 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiVisSfM: Accurate and Robust Structure-from-Motion with LiDAR and Visual Cues
Oct 29, 2024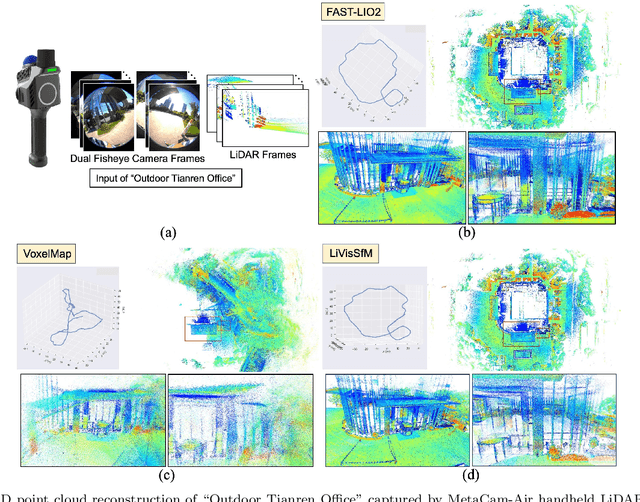

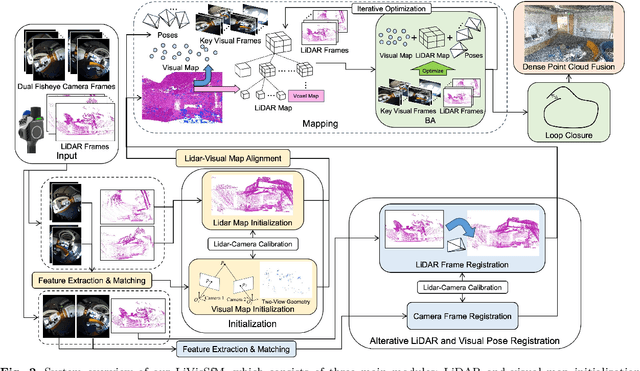

This paper presents an accurate and robust Structure-from-Motion (SfM) pipeline named LiVisSfM, which is an SfM-based reconstruction system that fully combines LiDAR and visual cues. Unlike most existing LiDAR-inertial odometry (LIO) and LiDAR-inertial-visual odometry (LIVO) methods relying heavily on LiDAR registration coupled with Inertial Measurement Unit (IMU), we propose a LiDAR-visual SfM method which innovatively carries out LiDAR frame registration to LiDAR voxel map in a Point-to-Gaussian residual metrics, combined with a LiDAR-visual BA and explicit loop closure in a bundle optimization way to achieve accurate and robust LiDAR pose estimation without dependence on IMU incorporation. Besides, we propose an incremental voxel updating strategy for efficient voxel map updating during the process of LiDAR frame registration and LiDAR-visual BA optimization. Experiments demonstrate the superior effectiveness of our LiVisSfM framework over state-of-the-art LIO and LIVO works on more accurate and robust LiDAR pose recovery and dense point cloud reconstruction of both public KITTI benchmark and a variety of self-captured dataset.
Depth Completion with Multiple Balanced Bases and Confidence for Dense Monocular SLAM
Sep 20, 2023Dense SLAM based on monocular cameras does indeed have immense application value in the field of AR/VR, especially when it is performed on a mobile device. In this paper, we propose a novel method that integrates a light-weight depth completion network into a sparse SLAM system using a multi-basis depth representation, so that dense mapping can be performed online even on a mobile phone. Specifically, we present a specifically optimized multi-basis depth completion network, called BBC-Net, tailored to the characteristics of traditional sparse SLAM systems. BBC-Net can predict multiple balanced bases and a confidence map from a monocular image with sparse points generated by off-the-shelf keypoint-based SLAM systems. The final depth is a linear combination of predicted depth bases that can be optimized by tuning the corresponding weights. To seamlessly incorporate the weights into traditional SLAM optimization and ensure efficiency and robustness, we design a set of depth weight factors, which makes our network a versatile plug-in module, facilitating easy integration into various existing sparse SLAM systems and significantly enhancing global depth consistency through bundle adjustment. To verify the portability of our method, we integrate BBC-Net into two representative SLAM systems. The experimental results on various datasets show that the proposed method achieves better performance in monocular dense mapping than the state-of-the-art methods. We provide an online demo running on a mobile phone, which verifies the efficiency and mapping quality of the proposed method in real-world scenarios.