 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-shot Image Classification based on Gradual Machine Learning
Jul 28, 2023
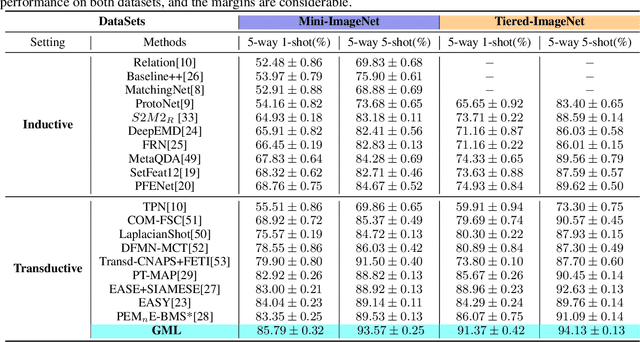
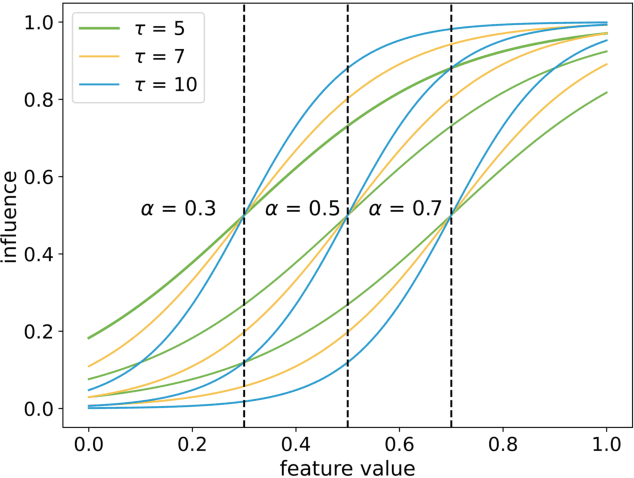
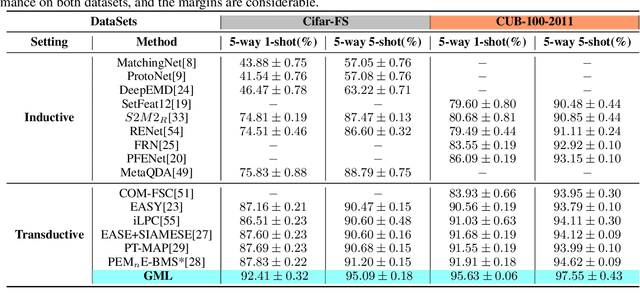
Few-shot image classification aims to accurately classify unlabeled images using only a few labeled samples. The state-of-the-art solutions are built by deep learning, which focuses on designing increasingly complex deep backbones. Unfortunately, the task remains very challenging due to the difficulty of transferring the knowledge learned in training classes to new ones. In this paper, we propose a novel approach based on the non-i.i.d paradigm of gradual machine learning (GML). It begins with only a few labeled observations, and then gradually labels target images in the increasing order of hardness by iterative factor inference in a factor graph. Specifically, our proposed solution extracts indicative feature representations by deep backbones, and then constructs both unary and binary factors based on the extracted features to facilitate gradual learning. The unary factors are constructed based on class center distance in an embedding space, while the binary factors are constructed based on k-nearest neighborhood. We have empirically validated the performance of the proposed approach on benchmark datasets by a comparative study. Our extensive experiments demonstrate that the proposed approach can improve the SOTA performance by 1-5% in terms of accuracy. More notably, it is more robust than the existing deep models in that its performance can consistently improve as the size of query set increases while the performance of deep models remains essentially flat or even becomes worse.
Design of a Low-cost Miniature Robot to Assist the COVID-19 Nasopharyngeal Swab Sampling
May 26, 2020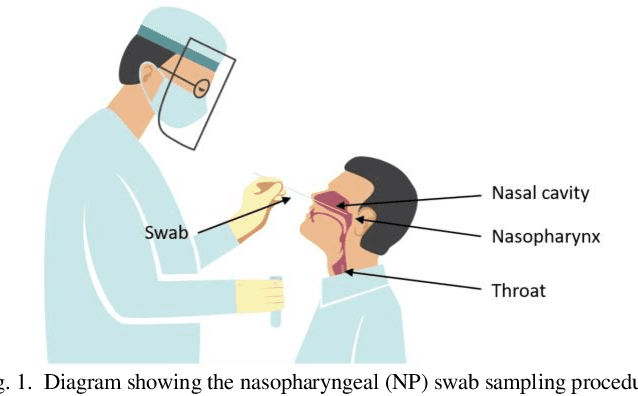
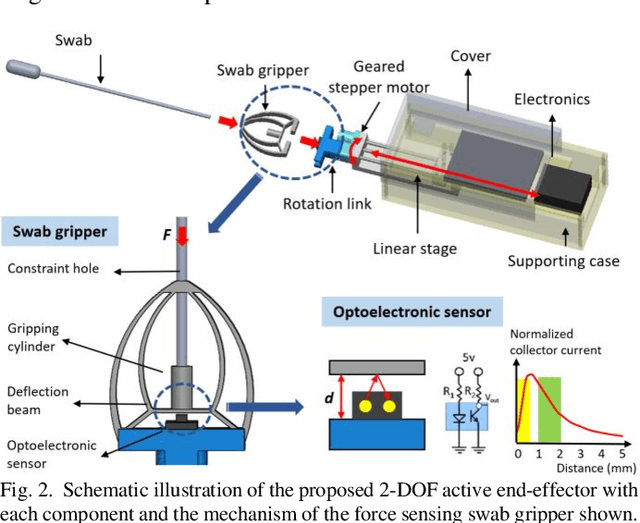
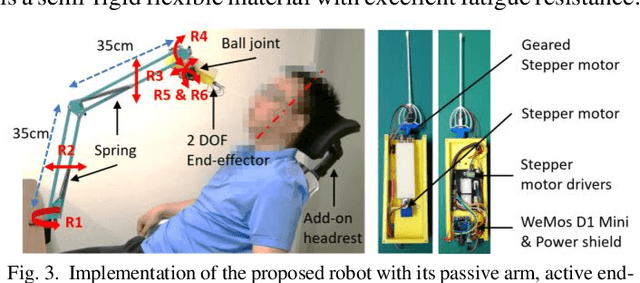
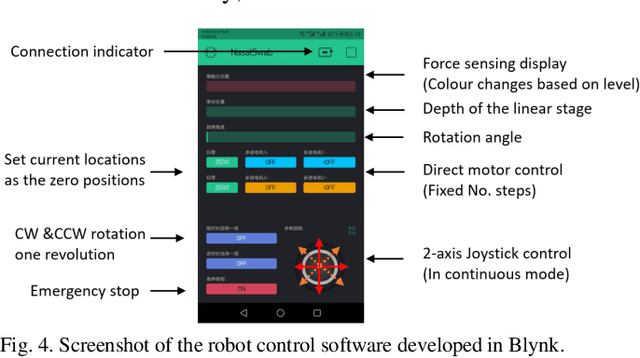
Nasopharyngeal (NP) swab sampling is an effective approach for the diagnosis of coronavirus disease 2019 (COVID-19). Medical staffs carrying out the task of collecting NP specimens are in close contact with the suspected patient, thereby posing a high risk of cross-infection. We propose a low-cost miniature robot that can be easily assembled and remotely controlled. The system includes an active end-effector, a passive positioning arm, and a detachable swab gripper with integrated force sensing capability. The cost of the materials for building this robot is 55 USD and the total weight of the functional part is 0.23kg. The design of the force sensing swab gripper was justified using Finite Element (FE) modeling and the performances of the robot were validated with a simulation phantom and three pig noses. FE analysis indicated a 0.5mm magnitude displacement of the gripper's sensing beam, which meets the ideal detecting range of the optoelectronic sensor. Studies on both the phantom and the pig nose demonstrated the successful operation of the robot during the collection task. The average forces were found to be 0.35N and 0.85N, respectively. It is concluded that the proposed robot is promising and could be further developed to be used in vivo.
On Optimality of Greedy Policy for a Class of Standard Reward Function of Restless Multi-armed Bandit Problem
Apr 28, 2011In this paper,we consider the restless bandit problem, which is one of the most well-studied generalizations of the celebrated stochastic multi-armed bandit problem in decision theory. However, it is known be PSPACE-Hard to approximate to any non-trivial factor. Thus the optimality is very difficult to obtain due to its high complexity. A natural method is to obtain the greedy policy considering its stability and simplicity. However, the greedy policy will result in the optimality loss for its intrinsic myopic behavior generally. In this paper, by analyzing one class of so-called standard reward function, we establish the closed-form condition about the discounted factor \beta such that the optimality of the greedy policy is guaranteed under the discounted expected reward criterion, especially, the condition \beta = 1 indicating the optimality of the greedy policy under the average accumulative reward criterion. Thus, the standard form of reward function can easily be used to judge the optimality of the greedy policy without any complicated calculation. Some examples in cognitive radio networks are presented to verify the effectiveness of the mathematical result in judging the optimality of the greedy policy.