 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAVPairs: A Challenging Benchmark for Match Pair Retrieval of Large-scale UAV Images
May 28, 2025
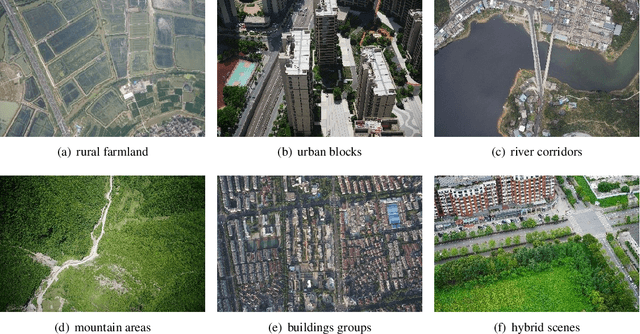
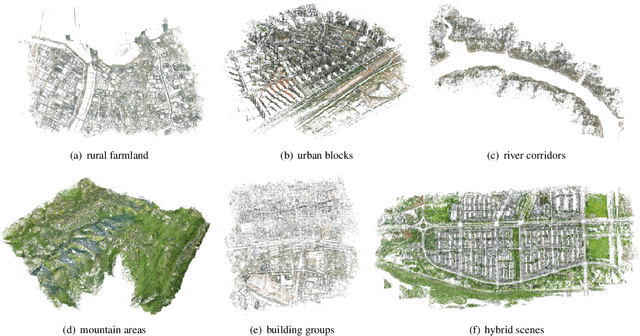

The primary contribution of this paper is a challenging benchmark dataset, UAVPairs, and a training pipeline designed for match pair retrieval of large-scale UAV images. First, the UAVPairs dataset, comprising 21,622 high-resolution images across 30 diverse scenes, is constructed; the 3D points and tracks generated by SfM-based 3D reconstruction are employed to define the geometric similarity of image pairs, ensuring genuinely matchable image pairs are used for training. Second, to solve the problem of expensive mining cost for global hard negative mining, a batched nontrivial sample mining strategy is proposed, leveraging the geometric similarity and multi-scene structure of the UAVPairs to generate training samples as to accelerate training. Third, recognizing the limitation of pair-based losses, the ranked list loss is designed to improve the discrimination of image retrieval models, which optimizes the global similarity structure constructed from the positive set and negative set. Finally, the effectiveness of the UAVPairs dataset and training pipeline is validated through comprehensive experiments on three distinct large-scale UAV datasets. The experiment results demonstrate that models trained with the UAVPairs dataset and the ranked list loss achieve significantly improved retrieval accuracy compared to models trained on existing datasets or with conventional losses. Furthermore, these improvements translate to enhanced view graph connectivity and higher quality of reconstructed 3D models. The models trained by the proposed approach perform more robustly compared with hand-crafted global features, particularly in challenging repetitively textured scenes and weakly textured scenes. For match pair retrieval of large-scale UAV images, the trained image retrieval models offer an effective solution. The dataset would be made publicly available at https://github.com/json87/UAVPairs.
Sat-DN: Implicit Surface Reconstruction from Multi-View Satellite Images with Depth and Normal Supervision
Feb 12, 2025



With advancements in satellite imaging technology, acquiring high-resolution multi-view satellite imagery has become increasingly accessible, enabling rapid and location-independent ground model reconstruction. However, traditional stereo matching methods struggle to capture fine details, and while neural radiance fields (NeRFs) achieve high-quality reconstructions, their training time is prohibitively long. Moreover, challenges such as low visibility of building facades, illumination and style differences between pixels, and weakly textured regions in satellite imagery further make it hard to reconstruct reasonable terrain geometry and detailed building facades. To address these issues, we propose Sat-DN, a novel framework leveraging a progressively trained multi-resolution hash grid reconstruction architecture with explicit depth guidance and surface normal consistency constraints to enhance reconstruction quality. The multi-resolution hash grid accelerates training, while the progressive strategy incrementally increases the learning frequency, using coarse low-frequency geometry to guide the reconstruction of fine high-frequency details. The depth and normal constraints ensure a clear building outline and correct planar distribution. Extensive experiments on the DFC2019 dataset demonstrate that Sat-DN outperforms existing methods, achieving state-of-the-art results in both qualitative and quantitative evaluations. The code is available at https://github.com/costune/SatDN.
Efficient Match Pair Retrieval for Large-scale UAV Images via Graph Indexed Global Descriptor
Jul 10, 2023



SfM (Structure from Motion) has been extensively used for UAV (Unmanned Aerial Vehicle) image orientation. Its efficiency is directly influenced by feature matching. Although image retrieval has been extensively used for match pair selection, high computational costs are consumed due to a large number of local features and the large size of the used codebook. Thus, this paper proposes an efficient match pair retrieval method and implements an integrated workflow for parallel SfM reconstruction. First, an individual codebook is trained online by considering the redundancy of UAV images and local features, which avoids the ambiguity of training codebooks from other datasets. Second, local features of each image are aggregated into a single high-dimension global descriptor through the VLAD (Vector of Locally Aggregated Descriptors) aggregation by using the trained codebook, which remarkably reduces the number of features and the burden of nearest neighbor searching in image indexing. Third, the global descriptors are indexed via the HNSW (Hierarchical Navigable Small World) based graph structure for the nearest neighbor searching. Match pairs are then retrieved by using an adaptive threshold selection strategy and utilized to create a view graph for divide-and-conquer based parallel SfM reconstruction. Finally, the performance of the proposed solution has been verified using three large-scale UAV datasets. The test results demonstrate that the proposed solution accelerates match pair retrieval with a speedup ratio ranging from 36 to 108 and improves the efficiency of SfM reconstruction with competitive accuracy in both relative and absolute orientation.