 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk Map As Middleware: Towards Interpretable Cooperative End-to-end Autonomous Driving for Risk-Aware Planning
Aug 11, 2025End-to-end paradigm has emerged as a promising approach to autonomous driving. However, existing single-agent end-to-end pipelines are often constrained by occlusion and limited perception range, resulting in hazardous driving. Furthermore, their black-box nature prevents the interpretability of the driving behavior, leading to an untrustworthiness system. To address these limitations, we introduce Risk Map as Middleware (RiskMM) and propose an interpretable cooperative end-to-end driving framework. The risk map learns directly from the driving data and provides an interpretable spatiotemporal representation of the scenario from the upstream perception and the interactions between the ego vehicle and the surrounding environment for downstream planning. RiskMM first constructs a multi-agent spatiotemporal representation with unified Transformer-based architecture, then derives risk-aware representations by modeling interactions among surrounding environments with attention. These representations are subsequently fed into a learning-based Model Predictive Control (MPC) module. The MPC planner inherently accommodates physical constraints and different vehicle types and can provide interpretation by aligning learned parameters with explicit MPC elements. Evaluations conducted on the real-world V2XPnP-Seq dataset confirm that RiskMM achieves superior and robust performance in risk-aware trajectory planning, significantly enhancing the interpretability of the cooperative end-to-end driving framework. The codebase will be released to facilitate future research in this field.
V2XPnP: Vehicle-to-Everything Spatio-Temporal Fusion for Multi-Agent Perception and Prediction
Dec 02, 2024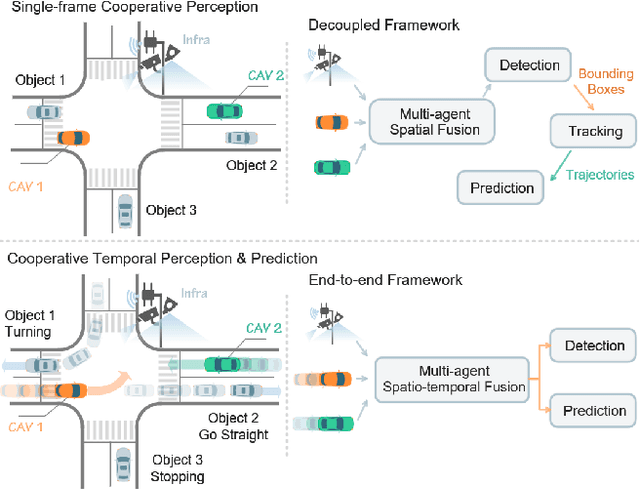
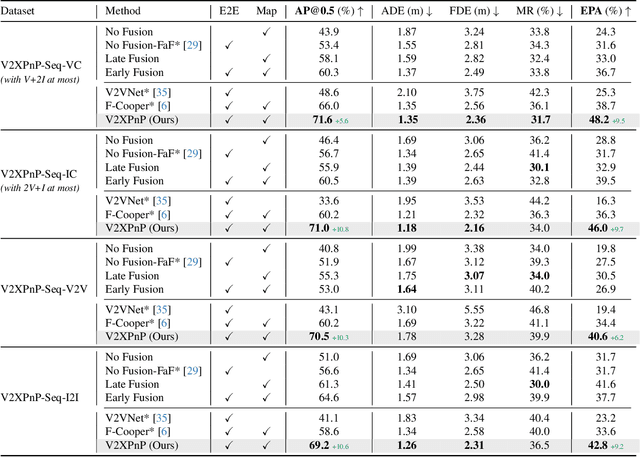
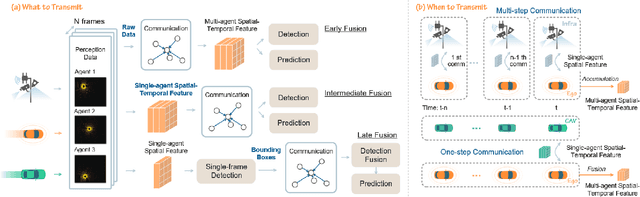
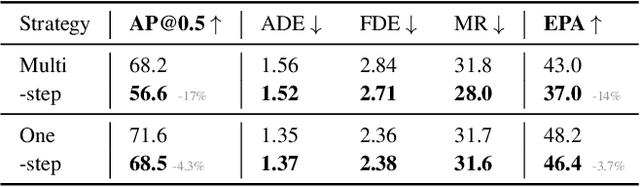
Vehicle-to-everything (V2X) technologies offer a promising paradigm to mitigate the limitations of constrained observability in single-vehicle systems. Prior work primarily focuses on single-frame cooperative perception, which fuses agents' information across different spatial locations but ignores temporal cues and temporal tasks (e.g., temporal perception and prediction). In this paper, we focus on temporal perception and prediction tasks in V2X scenarios and design one-step and multi-step communication strategies (when to transmit) as well as examine their integration with three fusion strategies - early, late, and intermediate (what to transmit), providing comprehensive benchmarks with various fusion models (how to fuse). Furthermore, we propose V2XPnP, a novel intermediate fusion framework within one-step communication for end-to-end perception and prediction. Our framework employs a unified Transformer-based architecture to effectively model complex spatiotemporal relationships across temporal per-frame, spatial per-agent, and high-definition map. Moreover, we introduce the V2XPnP Sequential Dataset that supports all V2X cooperation modes and addresses the limitations of existing real-world datasets, which are restricted to single-frame or single-mode cooperation. Extensive experiments demonstrate our framework outperforms state-of-the-art methods in both perception and prediction tasks.
Space Domain based Ecological Cooperative and Adaptive Cruise Control on Rolling Terrain
May 13, 2024Ecological Cooperative and Adaptive Cruise Control (Eco-CACC) is widely focused to enhance sustainability of CACC. However, state-of-the-art Eco-CACC studies are still facing challenges in adopting on rolling terrain. Furthermore, they cannot ensure both ecology optimality and computational efficiency. Hence, this paper proposes a nonlinear optimal control based Eco-CACC controller. It has the following features: i) enhancing performance across rolling terrains by modeling in space domain; ii) enhancing fuel efficiency via globally optimizing all vehicle's fuel consumptions; iii) ensuring computational efficiency by developing a differential dynamic programming-based solving method for the non-linear optimal control problem; iv) ensuring string stability through theoretically proving and experimentally validating. The performance of the proposed Eco-CACC controller was evaluated. Results showed that the proposed Eco-CACC controller can improve average fuel saving by 37.67% at collector road and about 17.30% at major arterial.
Accelerating the Evolution of Personalized Automated Lane Change through Lesson Learning
May 13, 2024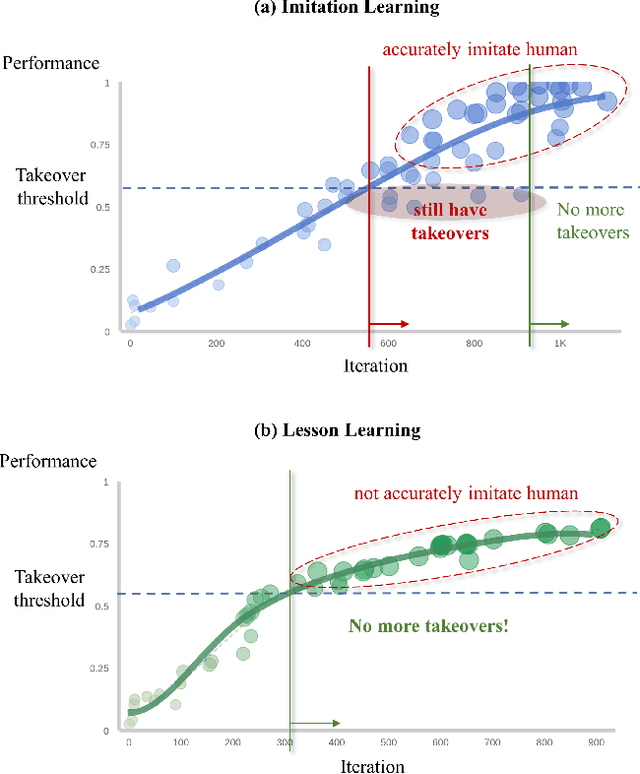
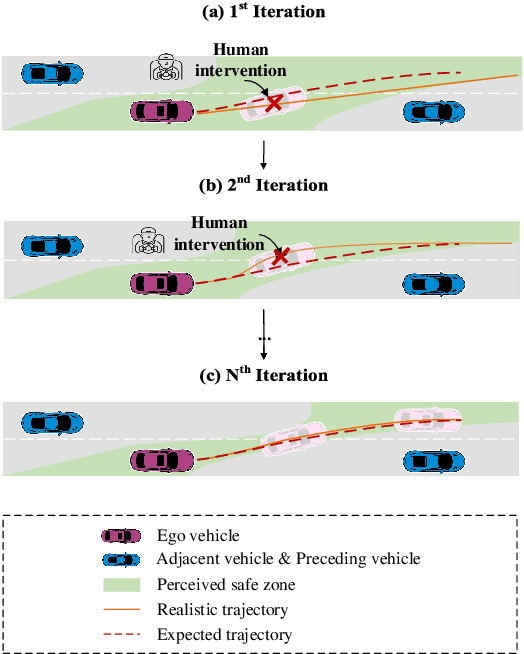
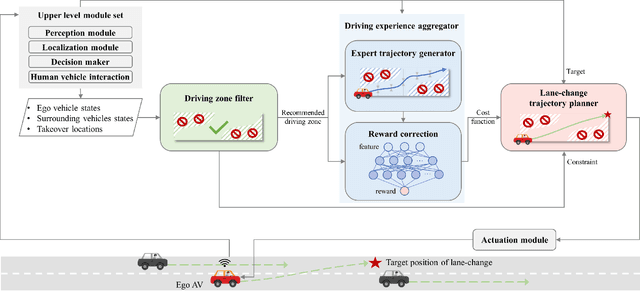
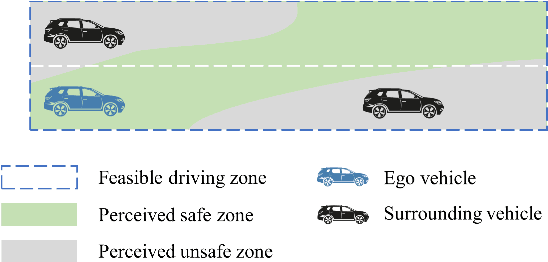
Personalization is crucial for the widespread adoption of advanced driver assistance system. To match up with each user's preference, the online evolution capability is a must. However, conventional evolution methods learn from naturalistic driving data, which requires a lot computing power and cannot be applied online. To address this challenge, this paper proposes a lesson learning approach: learning from driver's takeover interventions. By leveraging online takeover data, the driving zone is generated to ensure perceived safety using Gaussian discriminant analysis. Real-time corrections to trajectory planning rewards are enacted through apprenticeship learning. Guided by the objective of optimizing rewards within the constraints of the driving zone, this approach employs model predictive control for trajectory planning. This lesson learning framework is highlighted for its faster evolution capability, adeptness at experience accumulating, assurance of perceived safety, and computational efficiency. Simulation results demonstrate that the proposed system consistently achieves a successful customization without further takeover interventions. Accumulated experience yields a 24% enhancement in evolution efficiency. The average number of learning iterations is only 13.8. The average computation time is 0.08 seconds.
V2X-Real: a Largs-Scale Dataset for Vehicle-to-Everything Cooperative Perception
Mar 24, 2024Recent advancements in Vehicle-to-Everything (V2X) technologies have enabled autonomous vehicles to share sensing information to see through occlusions, greatly boosting the perception capability. However, there are no real-world datasets to facilitate the real V2X cooperative perception research -- existing datasets either only support Vehicle-to-Infrastructure cooperation or Vehicle-to-Vehicle cooperation. In this paper, we propose a dataset that has a mixture of multiple vehicles and smart infrastructure simultaneously to facilitate the V2X cooperative perception development with multi-modality sensing data. Our V2X-Real is collected using two connected automated vehicles and two smart infrastructures, which are all equipped with multi-modal sensors including LiDAR sensors and multi-view cameras. The whole dataset contains 33K LiDAR frames and 171K camera data with over 1.2M annotated bounding boxes of 10 categories in very challenging urban scenarios. According to the collaboration mode and ego perspective, we derive four types of datasets for Vehicle-Centric, Infrastructure-Centric, Vehicle-to-Vehicle, and Infrastructure-to-Infrastructure cooperative perception. Comprehensive multi-class multi-agent benchmarks of SOTA cooperative perception methods are provided. The V2X-Real dataset and benchmark codes will be released.