 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Robustness of 3D Object Detection to Common Corruptions in Autonomous Driving
Mar 20, 20233D object detection is an important task in autonomous driving to perceive the surroundings. Despite the excellent performance, the existing 3D detectors lack the robustness to real-world corruptions caused by adverse weathers, sensor noises, etc., provoking concerns about the safety and reliability of autonomous driving systems. To comprehensively and rigorously benchmark the corruption robustness of 3D detectors, in this paper we design 27 types of common corruptions for both LiDAR and camera inputs considering real-world driving scenarios. By synthesizing these corruptions on public datasets, we establish three corruption robustness benchmarks -- KITTI-C, nuScenes-C, and Waymo-C. Then, we conduct large-scale experiments on 24 diverse 3D object detection models to evaluate their corruption robustness. Based on the evaluation results, we draw several important findings, including: 1) motion-level corruptions are the most threatening ones that lead to significant performance drop of all models; 2) LiDAR-camera fusion models demonstrate better robustness; 3) camera-only models are extremely vulnerable to image corruptions, showing the indispensability of LiDAR point clouds. We release the benchmarks and codes at https://github.com/kkkcx/3D_Corruptions_AD. We hope that our benchmarks and findings can provide insights for future research on developing robust 3D object detection models.
Adversarial samples for deep monocular 6D object pose estimation
Mar 05, 2022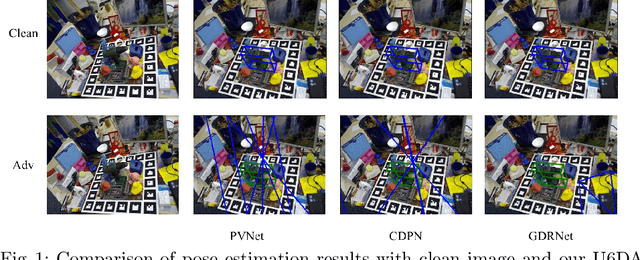
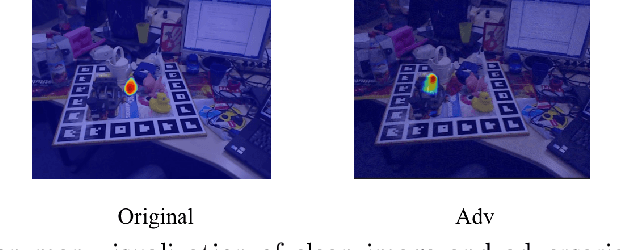

Estimating 6D object pose from an RGB image is important for many real-world applications such as autonomous driving and robotic grasping. Recent deep learning models have achieved significant progress on this task but their robustness received little research attention. In this work, for the first time, we study adversarial samples that can fool deep learning models with imperceptible perturbations to input image. In particular, we propose a Unified 6D pose estimation Attack, namely U6DA, which can successfully attack several state-of-the-art (SOTA) deep learning models for 6D pose estimation. The key idea of our U6DA is to fool the models to predict wrong results for object instance localization and shape that are essential for correct 6D pose estimation. Specifically, we explore a transfer-based black-box attack to 6D pose estimation. We design the U6DA loss to guide the generation of adversarial examples, the loss aims to shift the segmentation attention map away from its original position. We show that the generated adversarial samples are not only effective for direct 6D pose estimation models, but also are able to attack two-stage models regardless of their robust RANSAC modules. Extensive experiments were conducted to demonstrate the effectiveness, transferability, and anti-defense capability of our U6DA on large-scale public benchmarks. We also introduce a new U6DA-Linemod dataset for robustness study of the 6D pose estimation task. Our codes and dataset will be available at \url{https://github.com/cuge1995/U6DA}.
Boosting 3D Adversarial Attacks with Attacking On Frequency
Jan 26, 2022
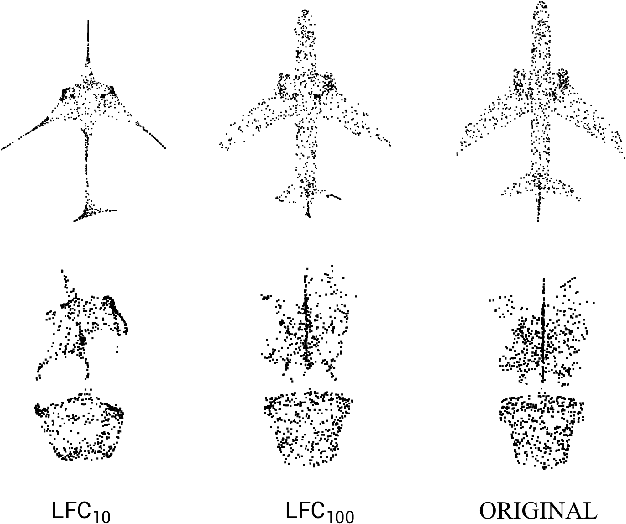
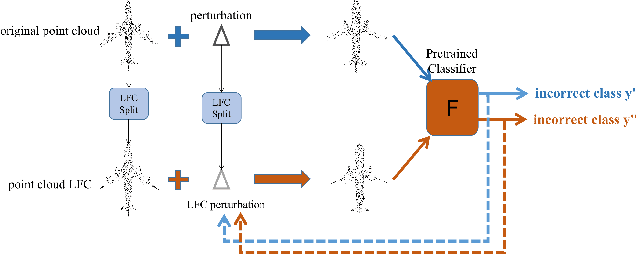
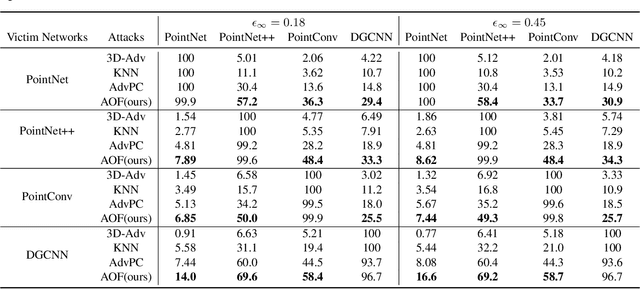
Deep neural networks (DNNs) have been shown to be vulnerable to adversarial attacks. Recently, 3D adversarial attacks, especially adversarial attacks on point clouds, have elicited mounting interest. However, adversarial point clouds obtained by previous methods show weak transferability and are easy to defend. To address these problems, in this paper we propose a novel point cloud attack (dubbed AOF) that pays more attention on the low-frequency component of point clouds. We combine the losses from point cloud and its low-frequency component to craft adversarial samples. Extensive experiments validate that AOF can improve the transferability significantly compared to state-of-the-art (SOTA) attacks, and is more robust to SOTA 3D defense methods. Otherwise, compared to clean point clouds, adversarial point clouds obtained by AOF contain more deformation than outlier.
3D Adversarial Attacks Beyond Point Cloud
Apr 25, 2021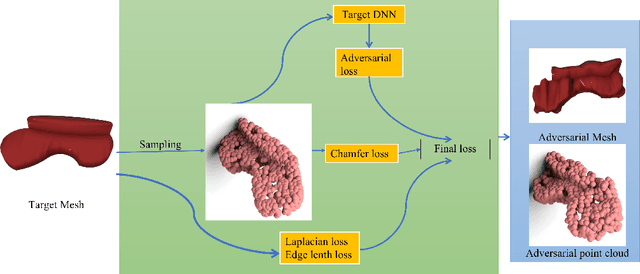
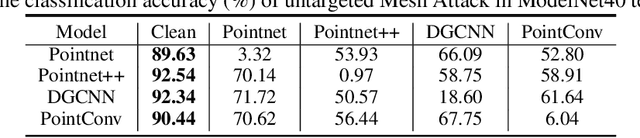
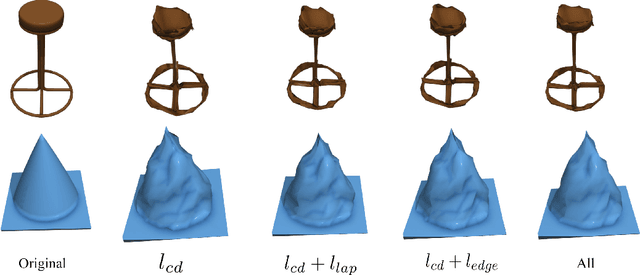
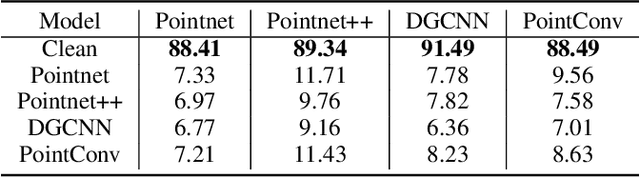
Previous adversarial attacks on 3D point clouds mainly focus on add perturbation to the original point cloud, but the generated adversarial point cloud example does not strictly represent a 3D object in the physical world and has lower transferability or easily defend by the simple SRS/SOR. In this paper, we present a novel adversarial attack, named Mesh Attack to address this problem. Specifically, we perform perturbation on the mesh instead of point clouds and obtain the adversarial mesh examples and point cloud examples simultaneously. To generate adversarial examples, we use a differential sample module that back-propagates the loss of point cloud classifier to the mesh vertices and a mesh loss that regularizes the mesh to be smooth. Extensive experiments demonstrated that the proposed scheme outperforms the SOTA attack methods. Our code is available at: {\footnotesize{\url{https://github.com/cuge1995/Mesh-Attack}}}.
The art of defense: letting networks fool the attacker
Apr 07, 2021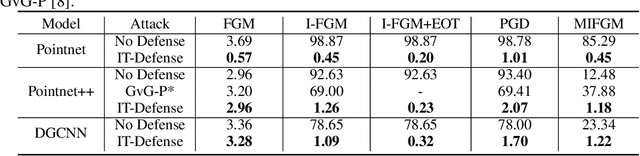
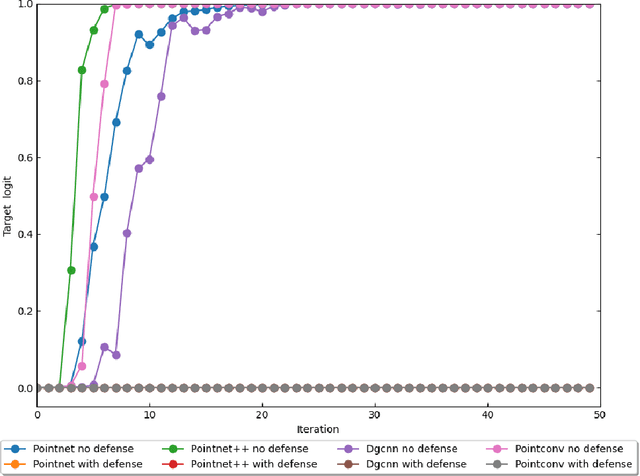
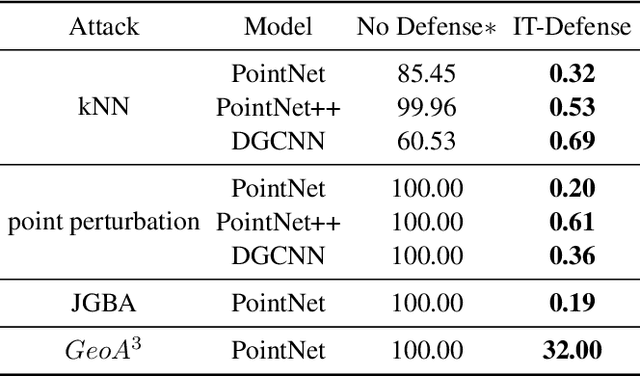
Some deep neural networks are invariant to some input transformations, such as Pointnetis permutation invariant to the input point cloud. In this paper, we demonstrated this property can be powerful in the defense of gradient based attacks. Specifically, we apply random input transformation which is invariant to networks we want to defend. Extensive experiments demonstrate that the proposed scheme outperforms the SOTA defense methods, and breaking the attack accuracy into nearly zero.
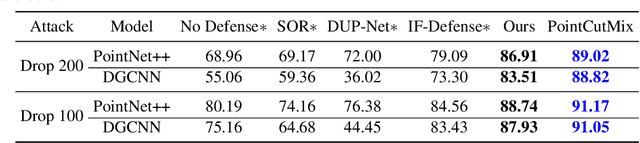
PointCutMix: Regularization Strategy for Point Cloud Classification
Feb 05, 2021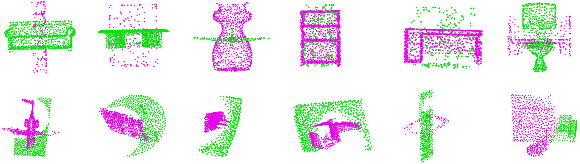
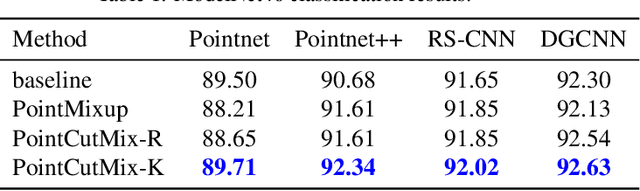

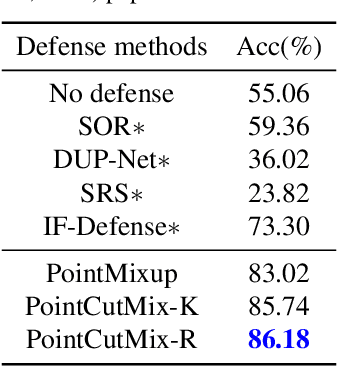
As 3D point cloud analysis has received increasing attention, the insufficient scale of point cloud datasets and the weak generalization ability of networks become prominent. In this paper, we propose a simple and effective augmentation method for the point cloud data, named PointCutMix, to alleviate those problems. It finds the optimal assignment between two point clouds and generates new training data by replacing the points in one sample with their optimal assigned pairs. Two replacement strategies are proposed to adapt to the accuracy or robustness requirement for different tasks, one of which is to randomly select all replacing points while the other one is to select k nearest neighbors of a single random point. Both strategies consistently and significantly improve the performance of various models on point cloud classification problems. By introducing the saliency maps to guide the selection of replacing points, the performance further improves. Moreover, PointCutMix is validated to enhance the model robustness against the point attack. It is worth noting that when using as a defense method, our method outperforms the state-of-the-art defense algorithms. The code is available at:https://github.com/cuge1995/PointCutMix