 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHGATSolver: A Heterogeneous Graph Attention Solver for Fluid-Structure Interaction
Jan 14, 2026Fluid-structure interaction (FSI) systems involve distinct physical domains, fluid and solid, governed by different partial differential equations and coupled at a dynamic interface. While learning-based solvers offer a promising alternative to costly numerical simulations, existing methods struggle to capture the heterogeneous dynamics of FSI within a unified framework. This challenge is further exacerbated by inconsistencies in response across domains due to interface coupling and by disparities in learning difficulty across fluid and solid regions, leading to instability during prediction. To address these challenges, we propose the Heterogeneous Graph Attention Solver (HGATSolver). HGATSolver encodes the system as a heterogeneous graph, embedding physical structure directly into the model via distinct node and edge types for fluid, solid, and interface regions. This enables specialized message-passing mechanisms tailored to each physical domain. To stabilize explicit time stepping, we introduce a novel physics-conditioned gating mechanism that serves as a learnable, adaptive relaxation factor. Furthermore, an Inter-domain Gradient-Balancing Loss dynamically balances the optimization objectives across domains based on predictive uncertainty. Extensive experiments on two constructed FSI benchmarks and a public dataset demonstrate that HGATSolver achieves state-of-the-art performance, establishing an effective framework for surrogate modeling of coupled multi-physics systems.
Task-Oriented Learning for Automatic EEG Denoising
Sep 18, 2025Electroencephalography (EEG) denoising methods typically depend on manual intervention or clean reference signals. This work introduces a task-oriented learning framework for automatic EEG denoising that uses only task labels without clean reference signals. EEG recordings are first decomposed into components based on blind source separation (BSS) techniques. Then, a learning-based selector assigns a retention probability to each component, and the denoised signal is reconstructed as a probability-weighted combination. A downstream proxy-task model evaluates the reconstructed signal, with its task loss supervising the selector in a collaborative optimization scheme that relies solely on task labels, eliminating the need for clean EEG references. Experiments on three datasets spanning two paradigms and multiple noise conditions show consistent gains in both task performance (accuracy: $2.56\%\uparrow$) and standard signal-quality metrics (signal-to-noise-ratio: $0.82$\,dB\,$\uparrow$). Further analyses demonstrate that the task-oriented learning framework is algorithm-agnostic, as it accommodates diverse decomposition techniques and network backbones for both the selector and the proxy model. These promising results indicate that the proposed task-oriented learning framework is a practical EEG denoising solution with potential implications for neuroscience research and EEG-based interaction systems.
Parallels Between VLA Model Post-Training and Human Motor Learning: Progress, Challenges, and Trends
Jun 26, 2025Vision-language-action (VLA) models extend vision-language models (VLM) by integrating action generation modules for robotic manipulation. Leveraging strengths of VLM in vision perception and instruction understanding, VLA models exhibit promising generalization across diverse manipulation tasks. However, applications demanding high precision and accuracy reveal performance gaps without further adaptation. Evidence from multiple domains highlights the critical role of post-training to align foundational models with downstream applications, spurring extensive research on post-training VLA models. VLA model post-training aims to address the challenge of improving an embodiment's ability to interact with the environment for the given tasks, analogous to the process of humans motor skills acquisition. Accordingly, this paper reviews post-training strategies for VLA models through the lens of human motor learning, focusing on three dimensions: environments, embodiments, and tasks. A structured taxonomy is introduced aligned with human learning mechanisms: (1) enhancing environmental perception, (2) improving embodiment awareness, (3) deepening task comprehension, and (4) multi-component integration. Finally, key challenges and trends in post-training VLA models are identified, establishing a conceptual framework to guide future research. This work delivers both a comprehensive overview of current VLA model post-training methods from a human motor learning perspective and practical insights for VLA model development. (Project website: https://github.com/AoqunJin/Awesome-VLA-Post-Training)
CAS-IQA: Teaching Vision-Language Models for Synthetic Angiography Quality Assessment
May 23, 2025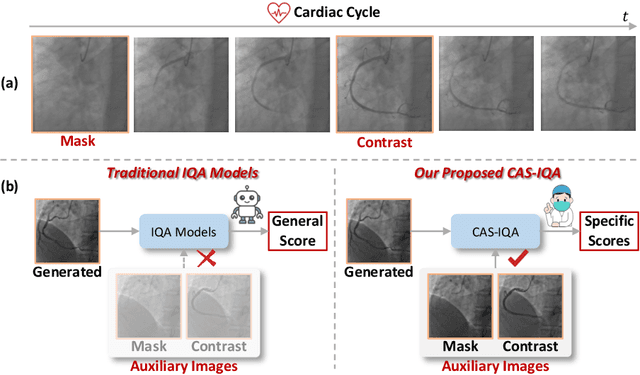
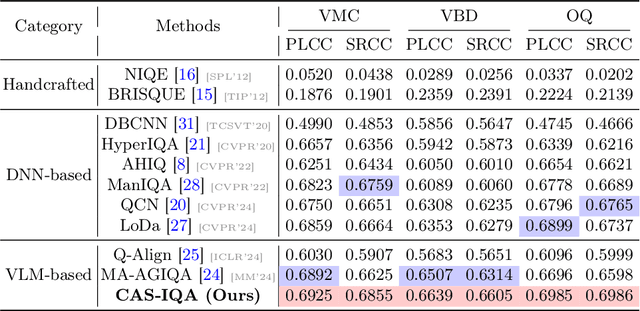
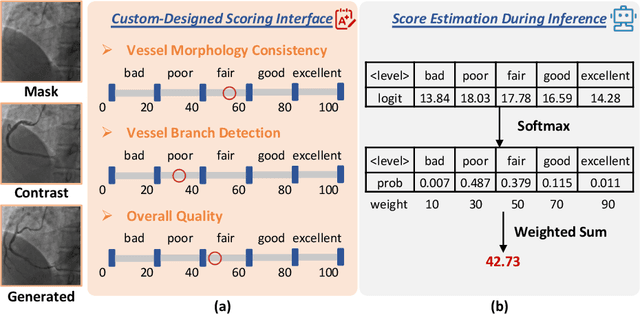

Synthetic X-ray angiographies generated by modern generative models hold great potential to reduce the use of contrast agents in vascular interventional procedures. However, low-quality synthetic angiographies can significantly increase procedural risk, underscoring the need for reliable image quality assessment (IQA) methods. Existing IQA models, however, fail to leverage auxiliary images as references during evaluation and lack fine-grained, task-specific metrics necessary for clinical relevance. To address these limitations, this paper proposes CAS-IQA, a vision-language model (VLM)-based framework that predicts fine-grained quality scores by effectively incorporating auxiliary information from related images. In the absence of angiography datasets, CAS-3K is constructed, comprising 3,565 synthetic angiographies along with score annotations. To ensure clinically meaningful assessment, three task-specific evaluation metrics are defined. Furthermore, a Multi-path featUre fuSion and rouTing (MUST) module is designed to enhance image representations by adaptively fusing and routing visual tokens to metric-specific branches. Extensive experiments on the CAS-3K dataset demonstrate that CAS-IQA significantly outperforms state-of-the-art IQA methods by a considerable margin.
VLA Model-Expert Collaboration for Bi-directional Manipulation Learning
Mar 06, 2025The emergence of vision-language-action (VLA) models has given rise to foundation models for robot manipulation. Although these models have achieved significant improvements, their generalization in multi-task manipulation remains limited. This study proposes a VLA model-expert collaboration framework that leverages a limited number of expert actions to enhance VLA model performance. This approach reduces expert workload relative to manual operation while simultaneously improving the reliability and generalization of VLA models. Furthermore, manipulation data collected during collaboration can further refine the VLA model, while human participants concurrently enhance their skills. This bi-directional learning loop boosts the overall performance of the collaboration system. Experimental results across various VLA models demonstrate the effectiveness of the proposed system in collaborative manipulation and learning, as evidenced by improved success rates across tasks. Additionally, validation using a brain-computer interface (BCI) indicates that the collaboration system enhances the efficiency of low-speed action systems by involving VLA model during manipulation. These promising results pave the way for advancing human-robot interaction in the era of foundation models for robotics. (Project website: https://aoqunjin.github.io/Expert-VLA/)
LEASE: Offline Preference-based Reinforcement Learning with High Sample Efficiency
Dec 30, 2024



Offline preference-based reinforcement learning (PbRL) provides an effective way to overcome the challenges of designing reward and the high costs of online interaction. However, since labeling preference needs real-time human feedback, acquiring sufficient preference labels is challenging. To solve this, this paper proposes a offLine prEference-bAsed RL with high Sample Efficiency (LEASE) algorithm, where a learned transition model is leveraged to generate unlabeled preference data. Considering the pretrained reward model may generate incorrect labels for unlabeled data, we design an uncertainty-aware mechanism to ensure the performance of reward model, where only high confidence and low variance data are selected. Moreover, we provide the generalization bound of reward model to analyze the factors influencing reward accuracy, and demonstrate that the policy learned by LEASE has theoretical improvement guarantee. The developed theory is based on state-action pair, which can be easily combined with other offline algorithms. The experimental results show that LEASE can achieve comparable performance to baseline under fewer preference data without online interaction.
Learning Novel Skills from Language-Generated Demonstrations
Dec 12, 2024Current robot learning algorithms for acquiring novel skills often rely on demonstration datasets or environment interactions, resulting in high labor costs and potential safety risks. To address these challenges, this study proposes a skill-learning framework that enables robots to acquire novel skills from natural language instructions. The proposed pipeline leverages vision-language models to generate demonstration videos of novel skills, which are processed by an inverse dynamics model to extract actions from the unlabeled demonstrations. These actions are subsequently mapped to environmental contexts via imitation learning, enabling robots to learn new skills effectively. Experimental evaluations in the MetaWorld simulation environments demonstrate the pipeline's capability to generate high-fidelity and reliable demonstrations. Using the generated demonstrations, various skill learning algorithms achieve an accomplishment rate three times the original on novel tasks. These results highlight a novel approach to robot learning, offering a foundation for the intuitive and intelligent acquisition of novel robotic skills.
Robotic transcatheter tricuspid valve replacement with hybrid enhanced intelligence: a new paradigm and first-in-vivo study
Nov 19, 2024



Transcatheter tricuspid valve replacement (TTVR) is the latest treatment for tricuspid regurgitation and is in the early stages of clinical adoption. Intelligent robotic approaches are expected to overcome the challenges of surgical manipulation and widespread dissemination, but systems and protocols with high clinical utility have not yet been reported. In this study, we propose a complete solution that includes a passive stabilizer, robotic drive, detachable delivery catheter and valve manipulation mechanism. Working towards autonomy, a hybrid augmented intelligence approach based on reinforcement learning, Monte Carlo probabilistic maps and human-robot co-piloted control was introduced. Systematic tests in phantom and first-in-vivo animal experiments were performed to verify that the system design met the clinical requirement. Furthermore, the experimental results confirmed the advantages of co-piloted control over conventional master-slave control in terms of time efficiency, control efficiency, autonomy and stability of operation. In conclusion, this study provides a comprehensive pathway for robotic TTVR and, to our knowledge, completes the first animal study that not only successfully demonstrates the application of hybrid enhanced intelligence in interventional robotics, but also provides a solution with high application value for a cutting-edge procedure.
CAS-GAN for Contrast-free Angiography Synthesis
Oct 11, 2024Iodinated contrast agents are widely utilized in numerous interventional procedures, yet posing substantial health risks to patients. This paper presents CAS-GAN, a novel GAN framework that serves as a ``virtual contrast agent" to synthesize X-ray angiographies via disentanglement representation learning and vessel semantic guidance, thereby reducing the reliance on iodinated agents during interventional procedures. Specifically, our approach disentangles X-ray angiographies into background and vessel components, leveraging medical prior knowledge. A specialized predictor then learns to map the interrelationships between these components. Additionally, a vessel semantic-guided generator and a corresponding loss function are introduced to enhance the visual fidelity of generated images. Experimental results on the XCAD dataset demonstrate the state-of-the-art performance of our CAS-GAN, achieving a FID of 5.94 and a MMD of 0.017. These promising results highlight CAS-GAN's potential for clinical applications.
SPIRONet: Spatial-Frequency Learning and Topological Channel Interaction Network for Vessel Segmentation
Jun 28, 2024
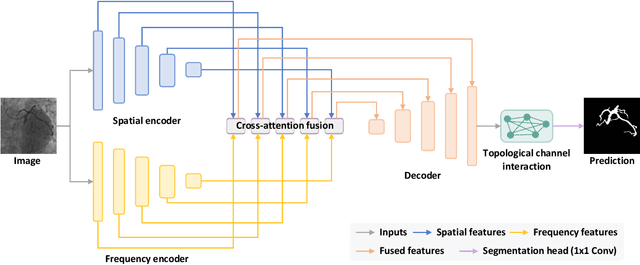
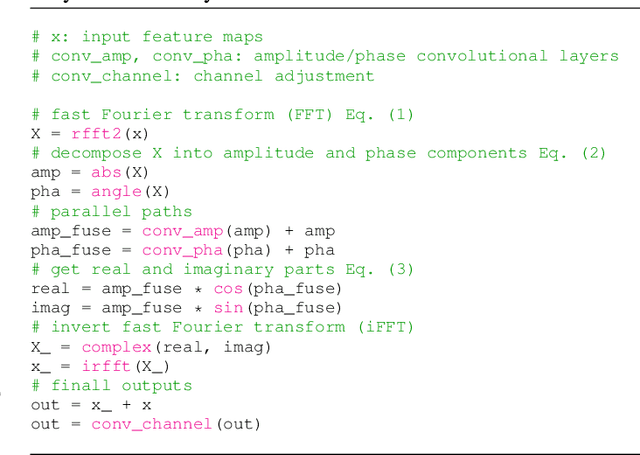
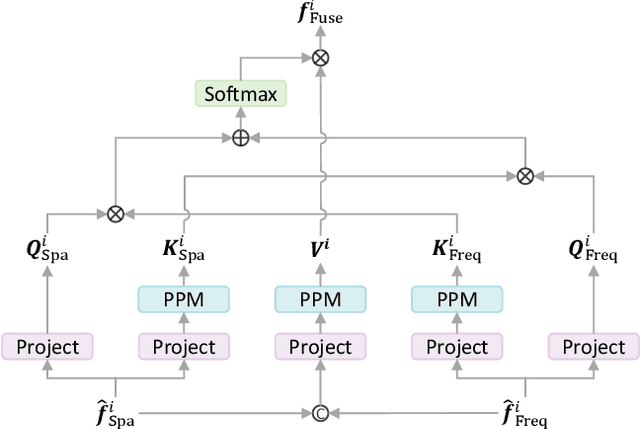
Automatic vessel segmentation is paramount for developing next-generation interventional navigation systems. However, current approaches suffer from suboptimal segmentation performances due to significant challenges in intraoperative images (i.e., low signal-to-noise ratio, small or slender vessels, and strong interference). In this paper, a novel spatial-frequency learning and topological channel interaction network (SPIRONet) is proposed to address the above issues. Specifically, dual encoders are utilized to comprehensively capture local spatial and global frequency vessel features. Then, a cross-attention fusion module is introduced to effectively fuse spatial and frequency features, thereby enhancing feature discriminability. Furthermore, a topological channel interaction module is designed to filter out task-irrelevant responses based on graph neural networks. Extensive experimental results on several challenging datasets (CADSA, CAXF, DCA1, and XCAD) demonstrate state-of-the-art performances of our method. Moreover, the inference speed of SPIRONet is 21 FPS with a 512x512 input size, surpassing clinical real-time requirements (6~12FPS). These promising outcomes indicate SPIRONet's potential for integration into vascular interventional navigation systems. Code is available at https://github.com/Dxhuang-CASIA/SPIRONet.