 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric GNNs for Charged Particle Tracking at GlueX
May 28, 2025Nuclear physics experiments are aimed at uncovering the fundamental building blocks of matter. The experiments involve high-energy collisions that produce complex events with many particle trajectories. Tracking charged particles resulting from collisions in the presence of a strong magnetic field is critical to enable the reconstruction of particle trajectories and precise determination of interactions. It is traditionally achieved through combinatorial approaches that scale worse than linearly as the number of hits grows. Since particle hit data naturally form a 3-dimensional point cloud and can be structured as graphs, Graph Neural Networks (GNNs) emerge as an intuitive and effective choice for this task. In this study, we evaluate the GNN model for track finding on the data from the GlueX experiment at Jefferson Lab. We use simulation data to train the model and test on both simulation and real GlueX measurements. We demonstrate that GNN-based track finding outperforms the currently used traditional method at GlueX in terms of segment-based efficiency at a fixed purity while providing faster inferences. We show that the GNN model can achieve significant speedup by processing multiple events in batches, which exploits the parallel computation capability of Graphical Processing Units (GPUs). Finally, we compare the GNN implementation on GPU and FPGA and describe the trade-off.
Outlook Towards Deployable Continual Learning for Particle Accelerators
Apr 04, 2025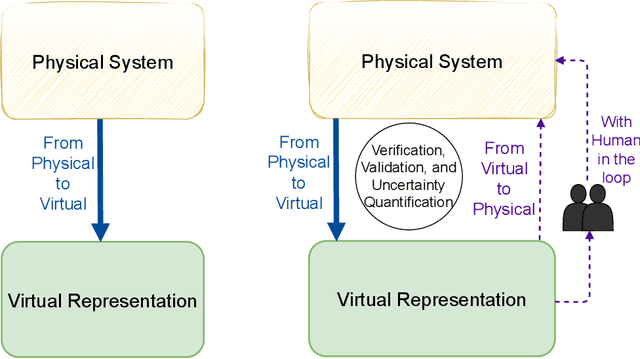
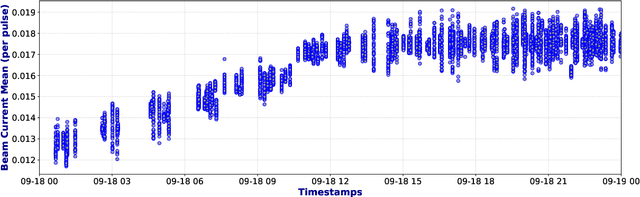
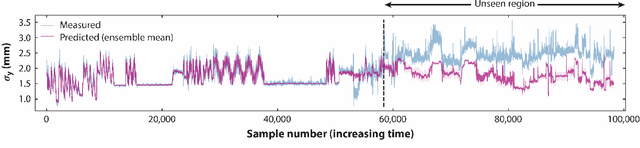
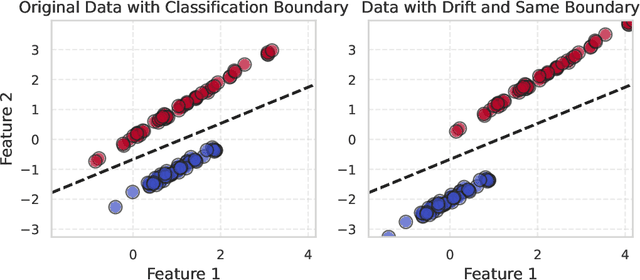
Particle Accelerators are high power complex machines. To ensure uninterrupted operation of these machines, thousands of pieces of equipment need to be synchronized, which requires addressing many challenges including design, optimization and control, anomaly detection and machine protection. With recent advancements, Machine Learning (ML) holds promise to assist in more advance prognostics, optimization, and control. While ML based solutions have been developed for several applications in particle accelerators, only few have reached deployment and even fewer to long term usage, due to particle accelerator data distribution drifts caused by changes in both measurable and non-measurable parameters. In this paper, we identify some of the key areas within particle accelerators where continual learning can allow maintenance of ML model performance with distribution drifts. Particularly, we first discuss existing applications of ML in particle accelerators, and their limitations due to distribution drift. Next, we review existing continual learning techniques and investigate their potential applications to address data distribution drifts in accelerators. By identifying the opportunities and challenges in applying continual learning, this paper seeks to open up the new field and inspire more research efforts towards deployable continual learning for particle accelerators.
Harnessing the Power of Gradient-Based Simulations for Multi-Objective Optimization in Particle Accelerators
Nov 07, 2024
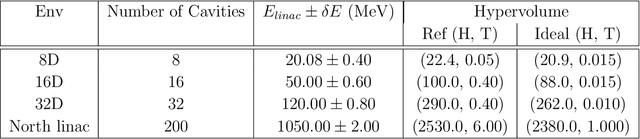
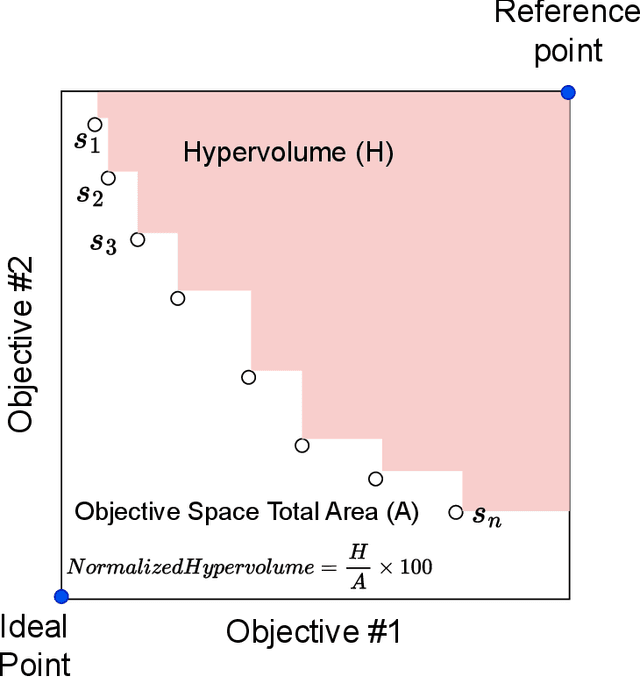

Particle accelerator operation requires simultaneous optimization of multiple objectives. Multi-Objective Optimization (MOO) is particularly challenging due to trade-offs between the objectives. Evolutionary algorithms, such as genetic algorithm (GA), have been leveraged for many optimization problems, however, they do not apply to complex control problems by design. This paper demonstrates the power of differentiability for solving MOO problems using a Deep Differentiable Reinforcement Learning (DDRL) algorithm in particle accelerators. We compare DDRL algorithm with Model Free Reinforcement Learning (MFRL), GA and Bayesian Optimization (BO) for simultaneous optimization of heat load and trip rates in the Continuous Electron Beam Accelerator Facility (CEBAF). The underlying problem enforces strict constraints on both individual states and actions as well as cumulative (global) constraint for energy requirements of the beam. A physics-based surrogate model based on real data is developed. This surrogate model is differentiable and allows back-propagation of gradients. The results are evaluated in the form of a Pareto-front for two objectives. We show that the DDRL outperforms MFRL, BO, and GA on high dimensional problems.
Semi-Supervised Learning of Dynamical Systems with Neural Ordinary Differential Equations: A Teacher-Student Model Approach
Oct 19, 2023Modeling dynamical systems is crucial for a wide range of tasks, but it remains challenging due to complex nonlinear dynamics, limited observations, or lack of prior knowledge. Recently, data-driven approaches such as Neural Ordinary Differential Equations (NODE) have shown promising results by leveraging the expressive power of neural networks to model unknown dynamics. However, these approaches often suffer from limited labeled training data, leading to poor generalization and suboptimal predictions. On the other hand, semi-supervised algorithms can utilize abundant unlabeled data and have demonstrated good performance in classification and regression tasks. We propose TS-NODE, the first semi-supervised approach to modeling dynamical systems with NODE. TS-NODE explores cheaply generated synthetic pseudo rollouts to broaden exploration in the state space and to tackle the challenges brought by lack of ground-truth system data under a teacher-student model. TS-NODE employs an unified optimization framework that corrects the teacher model based on the student's feedback while mitigating the potential false system dynamics present in pseudo rollouts. TS-NODE demonstrates significant performance improvements over a baseline Neural ODE model on multiple dynamical system modeling tasks.
Uncertainty Aware Deep Learning for Particle Accelerators
Sep 25, 2023

Standard deep learning models for classification and regression applications are ideal for capturing complex system dynamics. However, their predictions can be arbitrarily inaccurate when the input samples are not similar to the training data. Implementation of distance aware uncertainty estimation can be used to detect these scenarios and provide a level of confidence associated with their predictions. In this paper, we present results from using Deep Gaussian Process Approximation (DGPA) methods for errant beam prediction at Spallation Neutron Source (SNS) accelerator (classification) and we provide an uncertainty aware surrogate model for the Fermi National Accelerator Lab (FNAL) Booster Accelerator Complex (regression).
Extreme Risk Mitigation in Reinforcement Learning using Extreme Value Theory
Aug 24, 2023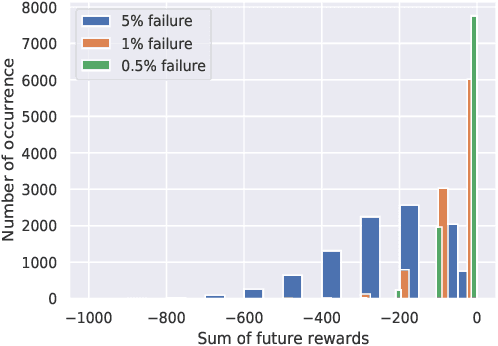



Risk-sensitive reinforcement learning (RL) has garnered significant attention in recent years due to the growing interest in deploying RL agents in real-world scenarios. A critical aspect of risk awareness involves modeling highly rare risk events (rewards) that could potentially lead to catastrophic outcomes. These infrequent occurrences present a formidable challenge for data-driven methods aiming to capture such risky events accurately. While risk-aware RL techniques do exist, their level of risk aversion heavily relies on the precision of the state-action value function estimation when modeling these rare occurrences. Our work proposes to enhance the resilience of RL agents when faced with very rare and risky events by focusing on refining the predictions of the extreme values predicted by the state-action value function distribution. To achieve this, we formulate the extreme values of the state-action value function distribution as parameterized distributions, drawing inspiration from the principles of extreme value theory (EVT). This approach effectively addresses the issue of infrequent occurrence by leveraging EVT-based parameterization. Importantly, we theoretically demonstrate the advantages of employing these parameterized distributions in contrast to other risk-averse algorithms. Our evaluations show that the proposed method outperforms other risk averse RL algorithms on a diverse range of benchmark tasks, each encompassing distinct risk scenarios.
A comparison of machine learning surrogate models of street-scale flooding in Norfolk, Virginia
Jul 26, 2023Low-lying coastal cities, exemplified by Norfolk, Virginia, face the challenge of street flooding caused by rainfall and tides, which strain transportation and sewer systems and can lead to property damage. While high-fidelity, physics-based simulations provide accurate predictions of urban pluvial flooding, their computational complexity renders them unsuitable for real-time applications. Using data from Norfolk rainfall events between 2016 and 2018, this study compares the performance of a previous surrogate model based on a random forest algorithm with two deep learning models: Long Short-Term Memory (LSTM) and Gated Recurrent Unit (GRU). This investigation underscores the importance of using a model architecture that supports the communication of prediction uncertainty and the effective integration of relevant, multi-modal features.
Distance Preserving Machine Learning for Uncertainty Aware Accelerator Capacitance Predictions
Jul 05, 2023Providing accurate uncertainty estimations is essential for producing reliable machine learning models, especially in safety-critical applications such as accelerator systems. Gaussian process models are generally regarded as the gold standard method for this task, but they can struggle with large, high-dimensional datasets. Combining deep neural networks with Gaussian process approximation techniques have shown promising results, but dimensionality reduction through standard deep neural network layers is not guaranteed to maintain the distance information necessary for Gaussian process models. We build on previous work by comparing the use of the singular value decomposition against a spectral-normalized dense layer as a feature extractor for a deep neural Gaussian process approximation model and apply it to a capacitance prediction problem for the High Voltage Converter Modulators in the Oak Ridge Spallation Neutron Source. Our model shows improved distance preservation and predicts in-distribution capacitance values with less than 1% error.
Multi-module based CVAE to predict HVCM faults in the SNS accelerator
Apr 20, 2023



We present a multi-module framework based on Conditional Variational Autoencoder (CVAE) to detect anomalies in the power signals coming from multiple High Voltage Converter Modulators (HVCMs). We condition the model with the specific modulator type to capture different representations of the normal waveforms and to improve the sensitivity of the model to identify a specific type of fault when we have limited samples for a given module type. We studied several neural network (NN) architectures for our CVAE model and evaluated the model performance by looking at their loss landscape for stability and generalization. Our results for the Spallation Neutron Source (SNS) experimental data show that the trained model generalizes well to detecting multiple fault types for several HVCM module types. The results of this study can be used to improve the HVCM reliability and overall SNS uptime
Artificial Intelligence and Machine Learning in Nuclear Physics
Dec 04, 2021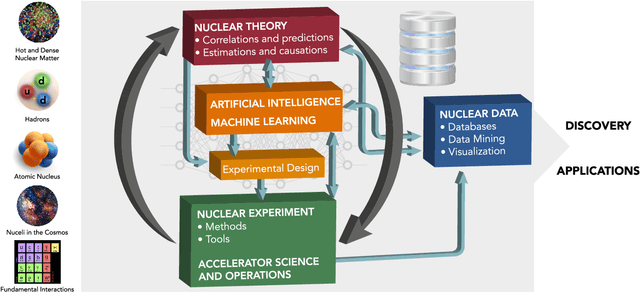
Advances in artificial intelligence/machine learning methods provide tools that have broad applicability in scientific research. These techniques are being applied across the diversity of nuclear physics research topics, leading to advances that will facilitate scientific discoveries and societal applications. This Review gives a snapshot of nuclear physics research which has been transformed by artificial intelligence and machine learning techniques.