 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
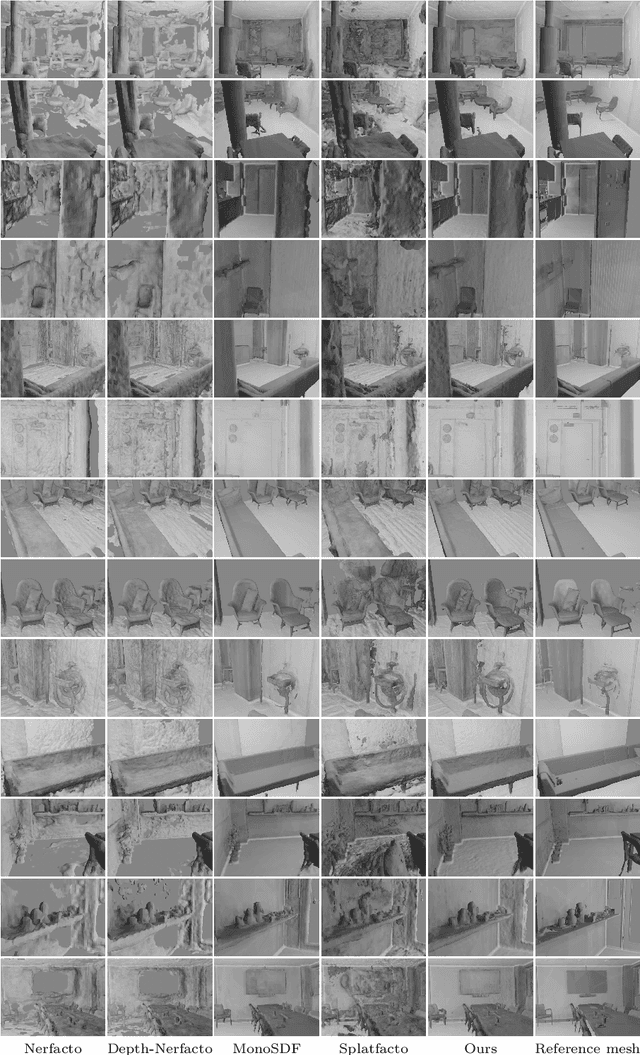
Add to EdgeAGS-Mesh: Adaptive Gaussian Splatting and Meshing with Geometric Priors for Indoor Room Reconstruction Using Smartphones
Nov 28, 2024Geometric priors are often used to enhance 3D reconstruction. With many smartphones featuring low-resolution depth sensors and the prevalence of off-the-shelf monocular geometry estimators, incorporating geometric priors as regularization signals has become common in 3D vision tasks. However, the accuracy of depth estimates from mobile devices is typically poor for highly detailed geometry, and monocular estimators often suffer from poor multi-view consistency and precision. In this work, we propose an approach for joint surface depth and normal refinement of Gaussian Splatting methods for accurate 3D reconstruction of indoor scenes. We develop supervision strategies that adaptively filters low-quality depth and normal estimates by comparing the consistency of the priors during optimization. We mitigate regularization in regions where prior estimates have high uncertainty or ambiguities. Our filtering strategy and optimization design demonstrate significant improvements in both mesh estimation and novel-view synthesis for both 3D and 2D Gaussian Splatting-based methods on challenging indoor room datasets. Furthermore, we explore the use of alternative meshing strategies for finer geometry extraction. We develop a scale-aware meshing strategy inspired by TSDF and octree-based isosurface extraction, which recovers finer details from Gaussian models compared to other commonly used open-source meshing tools. Our code is released in https://xuqianren.github.io/ags_mesh_website/.
gsplat: An Open-Source Library for Gaussian Splatting
Sep 10, 2024gsplat is an open-source library designed for training and developing Gaussian Splatting methods. It features a front-end with Python bindings compatible with the PyTorch library and a back-end with highly optimized CUDA kernels. gsplat offers numerous features that enhance the optimization of Gaussian Splatting models, which include optimization improvements for speed, memory, and convergence times. Experimental results demonstrate that gsplat achieves up to 10% less training time and 4x less memory than the original implementation. Utilized in several research projects, gsplat is actively maintained on GitHub. Source code is available at https://github.com/nerfstudio-project/gsplat under Apache License 2.0. We welcome contributions from the open-source community.
DN-Splatter: Depth and Normal Priors for Gaussian Splatting and Meshing
Mar 26, 2024


3D Gaussian splatting, a novel differentiable rendering technique, has achieved state-of-the-art novel view synthesis results with high rendering speeds and relatively low training times. However, its performance on scenes commonly seen in indoor datasets is poor due to the lack of geometric constraints during optimization. We extend 3D Gaussian splatting with depth and normal cues to tackle challenging indoor datasets and showcase techniques for efficient mesh extraction, an important downstream application. Specifically, we regularize the optimization procedure with depth information, enforce local smoothness of nearby Gaussians, and use the geometry of the 3D Gaussians supervised by normal cues to achieve better alignment with the true scene geometry. We improve depth estimation and novel view synthesis results over baselines and show how this simple yet effective regularization technique can be used to directly extract meshes from the Gaussian representation yielding more physically accurate reconstructions on indoor scenes. Our code will be released in https://github.com/maturk/dn-splatter.
Gaussian Splatting on the Move: Blur and Rolling Shutter Compensation for Natural Camera Motion
Mar 20, 2024



High-quality scene reconstruction and novel view synthesis based on Gaussian Splatting (3DGS) typically require steady, high-quality photographs, often impractical to capture with handheld cameras. We present a method that adapts to camera motion and allows high-quality scene reconstruction with handheld video data suffering from motion blur and rolling shutter distortion. Our approach is based on detailed modelling of the physical image formation process and utilizes velocities estimated using visual-inertial odometry (VIO). Camera poses are considered non-static during the exposure time of a single image frame and camera poses are further optimized in the reconstruction process. We formulate a differentiable rendering pipeline that leverages screen space approximation to efficiently incorporate rolling-shutter and motion blur effects into the 3DGS framework. Our results with both synthetic and real data demonstrate superior performance in mitigating camera motion over existing methods, thereby advancing 3DGS in naturalistic settings.
HybVIO: Pushing the Limits of Real-time Visual-inertial Odometry
Jun 22, 2021
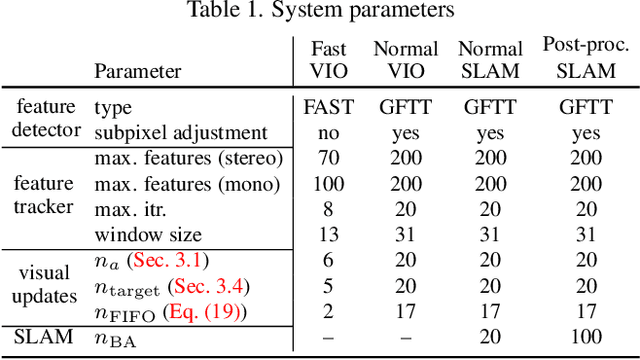

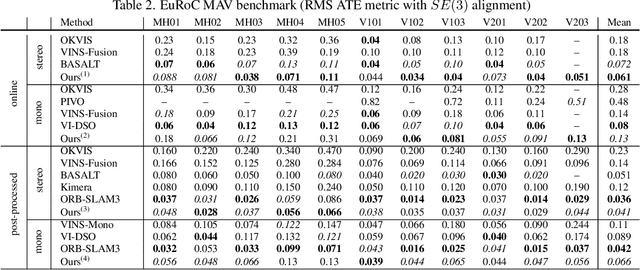
We present HybVIO, a novel hybrid approach for combining filtering-based visual-inertial odometry (VIO) with optimization-based SLAM. The core of our method is highly robust, independent VIO with improved IMU bias modeling, outlier rejection, stationarity detection, and feature track selection, which is adjustable to run on embedded hardware. Long-term consistency is achieved with a loosely-coupled SLAM module. In academic benchmarks, our solution yields excellent performance in all categories, especially in the real-time use case, where we outperform the current state-of-the-art. We also demonstrate the feasibility of VIO for vehicular tracking on consumer-grade hardware using a custom dataset, and show good performance in comparison to current commercial VISLAM alternatives.