 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Two-Stage Lightweight Framework for Efficient Land-Air Bimodal Robot Autonomous Navigation
Jul 30, 2025Land-air bimodal robots (LABR) are gaining attention for autonomous navigation, combining high mobility from aerial vehicles with long endurance from ground vehicles. However, existing LABR navigation methods are limited by suboptimal trajectories from mapping-based approaches and the excessive computational demands of learning-based methods. To address this, we propose a two-stage lightweight framework that integrates global key points prediction with local trajectory refinement to generate efficient and reachable trajectories. In the first stage, the Global Key points Prediction Network (GKPN) was used to generate a hybrid land-air keypoint path. The GKPN includes a Sobel Perception Network (SPN) for improved obstacle detection and a Lightweight Attention Planning Network (LAPN) to improves predictive ability by capturing contextual information. In the second stage, the global path is segmented based on predicted key points and refined using a mapping-based planner to create smooth, collision-free trajectories. Experiments conducted on our LABR platform show that our framework reduces network parameters by 14\% and energy consumption during land-air transitions by 35\% compared to existing approaches. The framework achieves real-time navigation without GPU acceleration and enables zero-shot transfer from simulation to reality during
GO-FEAP: Global Optimal UAV Planner Using Frontier-Omission-Aware Exploration and Altitude-Stratified Planning
Oct 24, 2023Autonomous exploration is a fundamental problem for various applications of unmanned aerial vehicles(UAVs). Existing methods, however, are demonstrated to static local optima and two-dimensional exploration. To address these challenges, this paper introduces GO-FEAP (Global Optimal UAV Planner Using Frontier-Omission-Aware Exploration and Altitude-Stratified Planning), aiming to achieve efficient and complete three-dimensional exploration. Frontier-Omission-Aware Exploration module presented in this work takes into account multiple pivotal factors, encompassing frontier distance, nearby frontier count, frontier duration, and frontier categorization, for a comprehensive assessment of frontier importance. Furthermore, to tackle scenarios with substantial vertical variations, we introduce the Altitude-Stratified Planning strategy, which stratifies the three-dimensional space based on altitude, conducting global-local planning for each stratum. The objective of global planning is to identify the most optimal frontier for exploration, followed by viewpoint selection and local path optimization based on frontier type, ultimately generating dynamically feasible three-dimensional spatial exploration trajectories. We present extensive benchmark and real-world tests, in which our method completes the exploration tasks with unprecedented completeness compared to state-of-the-art approaches.
Optimized Views Photogrammetry: Precision Analysis and A Large-scale Case Study in Qingdao
Jun 24, 2022
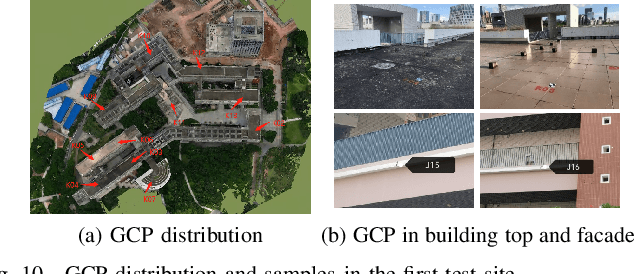

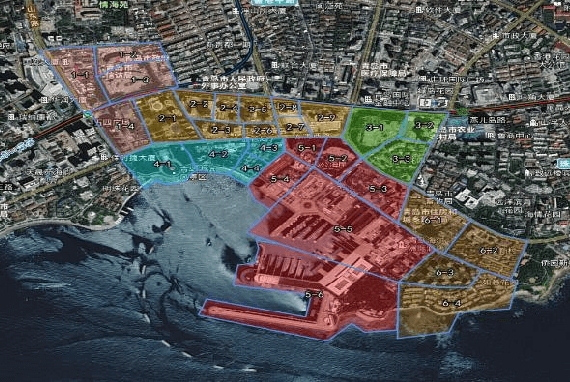
UAVs have become one of the widely used remote sensing platforms and played a critical role in the construction of smart cities. However, due to the complex environment in urban scenes, secure and accurate data acquisition brings great challenges to 3D modeling and scene updating. Optimal trajectory planning of UAVs and accurate data collection of onboard cameras are non-trivial issues in urban modeling. This study presents the principle of optimized views photogrammetry and verifies its precision and potential in large-scale 3D modeling. Different from oblique photogrammetry, optimized views photogrammetry uses rough models to generate and optimize UAV trajectories, which is achieved through the consideration of model point reconstructability and view point redundancy. Based on the principle of optimized views photogrammetry, this study first conducts a precision analysis of 3D models by using UAV images of optimized views photogrammetry and then executes a large-scale case study in the urban region of Qingdao city, China, to verify its engineering potential. By using GCPs for image orientation precision analysis and TLS (terrestrial laser scanning) point clouds for model quality analysis, experimental results show that optimized views photogrammetry could construct stable image connection networks and could achieve comparable image orientation accuracy. Benefiting from the accurate image acquisition strategy, the quality of mesh models significantly improves, especially for urban areas with serious occlusions, in which 3 to 5 times of higher accuracy has been achieved. Besides, the case study in Qingdao city verifies that optimized views photogrammetry can be a reliable and powerful solution for the large-scale 3D modeling in complex urban scenes.