal instructions into precise motion planning through a comprehensive understanding of ultrasound domain knowledge, including APIs and operational manuals; secondly, incorporating a dynamic execution mechanism, allowing for real-time adjustments to scanning plans based on patient movements or procedural errors. We demonstrate the effectiveness of our system through extensive experiments, including ablation studies and comparisons across various models, showcasing significant improvements in executing medical procedures from verbal commands. Our findings suggest that the proposed system improves the efficiency and quality of ultrasound scans and paves the way for further advancements in autonomous medical scanning technologies, with the potential to transform non-invasive diagnostics and streamline medical workflows.
Enhancing Surgical Robots with Embodied Intelligence for Autonomous Ultrasound Scanning
May 01, 2024
Ultrasound robots are increasingly used in medical diagnostics and early disease screening. However, current ultrasound robots lack the intelligence to understand human intentions and instructions, hindering autonomous ultrasound scanning. To solve this problem, we propose a novel Ultrasound Embodied Intelligence system that equips ultrasound robots with the large language model (LLM) and domain knowledge, thereby improving the efficiency of ultrasound robots. Specifically, we first design an ultrasound operation knowledge database to add expertise in ultrasound scanning to the LLM, enabling the LLM to perform precise motion planning. Furthermore, we devise a dynamic ultrasound scanning strategy based on a \textit{think-observe-execute} prompt engineering, allowing LLMs to dynamically adjust motion planning strategies during the scanning procedures. Extensive experiments demonstrate that our system significantly improves ultrasound scan efficiency and quality from verbal commands. This advancement in autonomous medical scanning technology contributes to non-invasive diagnostics and streamlined medical workflows.