 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Fisheye-Compatible 3D Gaussian Splatting Methods on Real Images Beyond 180 Degree Field of View
Aug 09, 2025We present the first evaluation of fisheye-based 3D Gaussian Splatting methods, Fisheye-GS and 3DGUT, on real images with fields of view exceeding 180 degree. Our study covers both indoor and outdoor scenes captured with 200 degree fisheye cameras and analyzes how each method handles extreme distortion in real world settings. We evaluate performance under varying fields of view (200 degree, 160 degree, and 120 degree) to study the tradeoff between peripheral distortion and spatial coverage. Fisheye-GS benefits from field of view (FoV) reduction, particularly at 160 degree, while 3DGUT remains stable across all settings and maintains high perceptual quality at the full 200 degree view. To address the limitations of SfM-based initialization, which often fails under strong distortion, we also propose a depth-based strategy using UniK3D predictions from only 2-3 fisheye images per scene. Although UniK3D is not trained on real fisheye data, it produces dense point clouds that enable reconstruction quality on par with SfM, even in difficult scenes with fog, glare, or sky. Our results highlight the practical viability of fisheye-based 3DGS methods for wide-angle 3D reconstruction from sparse and distortion-heavy image inputs.
FIORD: A Fisheye Indoor-Outdoor Dataset with LIDAR Ground Truth for 3D Scene Reconstruction and Benchmarking
Apr 02, 2025The development of large-scale 3D scene reconstruction and novel view synthesis methods mostly rely on datasets comprising perspective images with narrow fields of view (FoV). While effective for small-scale scenes, these datasets require large image sets and extensive structure-from-motion (SfM) processing, limiting scalability. To address this, we introduce a fisheye image dataset tailored for scene reconstruction tasks. Using dual 200-degree fisheye lenses, our dataset provides full 360-degree coverage of 5 indoor and 5 outdoor scenes. Each scene has sparse SfM point clouds and precise LIDAR-derived dense point clouds that can be used as geometric ground-truth, enabling robust benchmarking under challenging conditions such as occlusions and reflections. While the baseline experiments focus on vanilla Gaussian Splatting and NeRF based Nerfacto methods, the dataset supports diverse approaches for scene reconstruction, novel view synthesis, and image-based rendering.
DeSplat: Decomposed Gaussian Splatting for Distractor-Free Rendering
Nov 29, 2024Gaussian splatting enables fast novel view synthesis in static 3D environments. However, reconstructing real-world environments remains challenging as distractors or occluders break the multi-view consistency assumption required for accurate 3D reconstruction. Most existing methods rely on external semantic information from pre-trained models, introducing additional computational overhead as pre-processing steps or during optimization. In this work, we propose a novel method, DeSplat, that directly separates distractors and static scene elements purely based on volume rendering of Gaussian primitives. We initialize Gaussians within each camera view for reconstructing the view-specific distractors to separately model the static 3D scene and distractors in the alpha compositing stages. DeSplat yields an explicit scene separation of static elements and distractors, achieving comparable results to prior distractor-free approaches without sacrificing rendering speed. We demonstrate DeSplat's effectiveness on three benchmark data sets for distractor-free novel view synthesis. See the project website at https://aaltoml.github.io/desplat/.
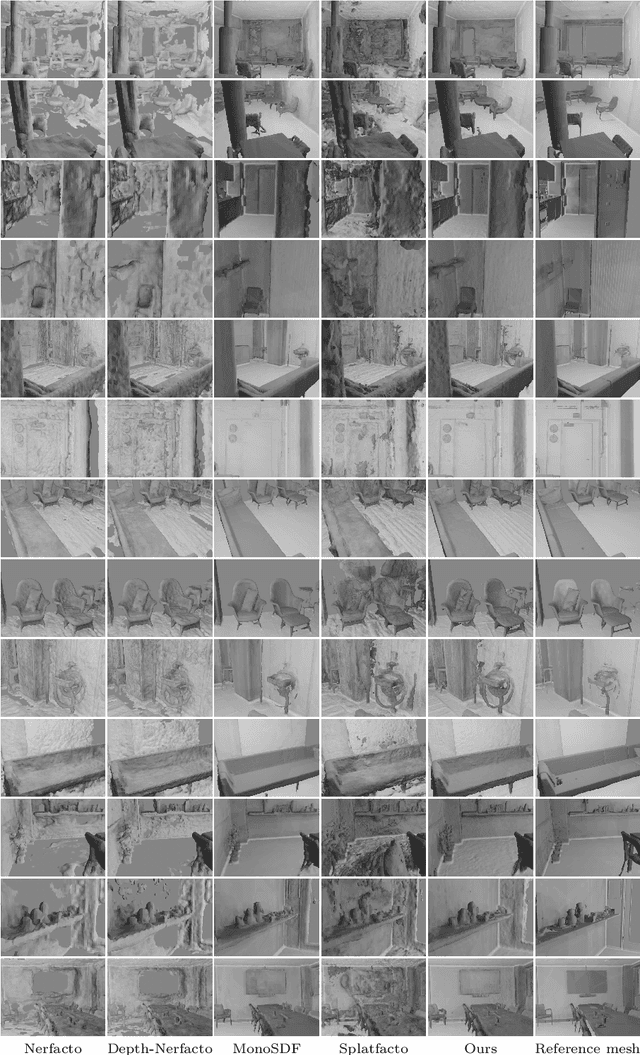
AGS-Mesh: Adaptive Gaussian Splatting and Meshing with Geometric Priors for Indoor Room Reconstruction Using Smartphones
Nov 28, 2024Geometric priors are often used to enhance 3D reconstruction. With many smartphones featuring low-resolution depth sensors and the prevalence of off-the-shelf monocular geometry estimators, incorporating geometric priors as regularization signals has become common in 3D vision tasks. However, the accuracy of depth estimates from mobile devices is typically poor for highly detailed geometry, and monocular estimators often suffer from poor multi-view consistency and precision. In this work, we propose an approach for joint surface depth and normal refinement of Gaussian Splatting methods for accurate 3D reconstruction of indoor scenes. We develop supervision strategies that adaptively filters low-quality depth and normal estimates by comparing the consistency of the priors during optimization. We mitigate regularization in regions where prior estimates have high uncertainty or ambiguities. Our filtering strategy and optimization design demonstrate significant improvements in both mesh estimation and novel-view synthesis for both 3D and 2D Gaussian Splatting-based methods on challenging indoor room datasets. Furthermore, we explore the use of alternative meshing strategies for finer geometry extraction. We develop a scale-aware meshing strategy inspired by TSDF and octree-based isosurface extraction, which recovers finer details from Gaussian models compared to other commonly used open-source meshing tools. Our code is released in https://xuqianren.github.io/ags_mesh_website/.
Gaussian Splatting in Mirrors: Reflection-Aware Rendering via Virtual Camera Optimization
Oct 02, 2024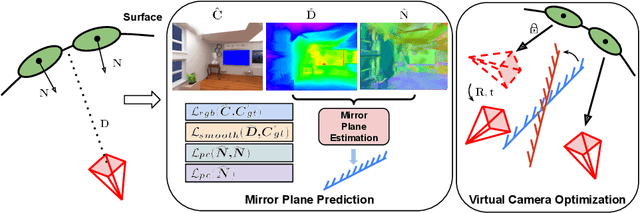
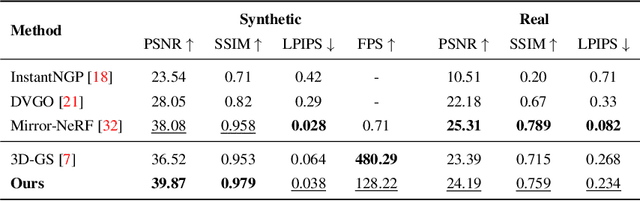
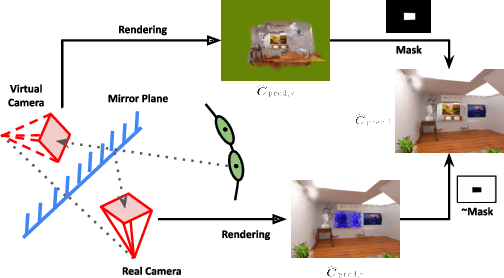

Recent advancements in 3D Gaussian Splatting (3D-GS) have revolutionized novel view synthesis, facilitating real-time, high-quality image rendering. However, in scenarios involving reflective surfaces, particularly mirrors, 3D-GS often misinterprets reflections as virtual spaces, resulting in blurred and inconsistent multi-view rendering within mirrors. Our paper presents a novel method aimed at obtaining high-quality multi-view consistent reflection rendering by modelling reflections as physically-based virtual cameras. We estimate mirror planes with depth and normal estimates from 3D-GS and define virtual cameras that are placed symmetrically about the mirror plane. These virtual cameras are then used to explain mirror reflections in the scene. To address imperfections in mirror plane estimates, we propose a straightforward yet effective virtual camera optimization method to enhance reflection quality. We collect a new mirror dataset including three real-world scenarios for more diverse evaluation. Experimental validation on both Mirror-Nerf and our real-world dataset demonstrate the efficacy of our approach. We achieve comparable or superior results while significantly reducing training time compared to previous state-of-the-art.
gsplat: An Open-Source Library for Gaussian Splatting
Sep 10, 2024gsplat is an open-source library designed for training and developing Gaussian Splatting methods. It features a front-end with Python bindings compatible with the PyTorch library and a back-end with highly optimized CUDA kernels. gsplat offers numerous features that enhance the optimization of Gaussian Splatting models, which include optimization improvements for speed, memory, and convergence times. Experimental results demonstrate that gsplat achieves up to 10% less training time and 4x less memory than the original implementation. Utilized in several research projects, gsplat is actively maintained on GitHub. Source code is available at https://github.com/nerfstudio-project/gsplat under Apache License 2.0. We welcome contributions from the open-source community.
DN-Splatter: Depth and Normal Priors for Gaussian Splatting and Meshing
Mar 26, 2024


3D Gaussian splatting, a novel differentiable rendering technique, has achieved state-of-the-art novel view synthesis results with high rendering speeds and relatively low training times. However, its performance on scenes commonly seen in indoor datasets is poor due to the lack of geometric constraints during optimization. We extend 3D Gaussian splatting with depth and normal cues to tackle challenging indoor datasets and showcase techniques for efficient mesh extraction, an important downstream application. Specifically, we regularize the optimization procedure with depth information, enforce local smoothness of nearby Gaussians, and use the geometry of the 3D Gaussians supervised by normal cues to achieve better alignment with the true scene geometry. We improve depth estimation and novel view synthesis results over baselines and show how this simple yet effective regularization technique can be used to directly extract meshes from the Gaussian representation yielding more physically accurate reconstructions on indoor scenes. Our code will be released in https://github.com/maturk/dn-splatter.
Gaussian Splatting on the Move: Blur and Rolling Shutter Compensation for Natural Camera Motion
Mar 20, 2024



High-quality scene reconstruction and novel view synthesis based on Gaussian Splatting (3DGS) typically require steady, high-quality photographs, often impractical to capture with handheld cameras. We present a method that adapts to camera motion and allows high-quality scene reconstruction with handheld video data suffering from motion blur and rolling shutter distortion. Our approach is based on detailed modelling of the physical image formation process and utilizes velocities estimated using visual-inertial odometry (VIO). Camera poses are considered non-static during the exposure time of a single image frame and camera poses are further optimized in the reconstruction process. We formulate a differentiable rendering pipeline that leverages screen space approximation to efficiently incorporate rolling-shutter and motion blur effects into the 3DGS framework. Our results with both synthetic and real data demonstrate superior performance in mitigating camera motion over existing methods, thereby advancing 3DGS in naturalistic settings.