 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoTexDensifier: Geometry-Texture-Aware Densification for High-Quality Photorealistic 3D Gaussian Splatting
Dec 22, 2024



3D Gaussian Splatting (3DGS) has recently attracted wide attentions in various areas such as 3D navigation, Virtual Reality (VR) and 3D simulation, due to its photorealistic and efficient rendering performance. High-quality reconstrution of 3DGS relies on sufficient splats and a reasonable distribution of these splats to fit real geometric surface and texture details, which turns out to be a challenging problem. We present GeoTexDensifier, a novel geometry-texture-aware densification strategy to reconstruct high-quality Gaussian splats which better comply with the geometric structure and texture richness of the scene. Specifically, our GeoTexDensifier framework carries out an auxiliary texture-aware densification method to produce a denser distribution of splats in fully textured areas, while keeping sparsity in low-texture regions to maintain the quality of Gaussian point cloud. Meanwhile, a geometry-aware splitting strategy takes depth and normal priors to guide the splitting sampling and filter out the noisy splats whose initial positions are far from the actual geometric surfaces they aim to fit, under a Validation of Depth Ratio Change checking. With the help of relative monocular depth prior, such geometry-aware validation can effectively reduce the influence of scattered Gaussians to the final rendering quality, especially in regions with weak textures or without sufficient training views. The texture-aware densification and geometry-aware splitting strategies are fully combined to obtain a set of high-quality Gaussian splats. We experiment our GeoTexDensifier framework on various datasets and compare our Novel View Synthesis results to other state-of-the-art 3DGS approaches, with detailed quantitative and qualitative evaluations to demonstrate the effectiveness of our method in producing more photorealistic 3DGS models.
Quadratic Gaussian Splatting for Efficient and Detailed Surface Reconstruction
Nov 25, 2024



Recently, 3D Gaussian Splatting (3DGS) has attracted attention for its superior rendering quality and speed over Neural Radiance Fields (NeRF). To address 3DGS's limitations in surface representation, 2D Gaussian Splatting (2DGS) introduced disks as scene primitives to model and reconstruct geometries from multi-view images, offering view-consistent geometry. However, the disk's first-order linear approximation often leads to over-smoothed results. We propose Quadratic Gaussian Splatting (QGS), a novel method that replaces disks with quadric surfaces, enhancing geometric fitting, whose code will be open-sourced. QGS defines Gaussian distributions in non-Euclidean space, allowing primitives to capture more complex textures. As a second-order surface approximation, QGS also renders spatial curvature to guide the normal consistency term, to effectively reduce over-smoothing. Moreover, QGS is a generalized version of 2DGS that achieves more accurate and detailed reconstructions, as verified by experiments on DTU and TNT, demonstrating its effectiveness in surpassing current state-of-the-art methods in geometry reconstruction. Our code willbe released as open source.
LiVisSfM: Accurate and Robust Structure-from-Motion with LiDAR and Visual Cues
Oct 29, 2024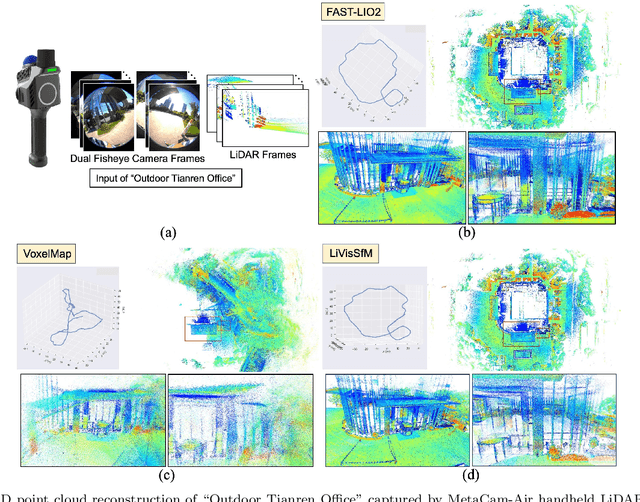

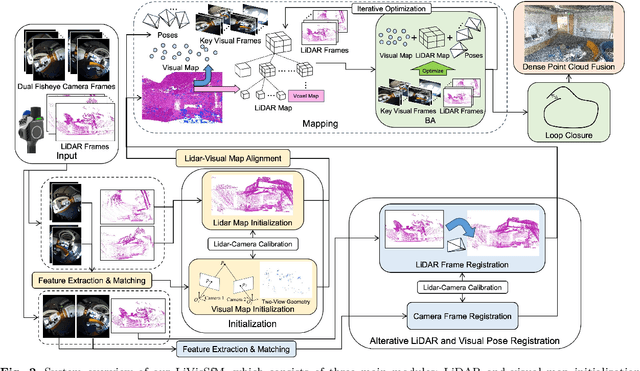

This paper presents an accurate and robust Structure-from-Motion (SfM) pipeline named LiVisSfM, which is an SfM-based reconstruction system that fully combines LiDAR and visual cues. Unlike most existing LiDAR-inertial odometry (LIO) and LiDAR-inertial-visual odometry (LIVO) methods relying heavily on LiDAR registration coupled with Inertial Measurement Unit (IMU), we propose a LiDAR-visual SfM method which innovatively carries out LiDAR frame registration to LiDAR voxel map in a Point-to-Gaussian residual metrics, combined with a LiDAR-visual BA and explicit loop closure in a bundle optimization way to achieve accurate and robust LiDAR pose estimation without dependence on IMU incorporation. Besides, we propose an incremental voxel updating strategy for efficient voxel map updating during the process of LiDAR frame registration and LiDAR-visual BA optimization. Experiments demonstrate the superior effectiveness of our LiVisSfM framework over state-of-the-art LIO and LIVO works on more accurate and robust LiDAR pose recovery and dense point cloud reconstruction of both public KITTI benchmark and a variety of self-captured dataset.
MetaGPT: Meta Programming for Multi-Agent Collaborative Framework
Aug 17, 2023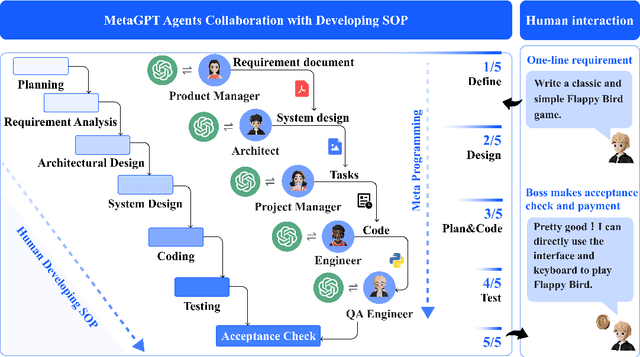
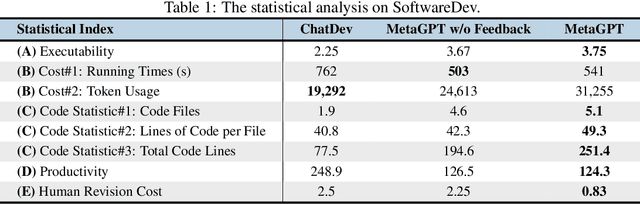
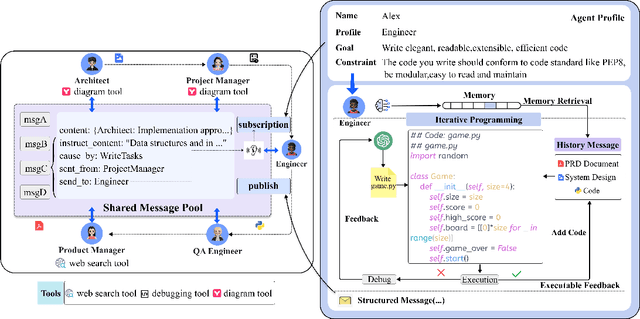
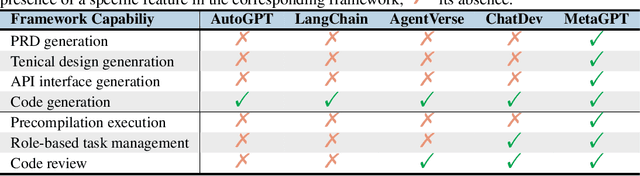
Recently, remarkable progress has been made in automated task-solving through the use of multi-agent driven by large language models (LLMs). However, existing LLM-based multi-agent works primarily focus on solving simple dialogue tasks, and complex tasks are rarely studied, mainly due to the LLM hallucination problem. This type of hallucination becomes cascading when naively chaining multiple intelligent agents, resulting in a failure to effectively address complex problems. Therefore, we introduce MetaGPT, an innovative framework that incorporates efficient human workflows as a meta programming approach into LLM-based multi-agent collaboration. Specifically, MetaGPT encodes Standardized Operating Procedures (SOPs) into prompts to enhance structured coordination. Subsequently, it mandates modular outputs, empowering agents with domain expertise comparable to human professionals, to validate outputs and minimize compounded errors. In this way, MetaGPT leverages the assembly line paradigm to assign diverse roles to various agents, thereby establishing a framework that can effectively and cohesively deconstruct complex multi-agent collaborative problems. Our experiments on collaborative software engineering benchmarks demonstrate that MetaGPT generates more coherent and correct solutions compared to existing chat-based multi-agent systems. This highlights the potential of integrating human domain knowledge into multi-agent systems, thereby creating new opportunities to tackle complex real-world challenges. The GitHub repository of this project is publicly available on:https://github.com/geekan/MetaGPT.
Human-in-the-Loop Schema Induction
Feb 25, 2023Schema induction builds a graph representation explaining how events unfold in a scenario. Existing approaches have been based on information retrieval (IR) and information extraction(IE), often with limited human curation. We demonstrate a human-in-the-loop schema induction system powered by GPT-3. We first describe the different modules of our system, including prompting to generate schematic elements, manual edit of those elements, and conversion of those into a schema graph. By qualitatively comparing our system to previous ones, we show that our system not only transfers to new domains more easily than previous approaches, but also reduces efforts of human curation thanks to our interactive interface.