 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHopFIR: Hop-wise GraphFormer with Intragroup Joint Refinement for 3D Human Pose Estimation
Feb 28, 20232D-to-3D human pose lifting is fundamental for 3D human pose estimation (HPE). Graph Convolutional Network (GCN) has been proven inherently suitable to model the human skeletal topology. However, current GCN-based 3D HPE methods update the node features by aggregating their neighbors' information without considering the interaction of joints in different motion patterns. Although some studies import limb information to learn the movement patterns, the latent synergies among joints, such as maintaining balance in the motion are seldom investigated. We propose a hop-wise GraphFormer with intragroup joint refinement (HopFIR) to tackle the 3D HPE problem. The HopFIR mainly consists of a novel Hop-wise GraphFormer(HGF) module and an Intragroup Joint Refinement(IJR) module which leverages the prior limb information for peripheral joints refinement. The HGF module groups the joints by $k$-hop neighbors and utilizes a hop-wise transformer-like attention mechanism among these groups to discover latent joint synergy. Extensive experimental results show that HopFIR outperforms the SOTA methods with a large margin (on the Human3.6M dataset, the mean per joint position error (MPJPE) is 32.67mm). Furthermore, it is also demonstrated that previous SOTA GCN-based methods can benefit from the proposed hop-wise attention mechanism efficiently with significant performance promotion, such as SemGCN and MGCN are improved by 8.9% and 4.5%, respectively.
Incorporating Prior Knowledge into Reinforcement Learning for Soft Tissue Manipulation with Autonomous Grasping Point Selection
Jul 21, 2022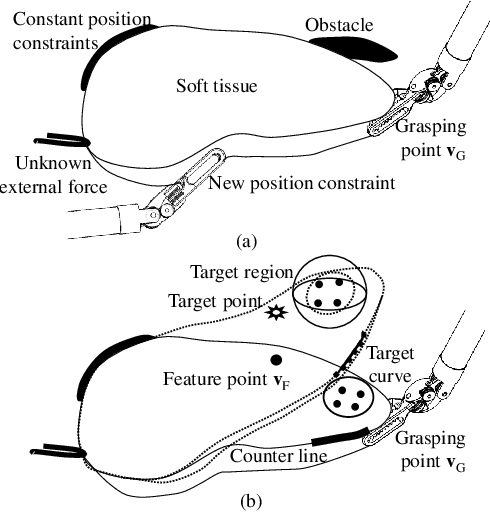
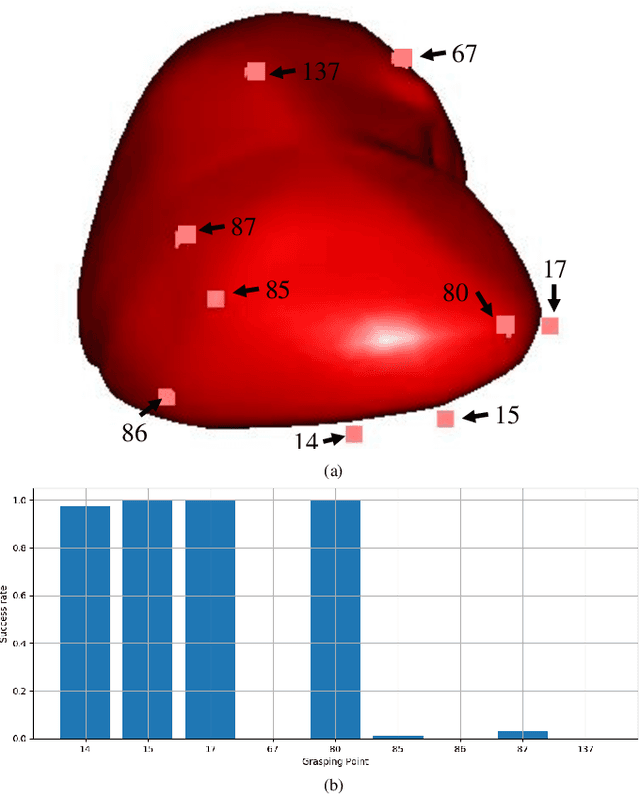
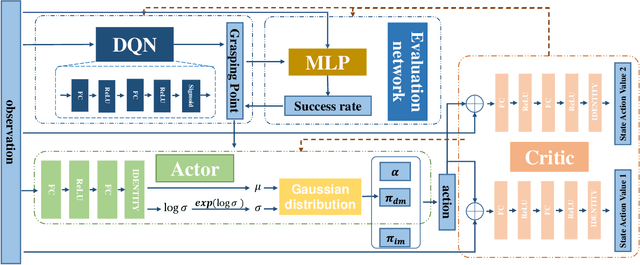
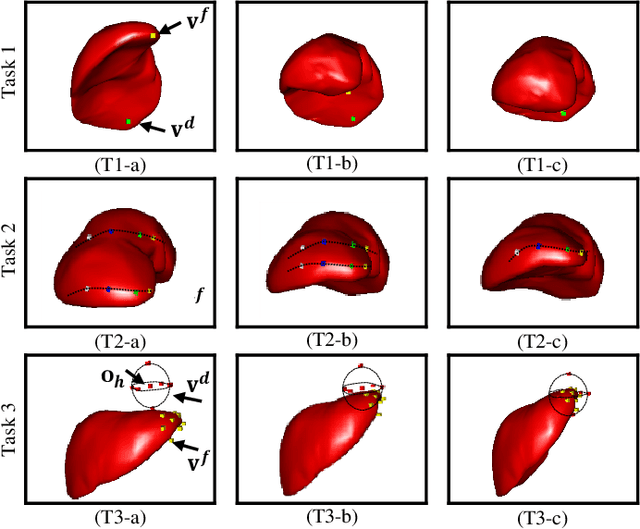
Previous soft tissue manipulation studies assumed that the grasping point was known and the target deformation can be achieved. During the operation, the constraints are supposed to be constant, and there is no obstacles around the soft tissue. To go beyond these assumptions, a deep reinforcement learning framework with prior knowledge is proposed for soft tissue manipulation under unknown constraints, such as the force applied by fascia. The prior knowledge is represented through an intuitive manipulation strategy. As an action of the agent, a regulator factor is used to coordinate the intuitive approach and the deliberate network. A reward function is designed to balance the exploration and exploitation for large deformation. Successful simulation results verify that the proposed framework can manipulate the soft tissue while avoiding obstacles and adding new position constraints. Compared with the soft actor-critic (SAC) algorithm, the proposed framework can accelerate the training procedure and improve the generalization.
3D Adversarial Attacks Beyond Point Cloud
Apr 25, 2021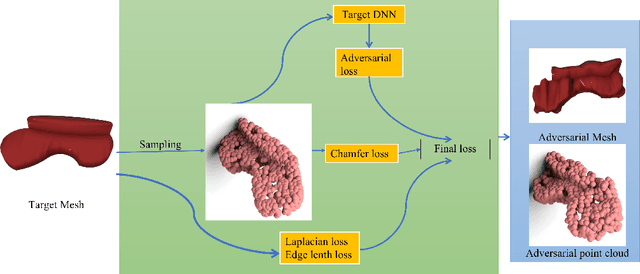
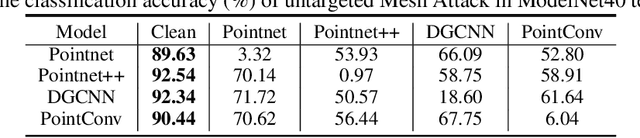
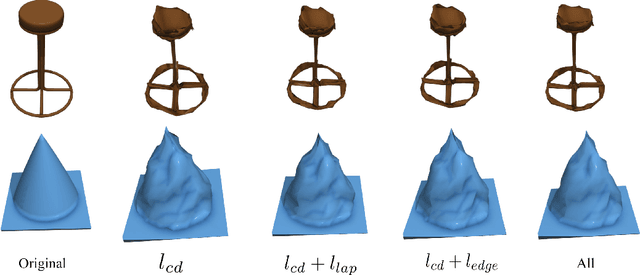
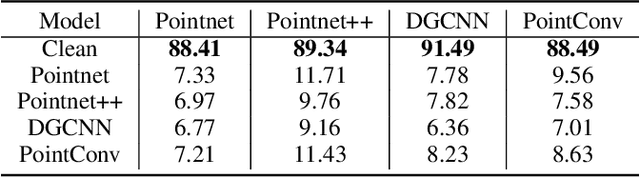
Previous adversarial attacks on 3D point clouds mainly focus on add perturbation to the original point cloud, but the generated adversarial point cloud example does not strictly represent a 3D object in the physical world and has lower transferability or easily defend by the simple SRS/SOR. In this paper, we present a novel adversarial attack, named Mesh Attack to address this problem. Specifically, we perform perturbation on the mesh instead of point clouds and obtain the adversarial mesh examples and point cloud examples simultaneously. To generate adversarial examples, we use a differential sample module that back-propagates the loss of point cloud classifier to the mesh vertices and a mesh loss that regularizes the mesh to be smooth. Extensive experiments demonstrated that the proposed scheme outperforms the SOTA attack methods. Our code is available at: {\footnotesize{\url{https://github.com/cuge1995/Mesh-Attack}}}.
The art of defense: letting networks fool the attacker
Apr 07, 2021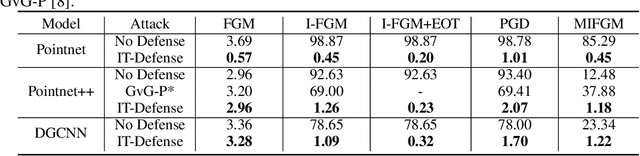
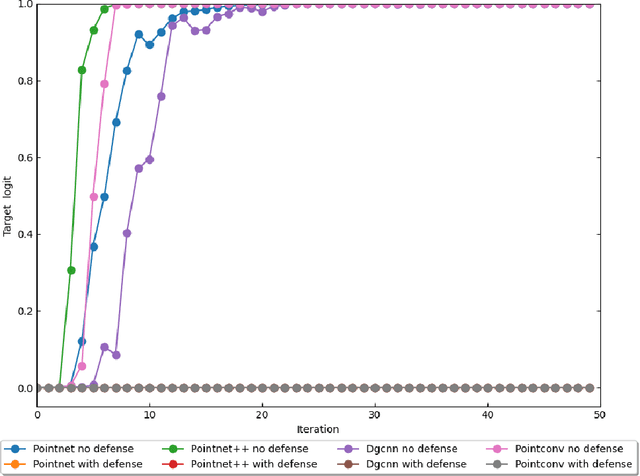
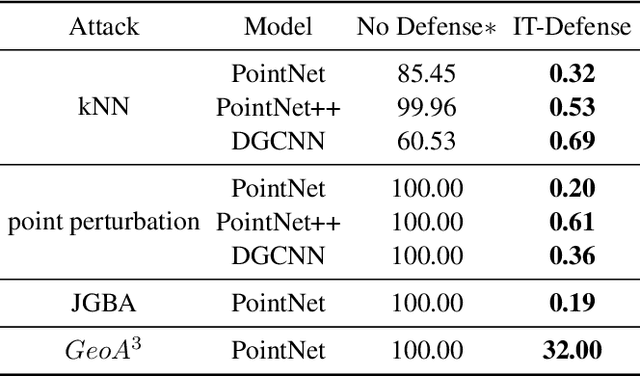
Some deep neural networks are invariant to some input transformations, such as Pointnetis permutation invariant to the input point cloud. In this paper, we demonstrated this property can be powerful in the defense of gradient based attacks. Specifically, we apply random input transformation which is invariant to networks we want to defend. Extensive experiments demonstrate that the proposed scheme outperforms the SOTA defense methods, and breaking the attack accuracy into nearly zero.
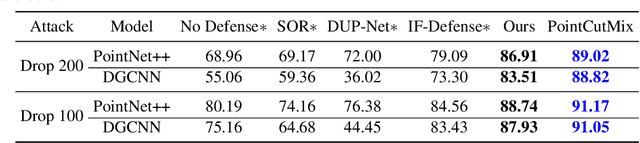
PointCutMix: Regularization Strategy for Point Cloud Classification
Feb 05, 2021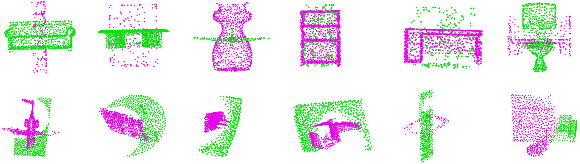
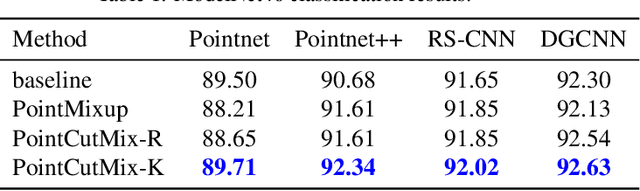

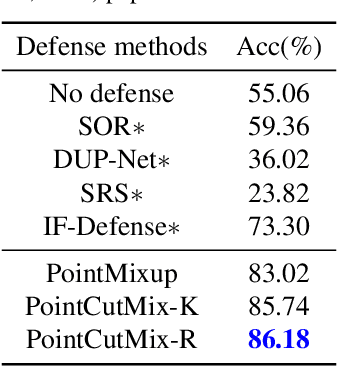
As 3D point cloud analysis has received increasing attention, the insufficient scale of point cloud datasets and the weak generalization ability of networks become prominent. In this paper, we propose a simple and effective augmentation method for the point cloud data, named PointCutMix, to alleviate those problems. It finds the optimal assignment between two point clouds and generates new training data by replacing the points in one sample with their optimal assigned pairs. Two replacement strategies are proposed to adapt to the accuracy or robustness requirement for different tasks, one of which is to randomly select all replacing points while the other one is to select k nearest neighbors of a single random point. Both strategies consistently and significantly improve the performance of various models on point cloud classification problems. By introducing the saliency maps to guide the selection of replacing points, the performance further improves. Moreover, PointCutMix is validated to enhance the model robustness against the point attack. It is worth noting that when using as a defense method, our method outperforms the state-of-the-art defense algorithms. The code is available at:https://github.com/cuge1995/PointCutMix
Artificial intelligence empowered multi-AGVs in manufacturing systems
Sep 08, 2019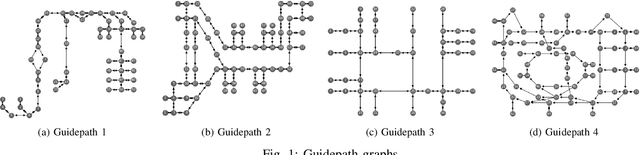
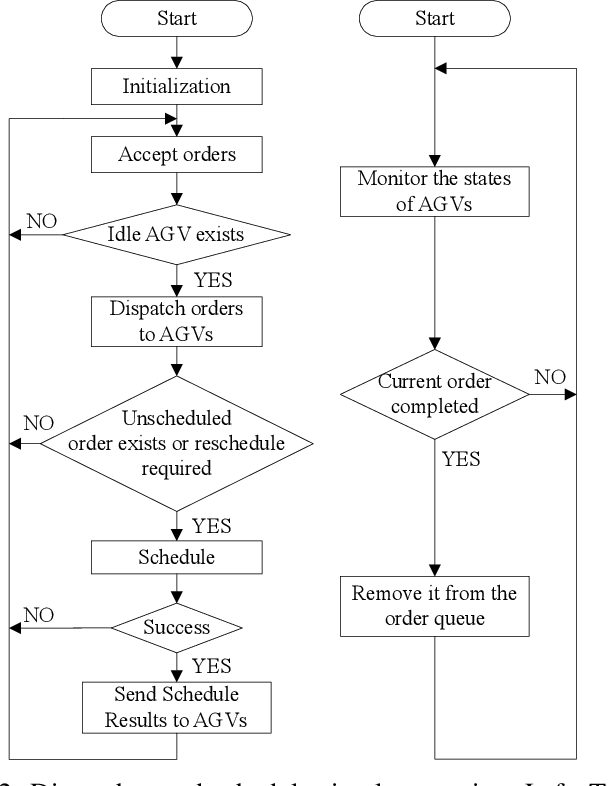
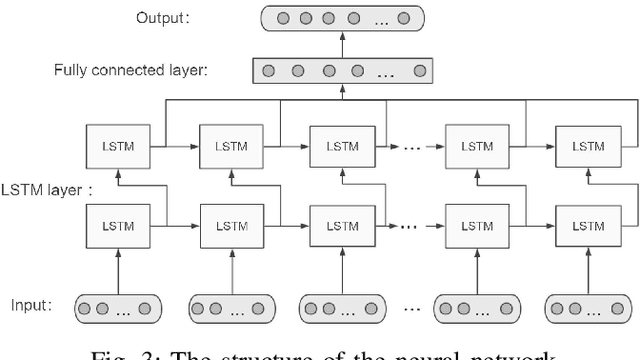
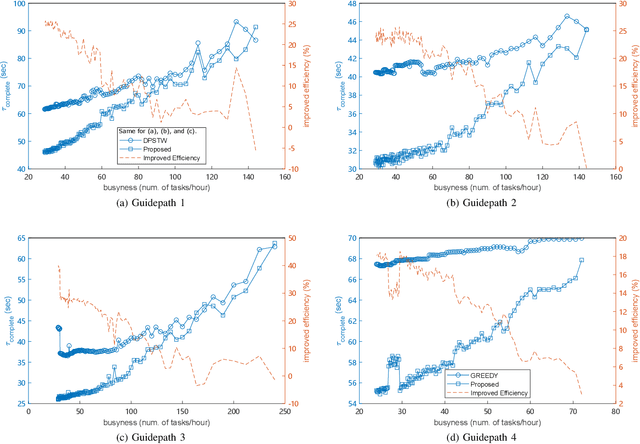
AGVs are driverless robotic vehicles that picks up and delivers materials. How to improve the efficiency while preventing deadlocks is the core issue in designing AGV systems. In this paper, we propose an approach to tackle this problem.The proposed approach includes a traditional AGV scheduling algorithm, which aims at solving deadlock problems, and an artificial neural network based component, which predict future tasks of the AGV system, and make decisions on whether to send an AGV to the predicted starting location of the upcoming task,so as to save the time of waiting for an AGV to go to there first when the upcoming task is created. Simulation results show that the proposed method significantly improves the efficiency as against traditional method, up to 20% to 30%.
Robot Composite Learning and the Nunchaku Flipping Challenge
Sep 11, 2017
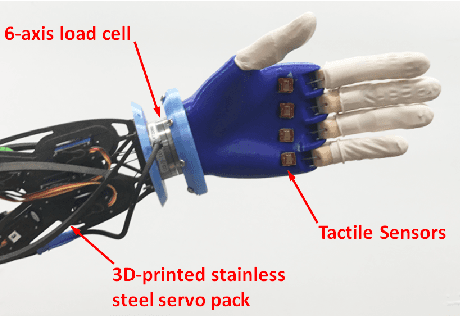
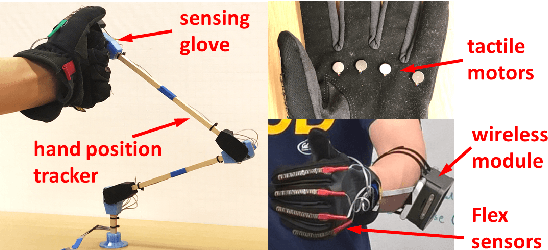
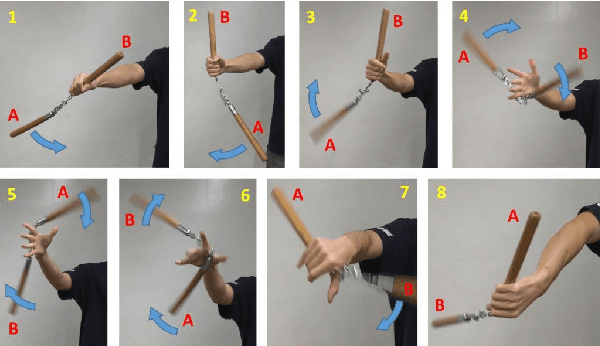
Advanced motor skills are essential for robots to physically coexist with humans. Much research on robot dynamics and control has achieved success on hyper robot motor capabilities, but mostly through heavily case-specific engineering. Meanwhile, in terms of robot acquiring skills in a ubiquitous manner, robot learning from human demonstration (LfD) has achieved great progress, but still has limitations handling dynamic skills and compound actions. In this paper, we present a composite learning scheme which goes beyond LfD and integrates robot learning from human definition, demonstration, and evaluation. The method tackles advanced motor skills that require dynamic time-critical maneuver, complex contact control, and handling partly soft partly rigid objects. We also introduce the "nunchaku flipping challenge", an extreme test that puts hard requirements to all these three aspects. Continued from our previous presentations, this paper introduces the latest update of the composite learning scheme and the physical success of the nunchaku flipping challenge.
Multiform Adaptive Robot Skill Learning from Humans
Aug 17, 2017
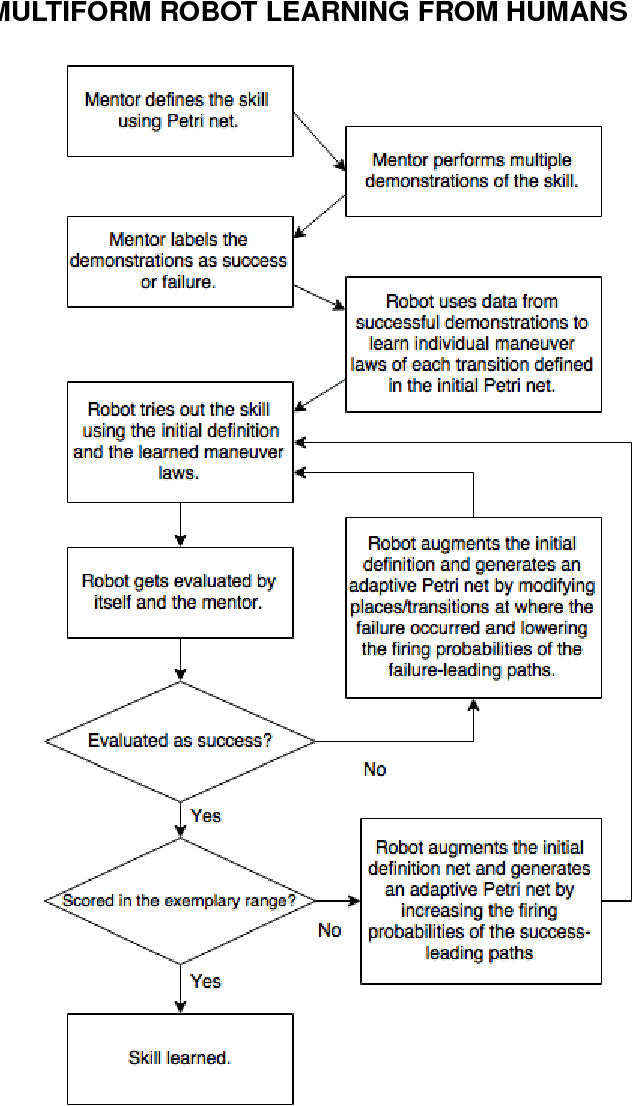
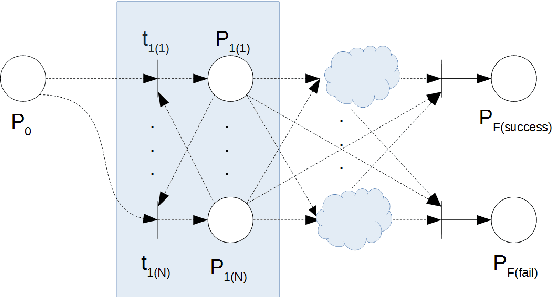
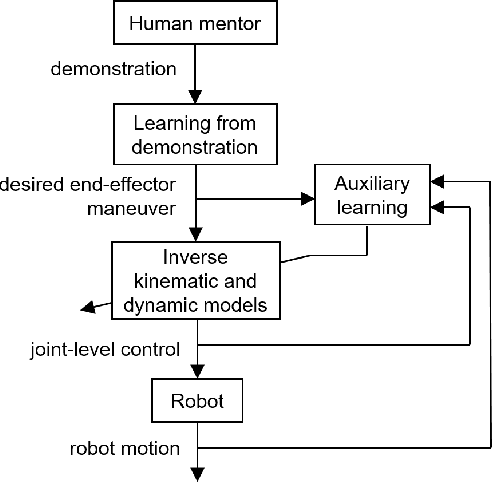
Object manipulation is a basic element in everyday human lives. Robotic manipulation has progressed from maneuvering single-rigid-body objects with firm grasping to maneuvering soft objects and handling contact-rich actions. Meanwhile, technologies such as robot learning from demonstration have enabled humans to intuitively train robots. This paper discusses a new level of robotic learning-based manipulation. In contrast to the single form of learning from demonstration, we propose a multiform learning approach that integrates additional forms of skill acquisition, including adaptive learning from definition and evaluation. Moreover, going beyond state-of-the-art technologies of handling purely rigid or soft objects in a pseudo-static manner, our work allows robots to learn to handle partly rigid partly soft objects with time-critical skills and sophisticated contact control. Such capability of robotic manipulation offers a variety of new possibilities in human-robot interaction.