 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTWC-SLAM: Multi-Agent Cooperative SLAM with Text Semantics and WiFi Features Integration for Similar Indoor Environments
Oct 26, 2025Multi-agent cooperative SLAM often encounters challenges in similar indoor environments characterized by repetitive structures, such as corridors and rooms. These challenges can lead to significant inaccuracies in shared location identification when employing point cloud-based techniques. To mitigate these issues, we introduce TWC-SLAM, a multi-agent cooperative SLAM framework that integrates text semantics and WiFi signal features to enhance location identification and loop closure detection. TWC-SLAM comprises a single-agent front-end odometry module based on FAST-LIO2, a location identification and loop closure detection module that leverages text semantics and WiFi features, and a global mapping module. The agents are equipped with sensors capable of capturing textual information and detecting WiFi signals. By correlating these data sources, TWC-SLAM establishes a common location, facilitating point cloud alignment across different agents' maps. Furthermore, the system employs loop closure detection and optimization modules to achieve global optimization and cohesive mapping. We evaluated our approach using an indoor dataset featuring similar corridors, rooms, and text signs. The results demonstrate that TWC-SLAM significantly improves the performance of cooperative SLAM systems in complex environments with repetitive architectural features.
Double Helix Diffusion for Cross-Domain Anomaly Image Generation
Sep 16, 2025Visual anomaly inspection is critical in manufacturing, yet hampered by the scarcity of real anomaly samples for training robust detectors. Synthetic data generation presents a viable strategy for data augmentation; however, current methods remain constrained by two principal limitations: 1) the generation of anomalies that are structurally inconsistent with the normal background, and 2) the presence of undesirable feature entanglement between synthesized images and their corresponding annotation masks, which undermines the perceptual realism of the output. This paper introduces Double Helix Diffusion (DH-Diff), a novel cross-domain generative framework designed to simultaneously synthesize high-fidelity anomaly images and their pixel-level annotation masks, explicitly addressing these challenges. DH-Diff employs a unique architecture inspired by a double helix, cycling through distinct modules for feature separation, connection, and merging. Specifically, a domain-decoupled attention mechanism mitigates feature entanglement by enhancing image and annotation features independently, and meanwhile a semantic score map alignment module ensures structural authenticity by coherently integrating anomaly foregrounds. DH-Diff offers flexible control via text prompts and optional graphical guidance. Extensive experiments demonstrate that DH-Diff significantly outperforms state-of-the-art methods in diversity and authenticity, leading to significant improvements in downstream anomaly detection performance.
POEv2: a flexible and robust framework for generic line segment detection and wireframe line segment detection
Aug 27, 2025Line segment detection in images has been studied for several decades. Existing line segment detectors can be roughly divided into two categories: generic line segment detectors and wireframe line segment detectors. Generic line segment detectors aim to detect all meaningful line segments in images and traditional approaches usually fall into this category. Recent deep learning based approaches are mostly wireframe line segment detectors. They detect only line segments that are geometrically meaningful and have large spatial support. Due to the difference in the aim of design, the performance of generic line segment detectors for the task of wireframe line segment detection won't be satisfactory, and vice versa. In this work, we propose a robust framework that can be used for both generic line segment detection and wireframe line segment detection. The proposed method is an improved version of the Pixel Orientation Estimation (POE) method. It is thus named as POEv2. POEv2 detects line segments from edge strength maps, and can be combined with any edge detector. We show in our experiments that by combining the proposed POEv2 with an efficient edge detector, it achieves state-of-the-art performance on three publicly available datasets.
A Two-Stage Lightweight Framework for Efficient Land-Air Bimodal Robot Autonomous Navigation
Jul 30, 2025
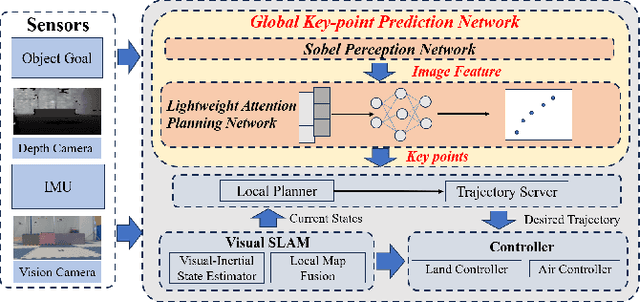
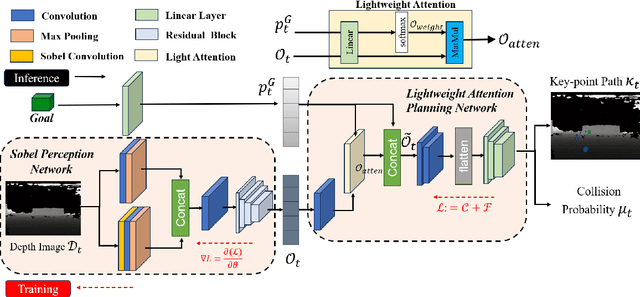
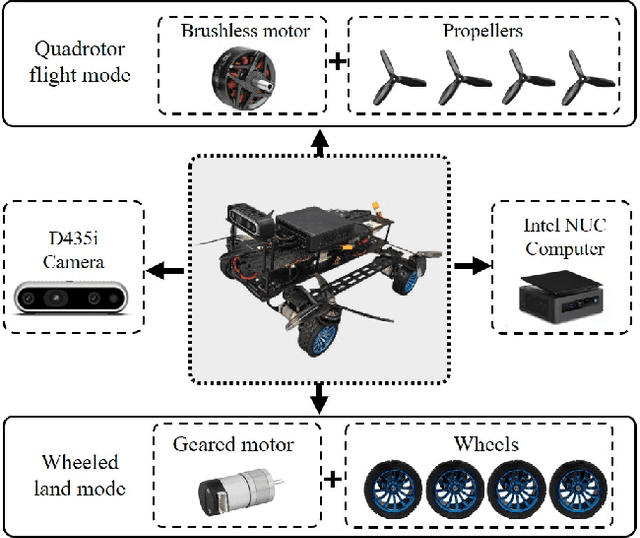
Land-air bimodal robots (LABR) are gaining attention for autonomous navigation, combining high mobility from aerial vehicles with long endurance from ground vehicles. However, existing LABR navigation methods are limited by suboptimal trajectories from mapping-based approaches and the excessive computational demands of learning-based methods. To address this, we propose a two-stage lightweight framework that integrates global key points prediction with local trajectory refinement to generate efficient and reachable trajectories. In the first stage, the Global Key points Prediction Network (GKPN) was used to generate a hybrid land-air keypoint path. The GKPN includes a Sobel Perception Network (SPN) for improved obstacle detection and a Lightweight Attention Planning Network (LAPN) to improves predictive ability by capturing contextual information. In the second stage, the global path is segmented based on predicted key points and refined using a mapping-based planner to create smooth, collision-free trajectories. Experiments conducted on our LABR platform show that our framework reduces network parameters by 14\% and energy consumption during land-air transitions by 35\% compared to existing approaches. The framework achieves real-time navigation without GPU acceleration and enables zero-shot transfer from simulation to reality during
Fast Feature Matching of UAV Images via Matrix Band Reduction-based GPU Data Schedule
May 28, 2025Feature matching dominats the time costs in structure from motion (SfM). The primary contribution of this study is a GPU data schedule algorithm for efficient feature matching of Unmanned aerial vehicle (UAV) images. The core idea is to divide the whole dataset into blocks based on the matrix band reduction (MBR) and achieve efficient feature matching via GPU-accelerated cascade hashing. First, match pairs are selected by using an image retrieval technique, which converts images into global descriptors and searches high-dimension nearest neighbors with graph indexing. Second, compact image blocks are iteratively generated from a MBR-based data schedule strategy, which exploits image connections to avoid redundant data IO (input/output) burden and increases the usage of GPU computing power. Third, guided by the generated image blocks, feature matching is executed sequentially within the framework of GPU-accelerated cascade hashing, and initial candidate matches are refined by combining a local geometric constraint and RANSAC-based global verification. For further performance improvement, these two seps are designed to execute parallelly in GPU and CPU. Finally, the performance of the proposed solution is evaluated by using large-scale UAV datasets. The results demonstrate that it increases the efficiency of feature matching with speedup ratios ranging from 77.0 to 100.0 compared with KD-Tree based matching methods, and achieves comparable accuracy in relative and absolute bundle adjustment (BA). The proposed algorithm is an efficient solution for feature matching of UAV images.
UAVPairs: A Challenging Benchmark for Match Pair Retrieval of Large-scale UAV Images
May 28, 2025

The primary contribution of this paper is a challenging benchmark dataset, UAVPairs, and a training pipeline designed for match pair retrieval of large-scale UAV images. First, the UAVPairs dataset, comprising 21,622 high-resolution images across 30 diverse scenes, is constructed; the 3D points and tracks generated by SfM-based 3D reconstruction are employed to define the geometric similarity of image pairs, ensuring genuinely matchable image pairs are used for training. Second, to solve the problem of expensive mining cost for global hard negative mining, a batched nontrivial sample mining strategy is proposed, leveraging the geometric similarity and multi-scene structure of the UAVPairs to generate training samples as to accelerate training. Third, recognizing the limitation of pair-based losses, the ranked list loss is designed to improve the discrimination of image retrieval models, which optimizes the global similarity structure constructed from the positive set and negative set. Finally, the effectiveness of the UAVPairs dataset and training pipeline is validated through comprehensive experiments on three distinct large-scale UAV datasets. The experiment results demonstrate that models trained with the UAVPairs dataset and the ranked list loss achieve significantly improved retrieval accuracy compared to models trained on existing datasets or with conventional losses. Furthermore, these improvements translate to enhanced view graph connectivity and higher quality of reconstructed 3D models. The models trained by the proposed approach perform more robustly compared with hand-crafted global features, particularly in challenging repetitively textured scenes and weakly textured scenes. For match pair retrieval of large-scale UAV images, the trained image retrieval models offer an effective solution. The dataset would be made publicly available at https://github.com/json87/UAVPairs.
Urban Representation Learning for Fine-grained Economic Mapping: A Semi-supervised Graph-based Approach
May 16, 2025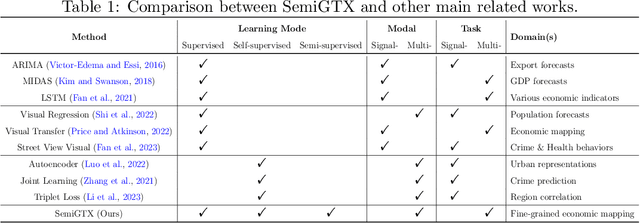
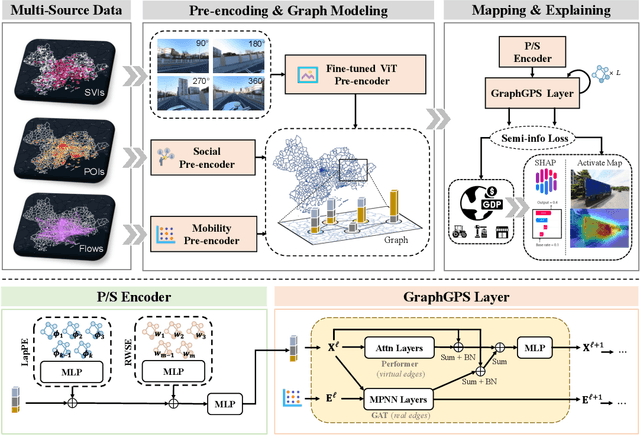


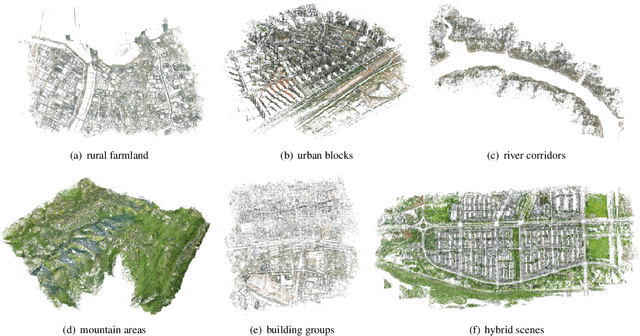
Fine-grained economic mapping through urban representation learning has emerged as a crucial tool for evidence-based economic decisions. While existing methods primarily rely on supervised or unsupervised approaches, they often overlook semi-supervised learning in data-scarce scenarios and lack unified multi-task frameworks for comprehensive sectoral economic analysis. To address these gaps, we propose SemiGTX, an explainable semi-supervised graph learning framework for sectoral economic mapping. The framework is designed with dedicated fusion encoding modules for various geospatial data modalities, seamlessly integrating them into a cohesive graph structure. It introduces a semi-information loss function that combines spatial self-supervision with locally masked supervised regression, enabling more informative and effective region representations. Through multi-task learning, SemiGTX concurrently maps GDP across primary, secondary, and tertiary sectors within a unified model. Extensive experiments conducted in the Pearl River Delta region of China demonstrate the model's superior performance compared to existing methods, achieving R2 scores of 0.93, 0.96, and 0.94 for the primary, secondary and tertiary sectors, respectively. Cross-regional experiments in Beijing and Chengdu further illustrate its generality. Systematic analysis reveals how different data modalities influence model predictions, enhancing explainability while providing valuable insights for regional development planning. This representation learning framework advances regional economic monitoring through diverse urban data integration, providing a robust foundation for precise economic forecasting.
Exploring Embodied Multimodal Large Models: Development, Datasets, and Future Directions
Feb 21, 2025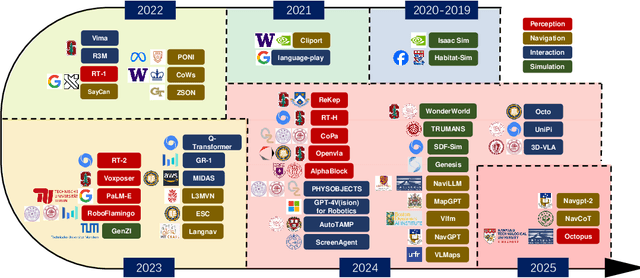
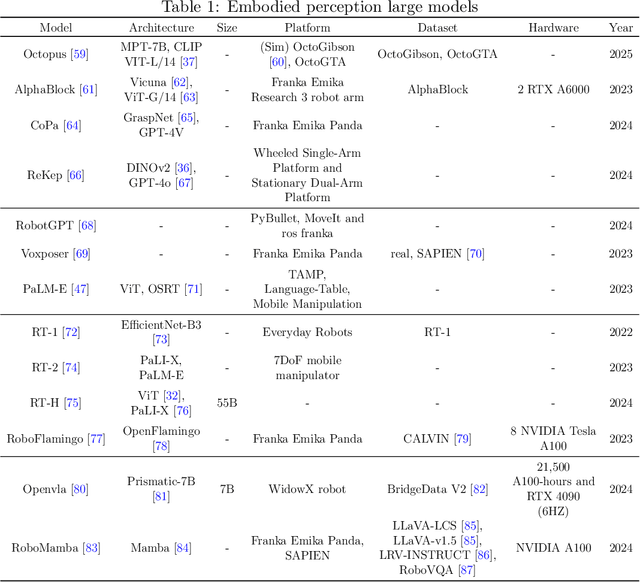
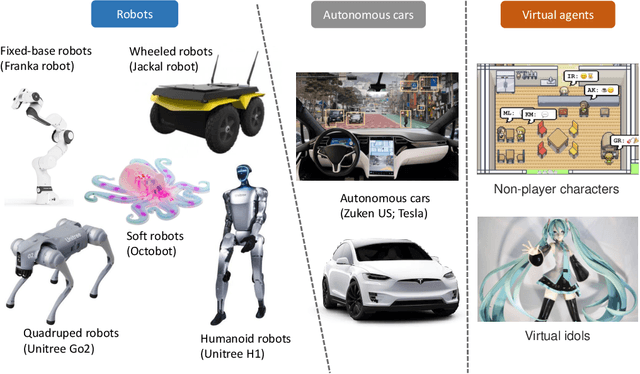
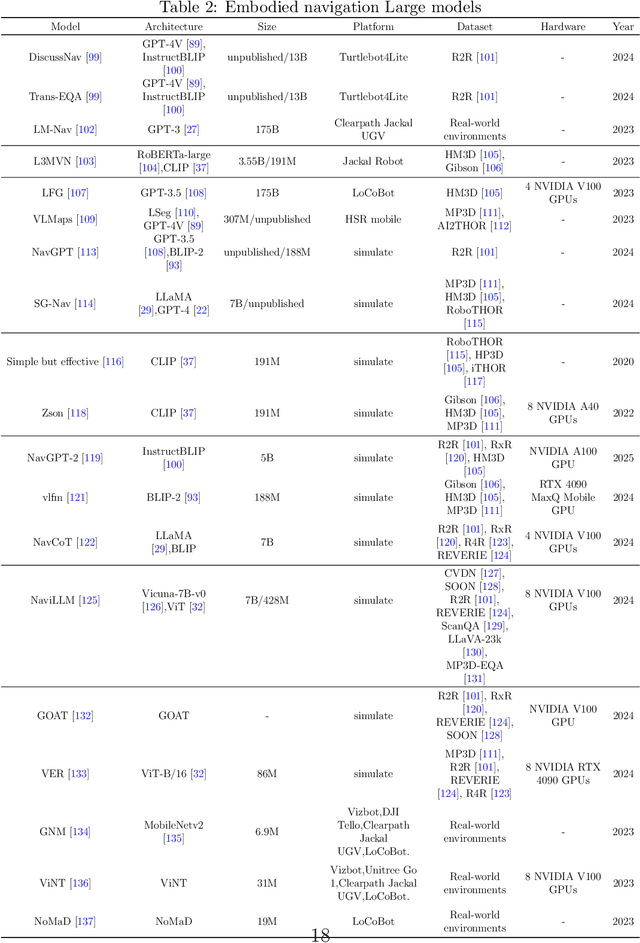
Embodied multimodal large models (EMLMs) have gained significant attention in recent years due to their potential to bridge the gap between perception, cognition, and action in complex, real-world environments. This comprehensive review explores the development of such models, including Large Language Models (LLMs), Large Vision Models (LVMs), and other models, while also examining other emerging architectures. We discuss the evolution of EMLMs, with a focus on embodied perception, navigation, interaction, and simulation. Furthermore, the review provides a detailed analysis of the datasets used for training and evaluating these models, highlighting the importance of diverse, high-quality data for effective learning. The paper also identifies key challenges faced by EMLMs, including issues of scalability, generalization, and real-time decision-making. Finally, we outline future directions, emphasizing the integration of multimodal sensing, reasoning, and action to advance the development of increasingly autonomous systems. By providing an in-depth analysis of state-of-the-art methods and identifying critical gaps, this paper aims to inspire future advancements in EMLMs and their applications across diverse domains.
NeurOp-Diff:Continuous Remote Sensing Image Super-Resolution via Neural Operator Diffusion
Jan 15, 2025Most publicly accessible remote sensing data suffer from low resolution, limiting their practical applications. To address this, we propose a diffusion model guided by neural operators for continuous remote sensing image super-resolution (NeurOp-Diff). Neural operators are used to learn resolution representations at arbitrary scales, encoding low-resolution (LR) images into high-dimensional features, which are then used as prior conditions to guide the diffusion model for denoising. This effectively addresses the artifacts and excessive smoothing issues present in existing super-resolution (SR) methods, enabling the generation of high-quality, continuous super-resolution images. Specifically, we adjust the super-resolution scale by a scaling factor s, allowing the model to adapt to different super-resolution magnifications. Furthermore, experiments on multiple datasets demonstrate the effectiveness of NeurOp-Diff. Our code is available at https://github.com/zerono000/NeurOp-Diff.
Beyond Benchmarking: A New Paradigm for Evaluation and Assessment of Large Language Models
Jul 10, 2024

In current benchmarks for evaluating large language models (LLMs), there are issues such as evaluation content restriction, untimely updates, and lack of optimization guidance. In this paper, we propose a new paradigm for the measurement of LLMs: Benchmarking-Evaluation-Assessment. Our paradigm shifts the "location" of LLM evaluation from the "examination room" to the "hospital". Through conducting a "physical examination" on LLMs, it utilizes specific task-solving as the evaluation content, performs deep attribution of existing problems within LLMs, and provides recommendation for optimization.