 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltra-slender Coaxial Antagonistic Tubular Robot for Ambidextrous Manipulation
Dec 25, 2024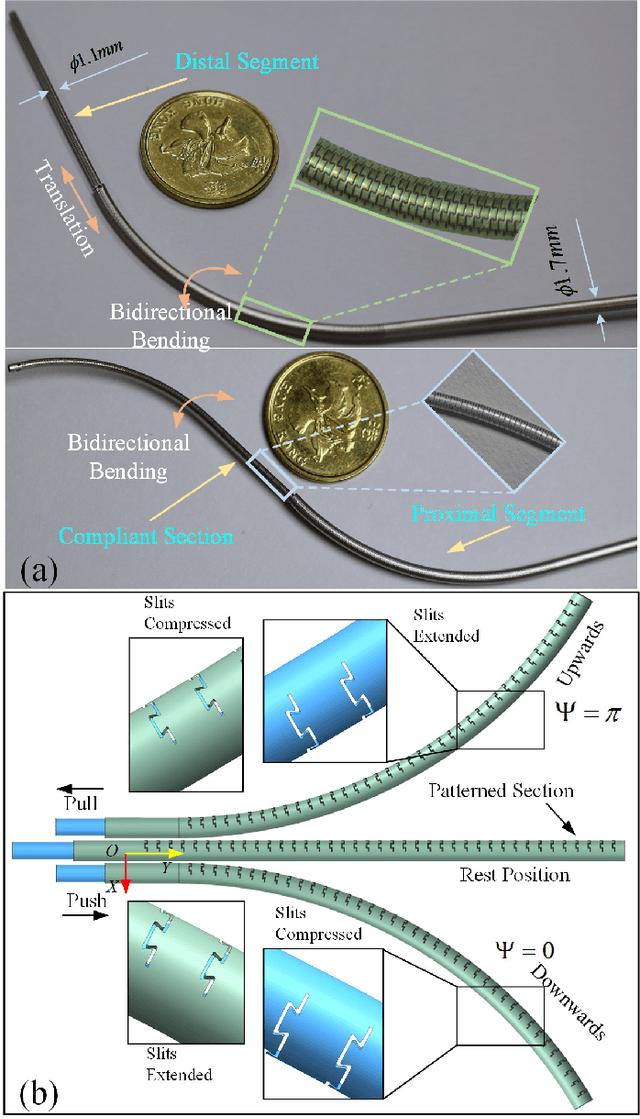

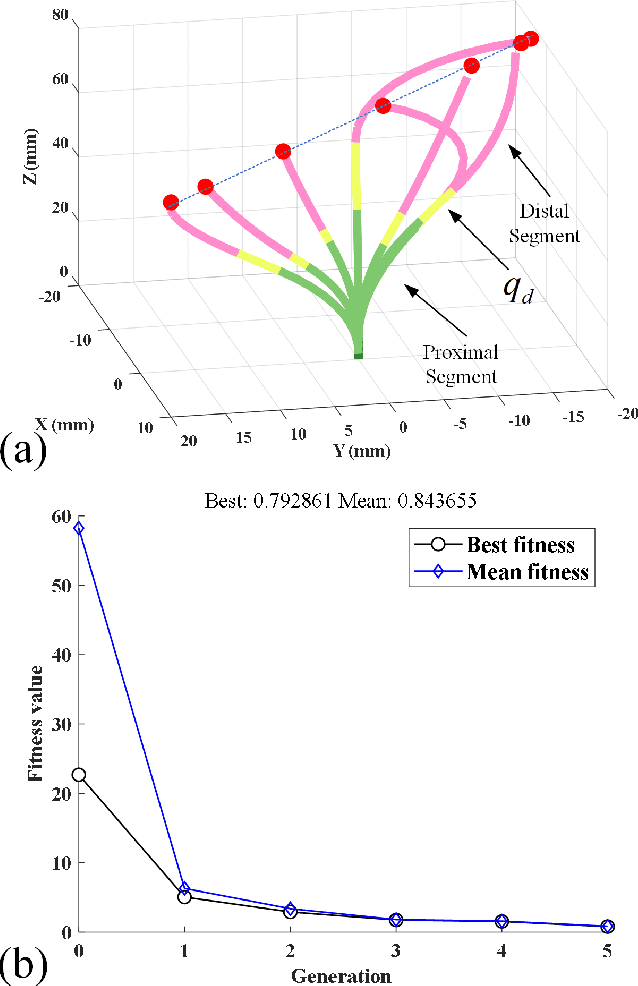
As soft continuum manipulators characterize terrific compliance and maneuverability in narrow unstructured space, low stiffness and limited dexterity are two obvious shortcomings in practical applications. To address the issues, a novel asymmetric coaxial antagonistic tubular robot (CATR) arm with high stiffness has been proposed, where two asymmetrically patterned metal tubes were fixed at the tip end with a shift angle of 180{\deg} and axial actuation force at the other end deforms the tube. Delicately designed and optimized steerable section and fully compliant section enable the soft manipulator high dexterity and stiffness. The basic kinetostatics model of a single segment was established on the basis of geometric and statics, and constrained optimization algorithm promotes finding the actuation inputs for a given desired task configuration. In addition, we have specifically built the design theory for the slits patterned on the tube surface, taking both bending angle and stiffness into account. Experiments demonstrate that the proposed robot arm is dexterous and has greater stiffness compared with same-size continuum robots. Furthermore, experiments also showcase the potential in minimally invasive surgery.
Robotic transcatheter tricuspid valve replacement with hybrid enhanced intelligence: a new paradigm and first-in-vivo study
Nov 19, 2024



Transcatheter tricuspid valve replacement (TTVR) is the latest treatment for tricuspid regurgitation and is in the early stages of clinical adoption. Intelligent robotic approaches are expected to overcome the challenges of surgical manipulation and widespread dissemination, but systems and protocols with high clinical utility have not yet been reported. In this study, we propose a complete solution that includes a passive stabilizer, robotic drive, detachable delivery catheter and valve manipulation mechanism. Working towards autonomy, a hybrid augmented intelligence approach based on reinforcement learning, Monte Carlo probabilistic maps and human-robot co-piloted control was introduced. Systematic tests in phantom and first-in-vivo animal experiments were performed to verify that the system design met the clinical requirement. Furthermore, the experimental results confirmed the advantages of co-piloted control over conventional master-slave control in terms of time efficiency, control efficiency, autonomy and stability of operation. In conclusion, this study provides a comprehensive pathway for robotic TTVR and, to our knowledge, completes the first animal study that not only successfully demonstrates the application of hybrid enhanced intelligence in interventional robotics, but also provides a solution with high application value for a cutting-edge procedure.
IoT-based Remote Control Study of a Robotic Trans-esophageal Ultrasound Probe via LAN and 5G
May 28, 2020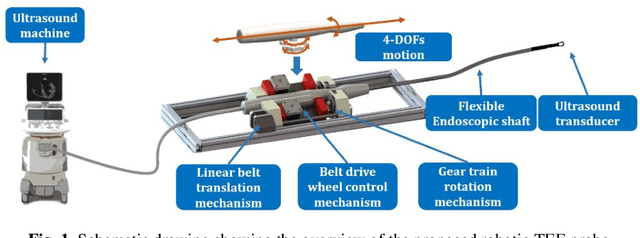
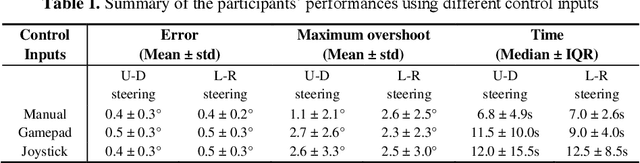
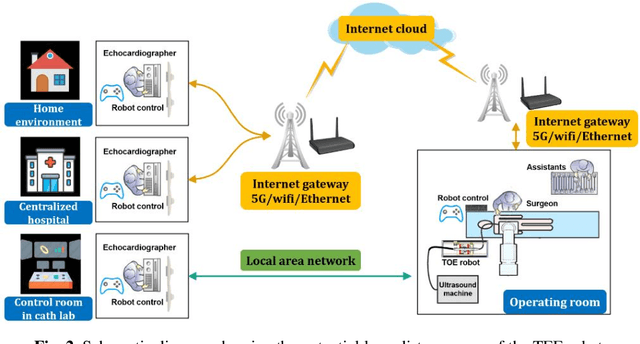
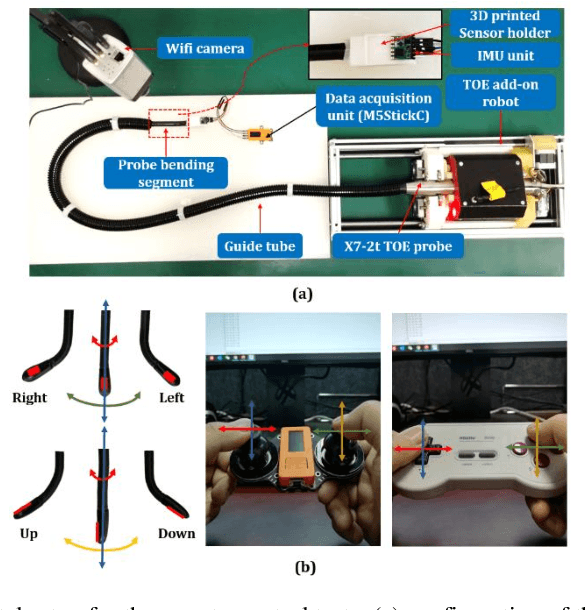
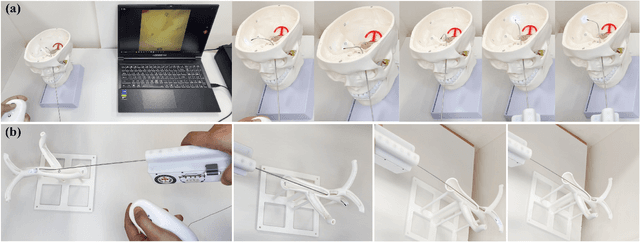
A robotic trans-esophageal echocardiography (TEE) probe has been recently developed to address the problems with manual control in the X-ray envi-ronment when a conventional probe is used for interventional procedure guidance. However, the robot was exclusively to be used in local areas and the effectiveness of remote control has not been scientifically tested. In this study, we implemented an Internet-of-things (IoT)-based configuration to the TEE robot so the system can set up a local area network (LAN) or be configured to connect to an internet cloud over 5G. To investigate the re-mote control, backlash hysteresis effects were measured and analysed. A joy-stick-based device and a button-based gamepad were then employed and compared with the manual control in a target reaching experiment for the two steering axes. The results indicated different hysteresis curves for the left-right and up-down steering axes with the input wheel's deadbands found to be 15 deg and deg, respectively. Similar magnitudes of positioning errors at approximately 0.5 deg and maximum overshoots at around 2.5 deg were found when manually and robotically controlling the TEE probe. The amount of time to finish the task indicated a better performance using the button-based gamepad over joystick-based device, although both were worse than the manual control. It is concluded that the IoT-based remote control of the TEE probe is feasible and a trained user can accurately manipulate the probe. The main identified problem was the backlash hysteresis in the steering axes, which can result in continuous oscillations and overshoots.