 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Splatting on the Move: Blur and Rolling Shutter Compensation for Natural Camera Motion
Mar 20, 2024



High-quality scene reconstruction and novel view synthesis based on Gaussian Splatting (3DGS) typically require steady, high-quality photographs, often impractical to capture with handheld cameras. We present a method that adapts to camera motion and allows high-quality scene reconstruction with handheld video data suffering from motion blur and rolling shutter distortion. Our approach is based on detailed modelling of the physical image formation process and utilizes velocities estimated using visual-inertial odometry (VIO). Camera poses are considered non-static during the exposure time of a single image frame and camera poses are further optimized in the reconstruction process. We formulate a differentiable rendering pipeline that leverages screen space approximation to efficiently incorporate rolling-shutter and motion blur effects into the 3DGS framework. Our results with both synthetic and real data demonstrate superior performance in mitigating camera motion over existing methods, thereby advancing 3DGS in naturalistic settings.
HybVIO: Pushing the Limits of Real-time Visual-inertial Odometry
Jun 22, 2021
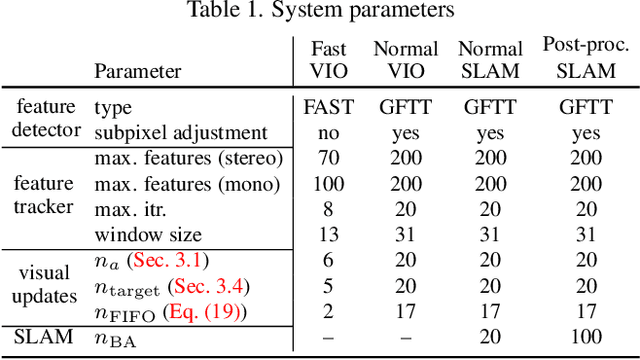

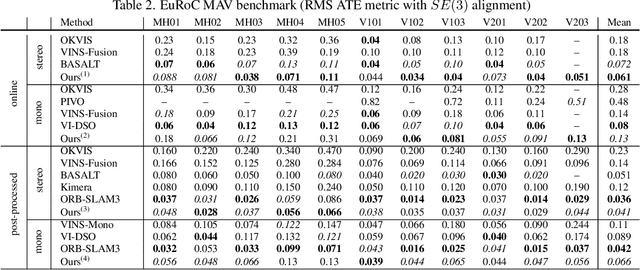
We present HybVIO, a novel hybrid approach for combining filtering-based visual-inertial odometry (VIO) with optimization-based SLAM. The core of our method is highly robust, independent VIO with improved IMU bias modeling, outlier rejection, stationarity detection, and feature track selection, which is adjustable to run on embedded hardware. Long-term consistency is achieved with a loosely-coupled SLAM module. In academic benchmarks, our solution yields excellent performance in all categories, especially in the real-time use case, where we outperform the current state-of-the-art. We also demonstrate the feasibility of VIO for vehicular tracking on consumer-grade hardware using a custom dataset, and show good performance in comparison to current commercial VISLAM alternatives.