 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHGATSolver: A Heterogeneous Graph Attention Solver for Fluid-Structure Interaction
Jan 14, 2026Fluid-structure interaction (FSI) systems involve distinct physical domains, fluid and solid, governed by different partial differential equations and coupled at a dynamic interface. While learning-based solvers offer a promising alternative to costly numerical simulations, existing methods struggle to capture the heterogeneous dynamics of FSI within a unified framework. This challenge is further exacerbated by inconsistencies in response across domains due to interface coupling and by disparities in learning difficulty across fluid and solid regions, leading to instability during prediction. To address these challenges, we propose the Heterogeneous Graph Attention Solver (HGATSolver). HGATSolver encodes the system as a heterogeneous graph, embedding physical structure directly into the model via distinct node and edge types for fluid, solid, and interface regions. This enables specialized message-passing mechanisms tailored to each physical domain. To stabilize explicit time stepping, we introduce a novel physics-conditioned gating mechanism that serves as a learnable, adaptive relaxation factor. Furthermore, an Inter-domain Gradient-Balancing Loss dynamically balances the optimization objectives across domains based on predictive uncertainty. Extensive experiments on two constructed FSI benchmarks and a public dataset demonstrate that HGATSolver achieves state-of-the-art performance, establishing an effective framework for surrogate modeling of coupled multi-physics systems.
Dual-Mode Magnetic Continuum Robot for Targeted Drug Delivery
Oct 02, 2025


Magnetic continuum robots (MCRs) enable minimally invasive navigation through tortuous anatomical channels, yet axially magnetized designs have largely been limited to bending-only motion. To expand deformation capabilities, this paper presents a simple assembly that embeds permanent magnets radially within the catheter wall, allowing a single externally steered permanent magnet to independently induce either bending or torsion. A physics-based formulation together with finite-element analysis establishes the actuation principles, and benchtop experiments validate decoupled mode control under practical fields. Building on this, a dual-layer blockage mechanism consisting of outer grooves and inner plates leverages torsional shear to achieve on-demand drug release. Finally, an in-phantom intervention experiment demonstrates end-to-end operation: lumen following by bending for target approach, followed by twist-activated release at the site. The resulting compact, cable-free platform combines versatile deformation with precise payload delivery, indicating strong potential for next-generation, site-specific therapies.
Robotic transcatheter tricuspid valve replacement with hybrid enhanced intelligence: a new paradigm and first-in-vivo study
Nov 19, 2024



Transcatheter tricuspid valve replacement (TTVR) is the latest treatment for tricuspid regurgitation and is in the early stages of clinical adoption. Intelligent robotic approaches are expected to overcome the challenges of surgical manipulation and widespread dissemination, but systems and protocols with high clinical utility have not yet been reported. In this study, we propose a complete solution that includes a passive stabilizer, robotic drive, detachable delivery catheter and valve manipulation mechanism. Working towards autonomy, a hybrid augmented intelligence approach based on reinforcement learning, Monte Carlo probabilistic maps and human-robot co-piloted control was introduced. Systematic tests in phantom and first-in-vivo animal experiments were performed to verify that the system design met the clinical requirement. Furthermore, the experimental results confirmed the advantages of co-piloted control over conventional master-slave control in terms of time efficiency, control efficiency, autonomy and stability of operation. In conclusion, this study provides a comprehensive pathway for robotic TTVR and, to our knowledge, completes the first animal study that not only successfully demonstrates the application of hybrid enhanced intelligence in interventional robotics, but also provides a solution with high application value for a cutting-edge procedure.
IoT-based Remote Control Study of a Robotic Trans-esophageal Ultrasound Probe via LAN and 5G
May 28, 2020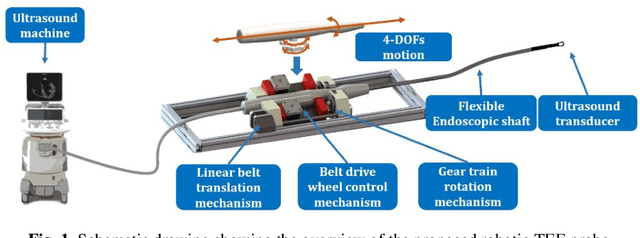
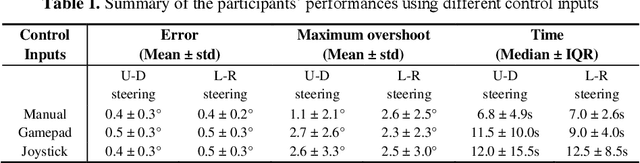
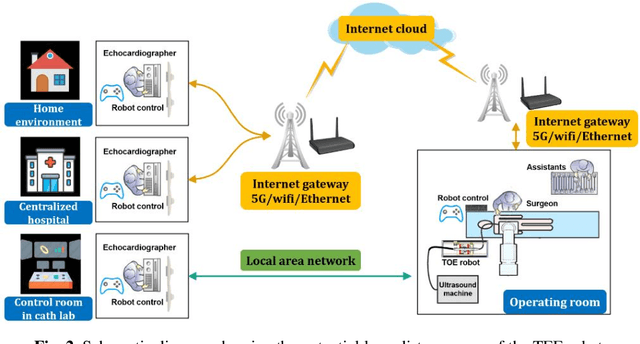
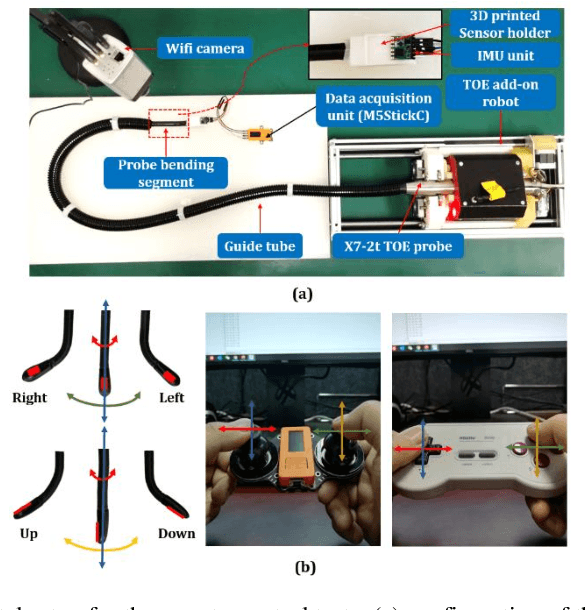
A robotic trans-esophageal echocardiography (TEE) probe has been recently developed to address the problems with manual control in the X-ray envi-ronment when a conventional probe is used for interventional procedure guidance. However, the robot was exclusively to be used in local areas and the effectiveness of remote control has not been scientifically tested. In this study, we implemented an Internet-of-things (IoT)-based configuration to the TEE robot so the system can set up a local area network (LAN) or be configured to connect to an internet cloud over 5G. To investigate the re-mote control, backlash hysteresis effects were measured and analysed. A joy-stick-based device and a button-based gamepad were then employed and compared with the manual control in a target reaching experiment for the two steering axes. The results indicated different hysteresis curves for the left-right and up-down steering axes with the input wheel's deadbands found to be 15 deg and deg, respectively. Similar magnitudes of positioning errors at approximately 0.5 deg and maximum overshoots at around 2.5 deg were found when manually and robotically controlling the TEE probe. The amount of time to finish the task indicated a better performance using the button-based gamepad over joystick-based device, although both were worse than the manual control. It is concluded that the IoT-based remote control of the TEE probe is feasible and a trained user can accurately manipulate the probe. The main identified problem was the backlash hysteresis in the steering axes, which can result in continuous oscillations and overshoots.
Design of a Low-cost Miniature Robot to Assist the COVID-19 Nasopharyngeal Swab Sampling
May 26, 2020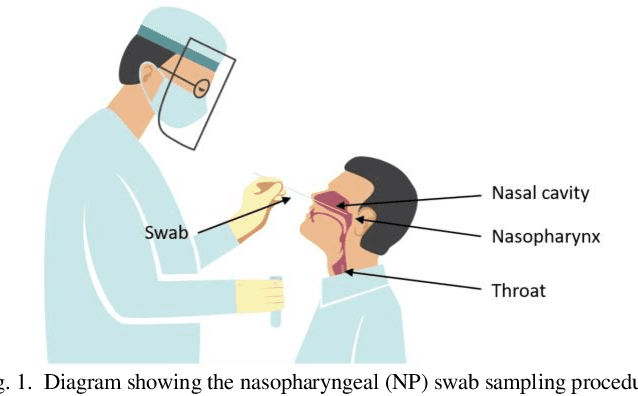
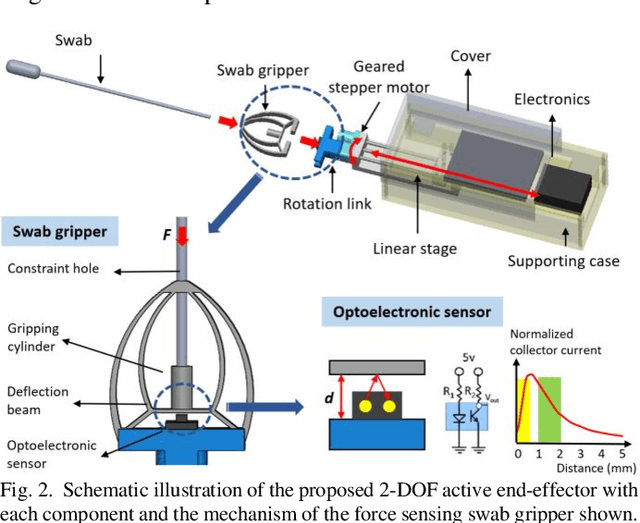
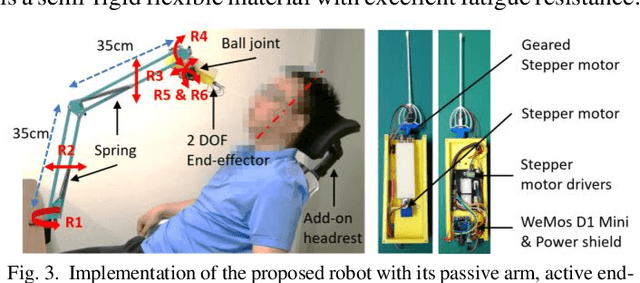
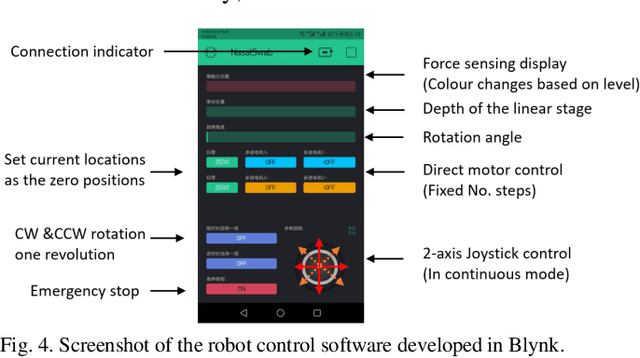
Nasopharyngeal (NP) swab sampling is an effective approach for the diagnosis of coronavirus disease 2019 (COVID-19). Medical staffs carrying out the task of collecting NP specimens are in close contact with the suspected patient, thereby posing a high risk of cross-infection. We propose a low-cost miniature robot that can be easily assembled and remotely controlled. The system includes an active end-effector, a passive positioning arm, and a detachable swab gripper with integrated force sensing capability. The cost of the materials for building this robot is 55 USD and the total weight of the functional part is 0.23kg. The design of the force sensing swab gripper was justified using Finite Element (FE) modeling and the performances of the robot were validated with a simulation phantom and three pig noses. FE analysis indicated a 0.5mm magnitude displacement of the gripper's sensing beam, which meets the ideal detecting range of the optoelectronic sensor. Studies on both the phantom and the pig nose demonstrated the successful operation of the robot during the collection task. The average forces were found to be 0.35N and 0.85N, respectively. It is concluded that the proposed robot is promising and could be further developed to be used in vivo.
Design and integration of a parallel, soft robotic end-effector for extracorporeal ultrasound
Jun 11, 2019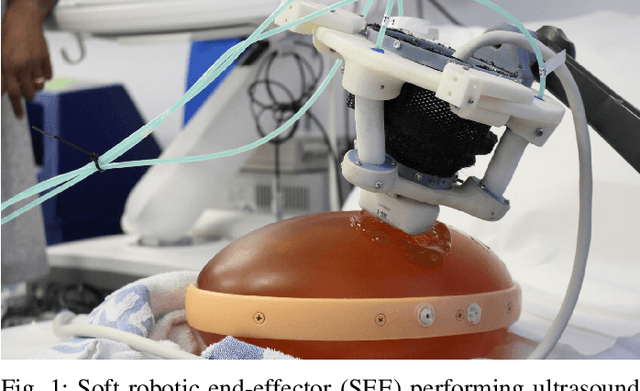
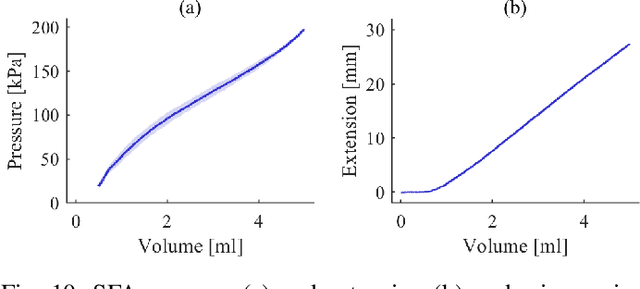
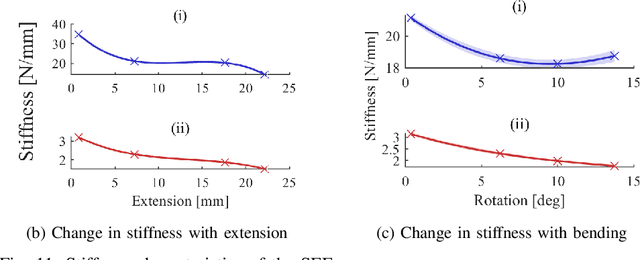
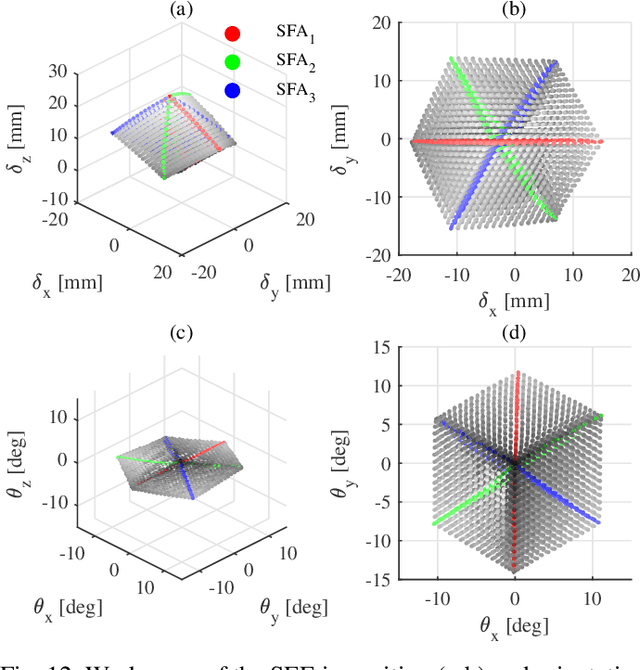
In this work we address limitations in state-of-the-art ultrasound robots by designing and integrating the first soft robotic system for ultrasound imaging. It makes use of the inherent qualities of soft robotics technologies to establish a safe, adaptable interaction between ultrasound probe and patient. We acquire clinical data to establish the movement ranges and force levels required in prenatal foetal ultrasound imaging and design our system accordingly. The end-effector's stiffness characteristics allow for it to reach the desired workspace while maintaining a stable contact between ultrasound probe and patient under the determined loads. The system exhibits a high degree of safety due to its inherent compliance in the transversal direction. We verify the mechanical characteristics of the end-effector, derive and validate a kinetostatic model and demonstrate the robot's controllability with and without external loading. The imaging capabilities of the robot are shown in a tele-operated setting on a foetal phantom. The design exhibits the desired stiffness characteristics with a high stiffness along the ultrasound transducer and a high compliance in lateral direction. Twist is constrained using a braided mesh reinforcement. The model can accurately predict the end-effector pose with a mean error of about 6% in position 7% in orientation. The derived controller is, with an average position error of 0.39mm able to track a target pose efficiently without and with externally applied loads. Finally, the images acquired with the system are of equally good quality compared to a manual sonographer scan.
Robotic-assisted Ultrasound for Fetal Imaging: Evolution from Single-arm to Dual-arm System
Apr 10, 2019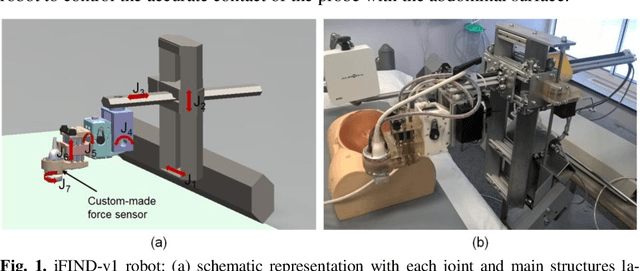
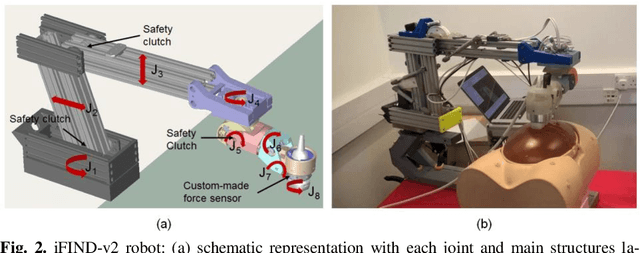
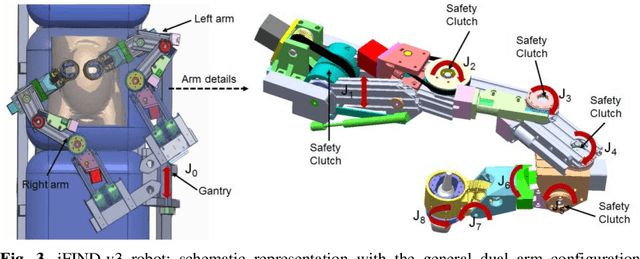
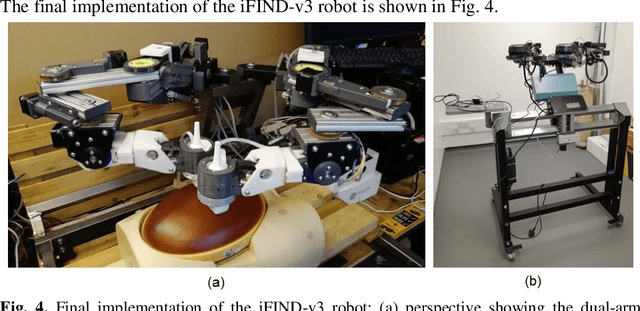
The development of robotic-assisted extracorporeal ultrasound systems has a long history and a number of projects have been proposed since the 1990s focusing on different technical aspects. These aim to resolve the deficiencies of on-site manual manipulation of hand-held ultrasound probes. This paper presents the recent ongoing developments of a series of bespoke robotic systems, including both single-arm and dual-arm versions, for a project known as intelligent Fetal Imaging and Diagnosis (iFIND). After a brief review of the development history of the extracorporeal ultrasound robotic system used for fetal and abdominal examinations, the specific aim of the iFIND robots, the design evolution, the implementation details of each version, and the initial clinical feedback of the iFIND robot series are presented. Based on the preliminary testing of these newly-proposed robots on 42 volunteers, the successful and re-liable working of the mechatronic systems were validated. Analysis of a participant questionnaire indicates a comfortable scanning experience for the volunteers and a good acceptance rate to being scanned by the robots.