 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWan-Animate: Unified Character Animation and Replacement with Holistic Replication
Sep 17, 2025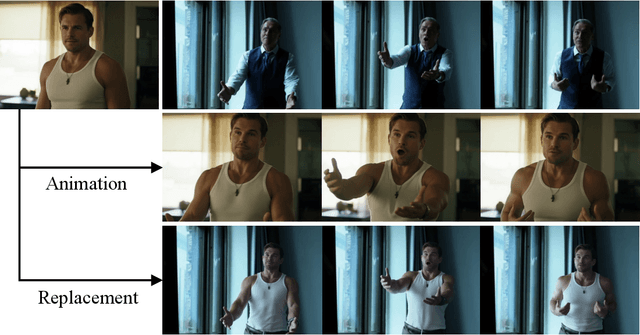
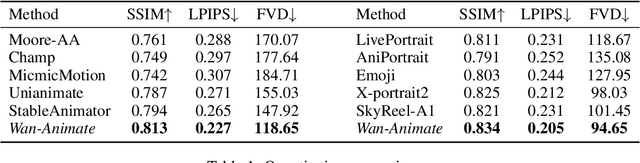
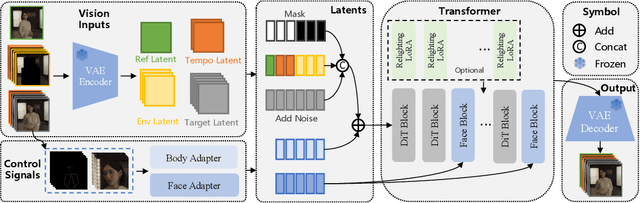
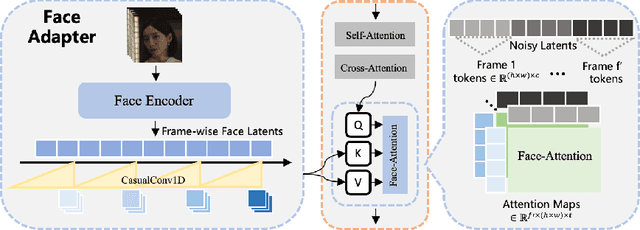
We introduce Wan-Animate, a unified framework for character animation and replacement. Given a character image and a reference video, Wan-Animate can animate the character by precisely replicating the expressions and movements of the character in the video to generate high-fidelity character videos. Alternatively, it can integrate the animated character into the reference video to replace the original character, replicating the scene's lighting and color tone to achieve seamless environmental integration. Wan-Animate is built upon the Wan model. To adapt it for character animation tasks, we employ a modified input paradigm to differentiate between reference conditions and regions for generation. This design unifies multiple tasks into a common symbolic representation. We use spatially-aligned skeleton signals to replicate body motion and implicit facial features extracted from source images to reenact expressions, enabling the generation of character videos with high controllability and expressiveness. Furthermore, to enhance environmental integration during character replacement, we develop an auxiliary Relighting LoRA. This module preserves the character's appearance consistency while applying the appropriate environmental lighting and color tone. Experimental results demonstrate that Wan-Animate achieves state-of-the-art performance. We are committed to open-sourcing the model weights and its source code.
Collaborative AI Enhances Image Understanding in Materials Science
Mar 17, 2025



The Copilot for Real-world Experimental Scientist (CRESt) system empowers researchers to control autonomous laboratories through conversational AI, providing a seamless interface for managing complex experimental workflows. We have enhanced CRESt by integrating a multi-agent collaboration mechanism that utilizes the complementary strengths of the ChatGPT and Gemini models for precise image analysis in materials science. This innovative approach significantly improves the accuracy of experimental outcomes by fostering structured debates between the AI models, which enhances decision-making processes in materials phase analysis. Additionally, to evaluate the generalizability of this approach, we tested it on a quantitative task of counting particles. Here, the collaboration between the AI models also led to improved results, demonstrating the versatility and robustness of this method. By harnessing this dual-AI framework, this approach stands as a pioneering method for enhancing experimental accuracy and efficiency in materials research, with applications extending beyond CRESt to broader scientific experimentation and analysis.
Frankenstein Optimizer: Harnessing the Potential by Revisiting Optimization Tricks
Mar 04, 2025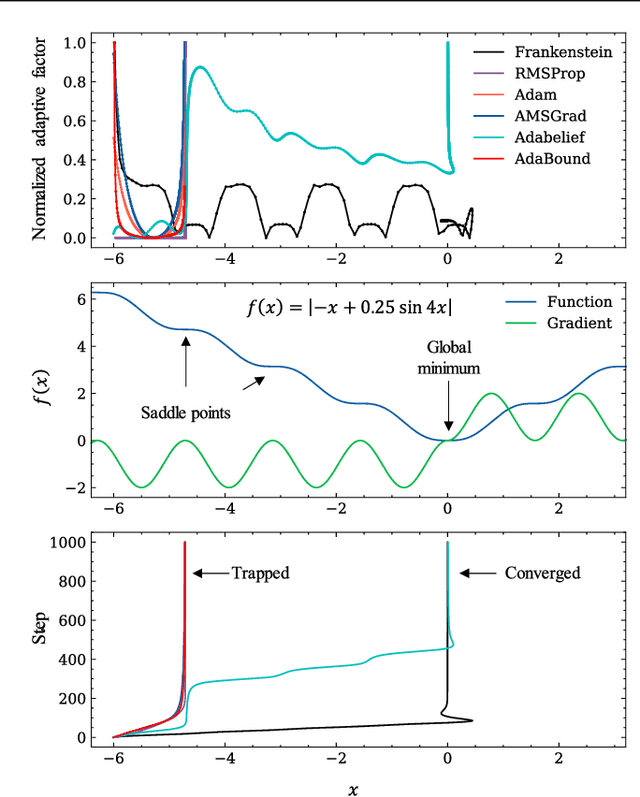
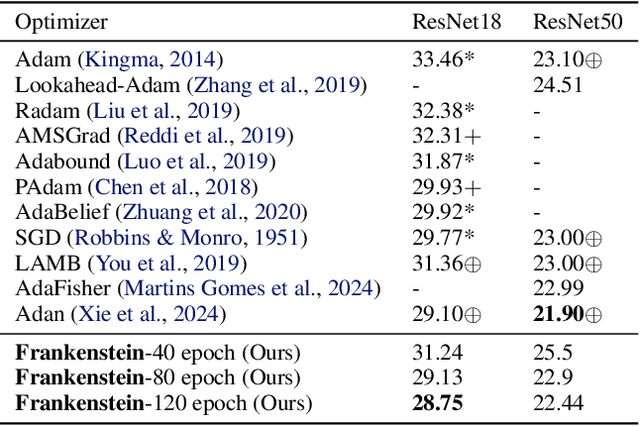
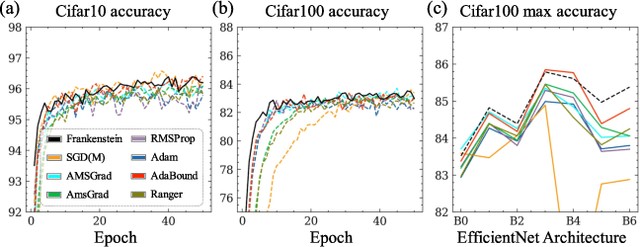
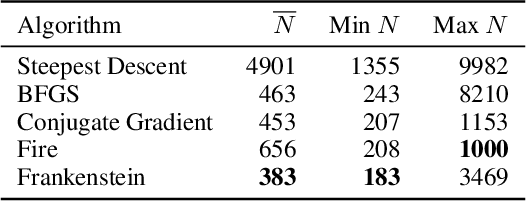
Gradient-based optimization drives the unprecedented performance of modern deep neural network models across diverse applications. Adaptive algorithms have accelerated neural network training due to their rapid convergence rates; however, they struggle to find ``flat minima" reliably, resulting in suboptimal generalization compared to stochastic gradient descent (SGD). By revisiting various adaptive algorithms' mechanisms, we propose the Frankenstein optimizer, which combines their advantages. The proposed Frankenstein dynamically adjusts first- and second-momentum coefficients according to the optimizer's current state to directly maintain consistent learning dynamics and immediately reflect sudden gradient changes. Extensive experiments across several research domains such as computer vision, natural language processing, few-shot learning, and scientific simulations show that Frankenstein surpasses existing adaptive algorithms and SGD empirically regarding convergence speed and generalization performance. Furthermore, this research deepens our understanding of adaptive algorithms through centered kernel alignment analysis and loss landscape visualization during the learning process.
Contrastive Learning of English Language and Crystal Graphs for Multimodal Representation of Materials Knowledge
Feb 23, 2025



Artificial intelligence (AI) is increasingly used for the inverse design of materials, such as crystals and molecules. Existing AI research on molecules has integrated chemical structures of molecules with textual knowledge to adapt to complex instructions. However, this approach has been unattainable for crystals due to data scarcity from the biased distribution of investigated crystals and the lack of semantic supervision in peer-reviewed literature. In this work, we introduce a contrastive language-crystals model (CLaC) pre-trained on a newly synthesized dataset of 126k crystal structure-text pairs. To demonstrate the advantage of using synthetic data to overcome data scarcity, we constructed a comparable dataset extracted from academic papers. We evaluate CLaC's generalization ability through various zero-shot cross-modal tasks and downstream applications. In experiments, CLaC achieves state-of-the-art zero-shot generalization performance in understanding crystal structures, surpassing latest large language models.
Bounds of Block Rewards in Honest PinFi Systems
Apr 01, 2024



PinFi is a class of novel protocols for decentralized pricing of dissipative assets, whose value naturally declines over time. Central to the protocol's functionality and its market efficiency is the role of liquidity providers (LPs). This study addresses critical stability and sustainability challenges within the protocol, namely: the propensity of LPs to prefer selling in external markets over participation in the protocol; a similar inclination towards selling within the PinFi system rather than contributing as LPs; and a scenario where LPs are disinclined to sell within the protocol. Employing a game-theoretic approach, we explore PinFi's mechanisms and its broader ramifications. Our findings reveal that, under a variety of common conditions and with an assumption of participant integrity, PinFi is capable of fostering a dynamic equilibrium among LPs, sellers, and buyers. This balance is maintained through a carefully calibrated range of block rewards for LPs, ensuring the protocol's long-term stability and utility.
Generative Model for Constructing Reaction Path from Initial to Final States
Jan 19, 2024
Mapping out reaction pathways and their corresponding activation barriers is a significant aspect of molecular simulation. Given their inherent complexity and nonlinearity, even generating a initial guess of these paths remains a challenging problem. Presented in this paper is an innovative approach that utilizes neural networks to generate initial guess for these reaction pathways. The proposed method is initiated by inputting the coordinates of the initial state, followed by progressive alterations to its structure. This iterative process culminates in the generation of the approximate representation of the reaction path and the coordinates of the final state. The application of this method extends to complex reaction pathways illustrated by organic reactions. Training was executed on the Transition1x dataset, an organic reaction pathway dataset. The results revealed generation of reactions that bore substantial similarities with the corresponding test data. The method's flexibility allows for reactions to be generated either to conform to predetermined conditions or in a randomized manner.
Blind quantum machine learning with quantum bipartite correlator
Oct 19, 2023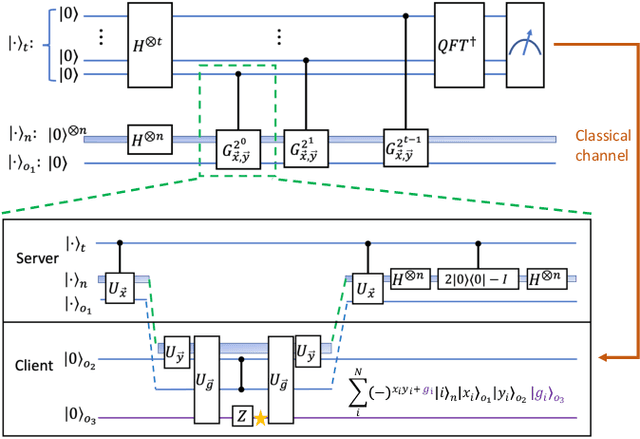
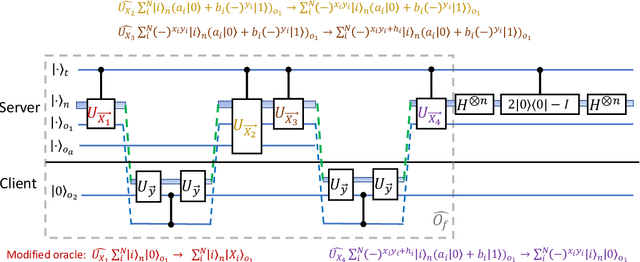
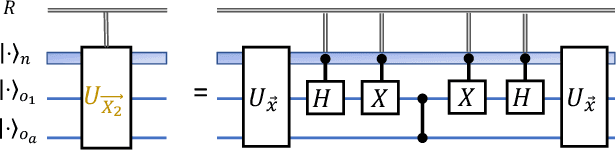
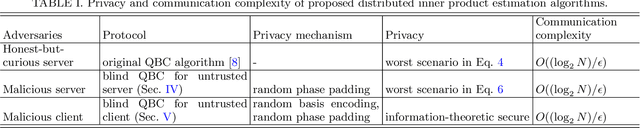
Distributed quantum computing is a promising computational paradigm for performing computations that are beyond the reach of individual quantum devices. Privacy in distributed quantum computing is critical for maintaining confidentiality and protecting the data in the presence of untrusted computing nodes. In this work, we introduce novel blind quantum machine learning protocols based on the quantum bipartite correlator algorithm. Our protocols have reduced communication overhead while preserving the privacy of data from untrusted parties. We introduce robust algorithm-specific privacy-preserving mechanisms with low computational overhead that do not require complex cryptographic techniques. We then validate the effectiveness of the proposed protocols through complexity and privacy analysis. Our findings pave the way for advancements in distributed quantum computing, opening up new possibilities for privacy-aware machine learning applications in the era of quantum technologies.
1.5 million materials narratives generated by chatbots
Aug 25, 2023The advent of artificial intelligence (AI) has enabled a comprehensive exploration of materials for various applications. However, AI models often prioritize frequently encountered materials in the scientific literature, limiting the selection of suitable candidates based on inherent physical and chemical properties. To address this imbalance, we have generated a dataset of 1,494,017 natural language-material paragraphs based on combined OQMD, Materials Project, JARVIS, COD and AFLOW2 databases, which are dominated by ab initio calculations and tend to be much more evenly distributed on the periodic table. The generated text narratives were then polled and scored by both human experts and ChatGPT-4, based on three rubrics: technical accuracy, language and structure, and relevance and depth of content, showing similar scores but with human-scored depth of content being the most lagging. The merger of multi-modality data sources and large language model (LLM) holds immense potential for AI frameworks to help the exploration and discovery of solid-state materials for specific applications.
A new 3-DOF 2T1R parallel mechanism: Topology design and kinematics
Jun 22, 2023



This article presents a new three-degree-of-freedom (3-DOF) parallel mechanism (PM) with two translations and one rotation (2T1R), designed based on the topological design theory of the parallel mechanism using position and orientation characteristics (POC). The PM is primarily intended for use in package sorting and delivery. The mobile platform of the PM moves along a translation axis, picks up objects from a conveyor belt, and tilts them to either side of the axis. We first calculate the PM's topological characteristics, such as the degree of freedom (DOF) and the degree of coupling, and provide its topological analytical formula to represent the topological information of the PM. Next, we solve the direct and inverse kinematic models based on the kinematic modelling principle using the topological features. The models are purely analytic and are broken down into a series of quadratic equations, making them suitable for use in an industrial robot. We also study the singular configurations to identify the serial and parallel singularities. Using the decoupling properties, we size the mechanism to address the package sorting and depositing problem using an algebraic approach. To determine the smallest segment lengths, we use a cylindrical algebraic decomposition to solve a system with inequalities.
Can ChatGPT be used to generate scientific hypotheses?
Mar 30, 2023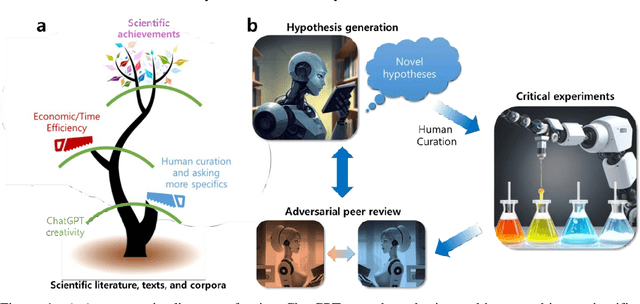
We investigate whether large language models can perform the creative hypothesis generation that human researchers regularly do. While the error rate is high, generative AI seems to be able to effectively structure vast amounts of scientific knowledge and provide interesting and testable hypotheses. The future scientific enterprise may include synergistic efforts with a swarm of "hypothesis machines", challenged by automated experimentation and adversarial peer reviews.